ROS2+Gazebo11+Car+OpenCV获取巡线视觉数据学习

【摘要】
环境介绍:
主系统win11,子系统ubuntu22.04,Gazebo11.10,ROS2 humble。
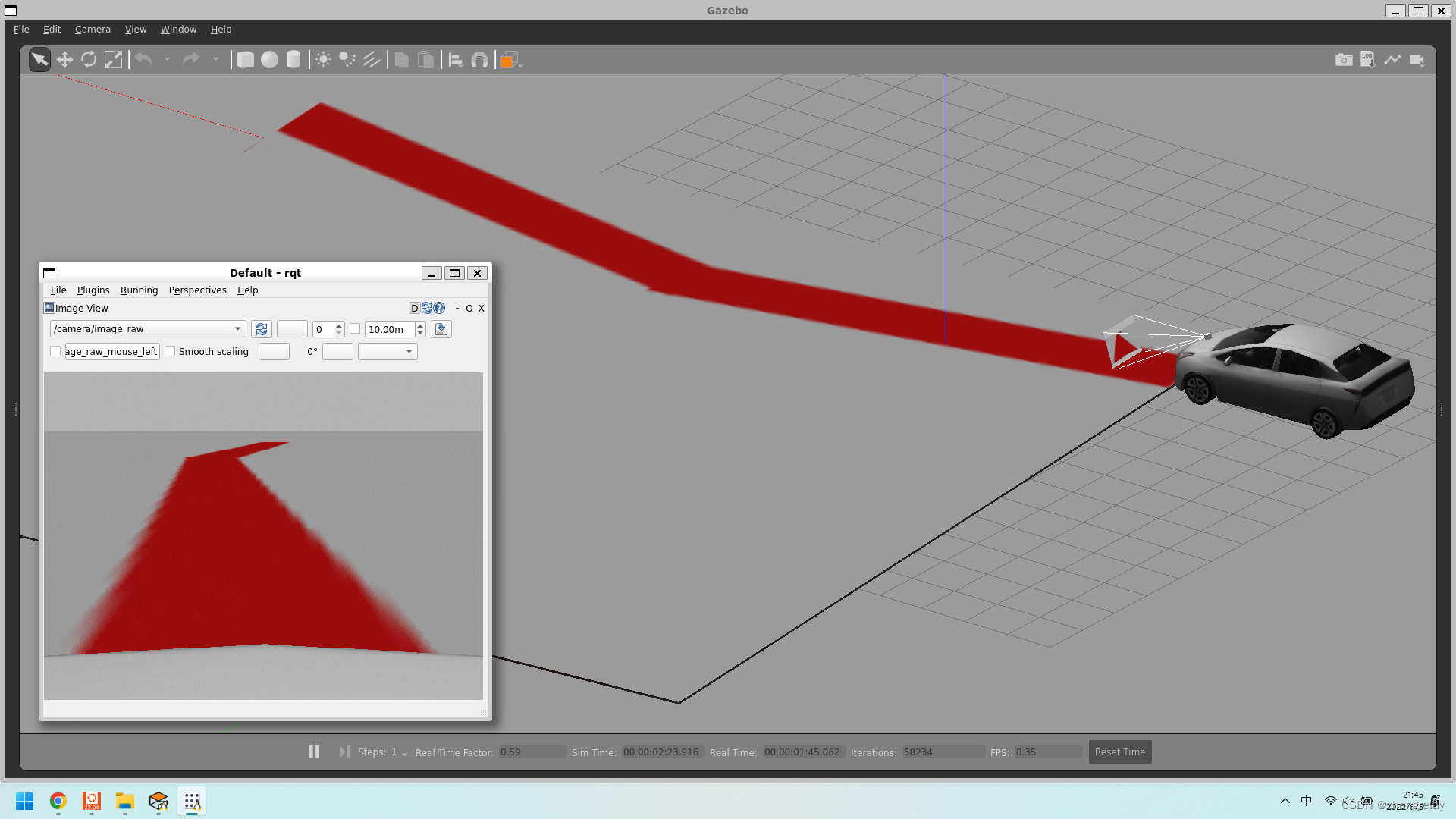
完成后,整体效果如下:
然后,对获取视觉数据进行处理可以实现巡线跑程序,后面一节再叙述。
需要配置摄像头也就是视觉插件:
<sensor name='camera' type='came...
环境介绍:
主系统win11,子系统ubuntu22.04,Gazebo11.10,ROS2 humble。

