LabVIEW控制Arduino实现红外测距(进阶篇—6)

目录
1、项目概述
红外测距是一种非直接接触的测量方式,由于其结构简单、抗干扰性强、成本低等优点,在测量测绘上得到广泛的运用。
红外线在通过云雾等充满悬浮离子的物质时不易发生散射,有较强的穿透能力,还具有抗干扰能力强、易于产生、对环境影响小、不会干扰临近的无线电设备的特点,同时,红外光具有反射、折射、散射、干涉、吸收等特性,因而被广泛应用。
本篇博文将介绍使用夏普公司的GP2D12红外传感器、Arduino Uno和LabVIEW组成红外测距系统,可用于机器人避障等场合的距离测量。
2、项目架构
红外测距系统框图如下图所示:

在整个系统中,Arduino Uno作为下位机,负责读取GP2D12红外传感器的输出值以及上传数据,LabVIEW软件作为上位机,负责将测量的电压转换为距离值并显示出来,上下位机利用USB-TTL接口实现通信。
项目资源请参见:LabVIEW控制Arduino实现红外测距-单片机文档类资源
3、硬件环境
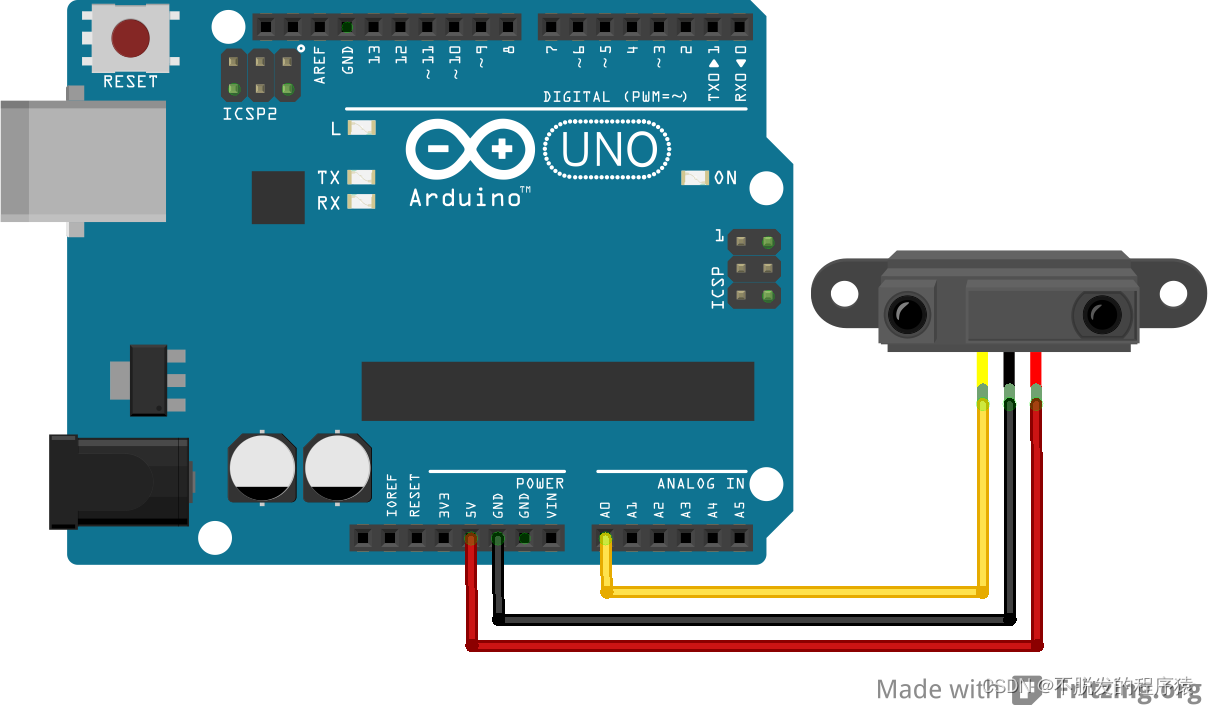
将GP2D12红外传感器的VCC、GND、Vo分别接至Arduino Uno控制板上的+5V、GND、模拟端口A0。最好在VCC与GND之间并联100uF的电解电容,以稳定GP2D12的供电电压,从而使输出电压更加稳定。红外测距系统硬件连接如下图所示:
4、Arduino功能设计
在基于Arduino与LabVIEW的上下位机红外测距系统中,Arduino Uno控制板需要完成以下功能:接收和判断命令、采集和传输GP2D12传感器输出的电压。ArduinoUno控制板通过串口接收上位机发来的命令,分析得到有效命令,多次采集GP2D12传感器的电压输出值,并将GP2D12电压输出的平均值上传至LabVIEW软件。
Arduino Uno控制器负责读取LabVIEW上位机发来的距离测量命令,并通过GP2D12红外传感器获取距离数据,通过串口发送回上位机LabVIEW软件。Arduino Uno控制器的程序代码如下所示:
-
#define Infrared_COMMAND 0x10 //采集命令字
-
-
byte comdata[3]={0}; //定义数组数据,存放串口接收数据
-
-
void receive_data(void); //接受串口数据
-
void test_do_data(void); //测试串口数据是否正确,并更新数据
-
-
float SensorSum = 0;
-
int SensorPin = A0; // select the input pin for the potentiometer
-
-
void setup()
-
{
-
Serial.begin(9600);
-
-
}
-
void loop()
-
{
-
while (Serial.available() > 0) //不断检测串口是否有数据
-
{
-
receive_data(); //接受串口数据
-
test_do_data(); //测试数据是否正确并更新标志位
-
}
-
}
-
void receive_data(void)
-
{
-
int i ;
-
for(i=0;i<3;i++)
-
{
-
comdata[i] =Serial.read();
-
//延时一会,让串口缓存准备好下一个字节,不延时可能会导致数据丢失,
-
delay(2);
-
}
-
}
-
-
void test_do_data(void)
-
{
-
if(comdata[0] == 0x55) //0x55和0xAA均为判断是否为有效命令
-
{
-
if(comdata[1] == 0xAA)
-
{
-
if(comdata[2] == Infrared_COMMAND)
-
{
-
for (int i = 0; i < 10; i++){
-
SensorSum += analogRead(SensorPin);
-
delay(5);
-
}
-
Serial.println(SensorSum*5.00/1023/10,2);
-
SensorSum=0;
-
}
-
}
-
}
-
}
5、LabVIEW功能设计
LabVIEW上位机部分需要完成以下功能:
1、向下位机Arduino控制器发送红外数据采集命令,Arduino控制器通过串口接收上位机命令,完成红外数据采集之后并将采集的红外数据回传,LabVIEW软件将回传的红外数据转换为距离值并显示在前面板上。
2、通过红外传感器的电压与距离特性关系,拟合出电压与测量距离的拟合曲线,用于将电压更好地转换为测量距离值,而且由于LabVIEW的运算能力远远强于Arduino控制器的计算能力,将电压与距离的换算放在LabVIEW软件可以提高测量精度,并可以扩展其他的红外测距传感器,只需要其电压与距离的数值关系。
5.1、前面板设计
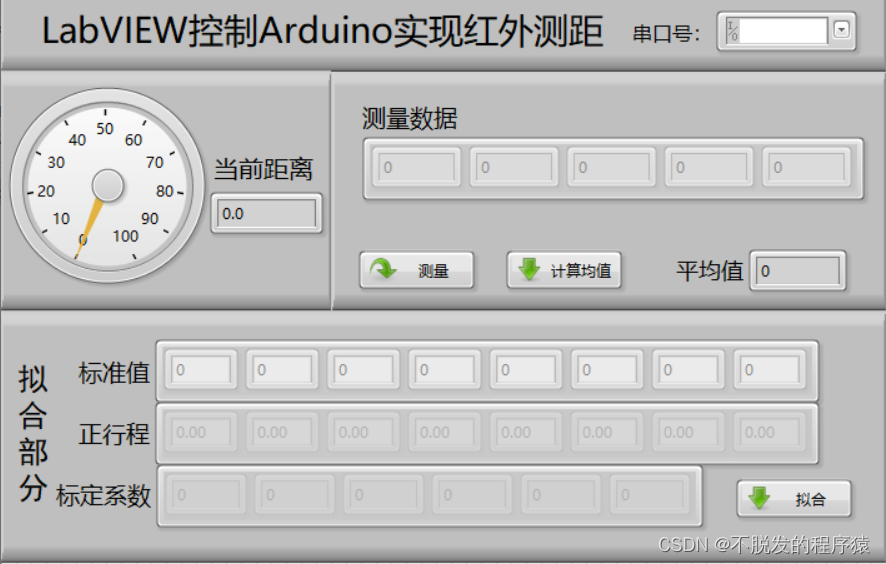
LabVIEW上位机前面板分为拟合和测量两个部分,拟合部分提供8个电压-距离的拟合点,以通过广义多项式拟合出最佳的曲线方程,提高系统的测量精度;测量部分提供多次测量显示,并通过多次测量计算平均值,以尽可能准确地获取距离数据。红外测距系统的LabVIEW上位机前面板,如下图所示:
5.2、程序框图设计
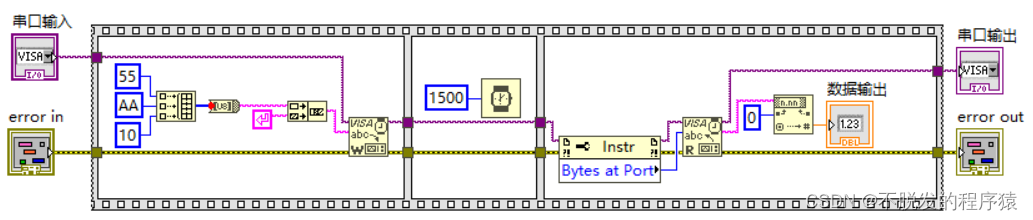
为了LabVIEW上位机程序结构更加清晰明了,更方便地进行程序设计,此处将LabVIEW与Arduino串口通信的LabVIEW上位机部分设计成测量子程序,在主程序中进行调用,其主要是向Arduino Uno控制器发送命令码,并获取Arduino Uno控制器返回的测量数据,实现测量功能。
测量子程序的前面板和程序框图,如下图所示:

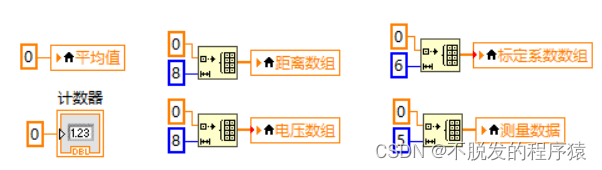
LabVIEW上位机主程序的结构为顺序结构+While循环+事件结构。首先,在顺序结构中的第一帧中,对所使用的数组、中间变量和显示控件进行初始化,在顺序结构的第2帧中,通过设置的串口号来初始化串口通信。然后,程序进入While循环和事件结构,不断地检测是否有事件得到响应并执行,事件结构有“测距_测量”、“测距_计算平均值”、和"曲线拟合”。最后,关闭串口通信。初始化程序框图如下图所示:
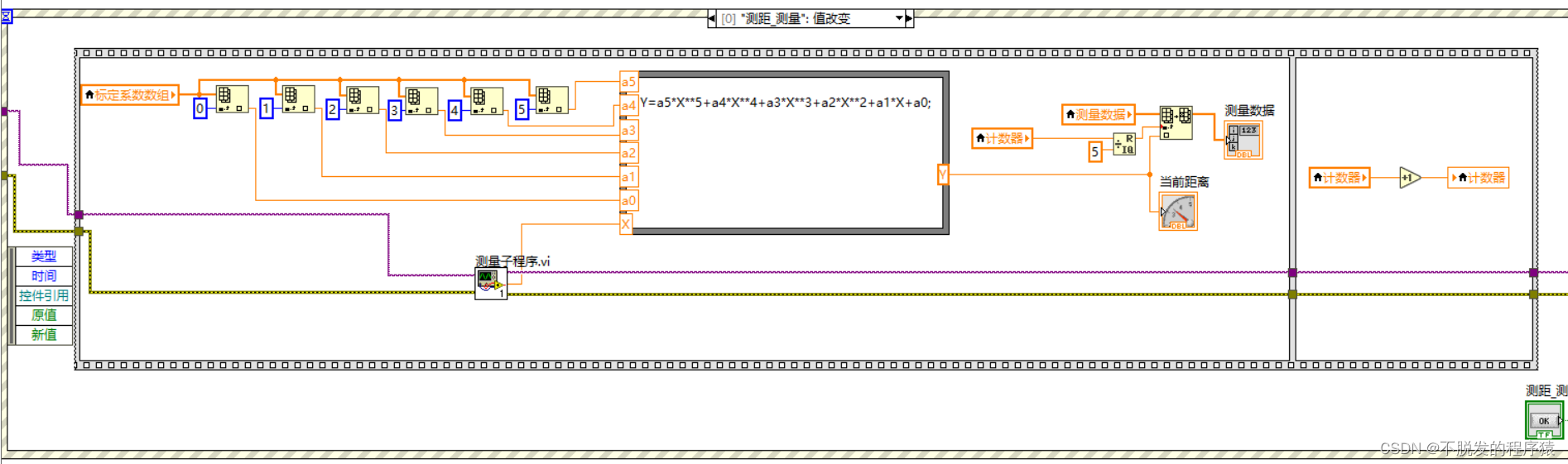
在“测距_测量"事件结构中,通过“测量子程序"读取Arduino Uno控制器返回的数据,并利用公式节点和5阶拟合系数计算得到所测量的距离,同时利用计数器将距离数据循环显示在测量数据中。“测距_测量"值改变事件程序框图(部分)如下图所示:
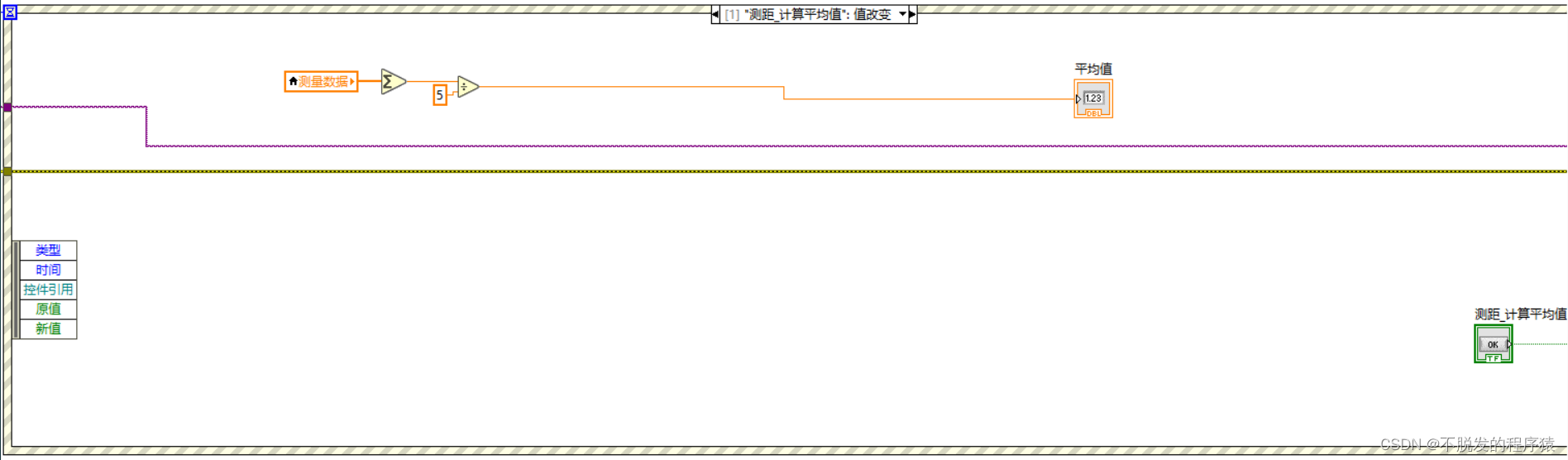
在"测距_计算平均值"事件结构中,通过对测量数据数组的5个元素相加并除以5,得到所测量距离的均值,这种通过多次测量的方法可以提高测距精度,满足较高精度的测距需求。“测距_计算平均值”值改变事件程序框图(部分)如下图所示:
在“曲线拟合"事件结构中,通过将距离数组和电压数组利用5阶广义多项式拟合方式,计算出拟合系数并显示在标定系数上。"曲线拟合”值改变事件程序框图如下图所示:
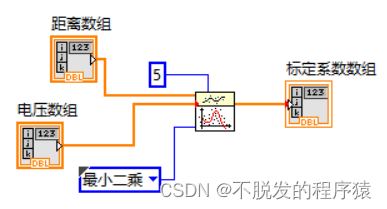
由于本节所采用的是普通红外测距传感器,通过广义多项式拟合方式可以较为精确地拟合出电压与距离之间的关系,使得测量精度有所提高。
项目资源请参见:LabVIEW控制Arduino实现红外测距-单片机文档类资源
文章来源: handsome-man.blog.csdn.net,作者:不脱发的程序猿,版权归原作者所有,如需转载,请联系作者。
原文链接:handsome-man.blog.csdn.net/article/details/125174762

- 点赞
- 收藏
- 关注作者
评论(0)