完成后,整体效果如下:
然后,对获取视觉数据进行处理可以实现巡线跑程序,后面一节再叙述。
需要配置摄像头也就是视觉插件:
-
<sensor name='camera' type='camera'>
-
<always_on>1</always_on>
-
<visualize>1</visualize>
-
<update_rate>30</update_rate>
-
<camera name='prius_cam'>
-
<horizontal_fov>1.0856</horizontal_fov>
-
<image>
-
<width>640</width>
-
<height>480</height>
-
<format>R8G8B8</format>
-
</image>
-
<clip>
-
<near>0.03</near>
-
<far>100</far>
-
</clip>
-
<noise>
-
<type>gaussian</type>
-
<mean>0</mean>
-
<stddev>0.007</stddev>
-
</noise>
-
</camera>
-
<plugin name='camera_driver' filename='libgazebo_ros_camera.so'/>
-
</sensor>

launch文件:
-
from launch import LaunchDescription
-
from launch.actions import ExecuteProcess
-
-
-
def generate_launch_description():
-
-
return LaunchDescription([
-
-
ExecuteProcess(
-
cmd=['gazebo', '--verbose', '/home/zhangrelay/ros_ws/prius_line_following/src/world/prius_on_track.world'],
-
output='screen'),
-
-
])
需要用到的一些指令:
- source install/setup.sh
- ros2 launch prius_line_following car_on_track.launch.py
- ros2 topic list
- rqt
如果需要更改赛道和色彩如下:
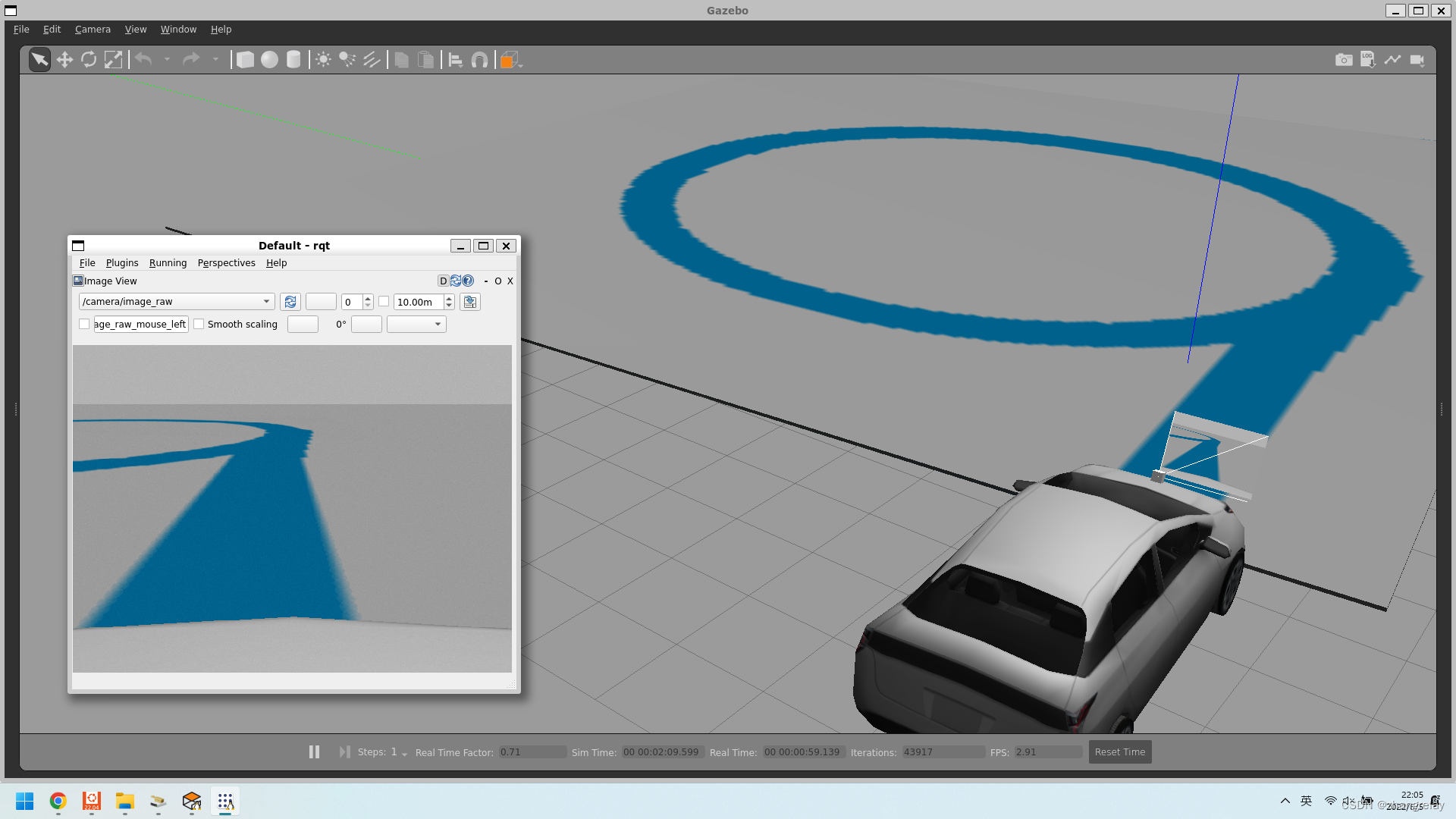
如何实现呢?
当然如果觉得车的颜色也不好看,也可以改:
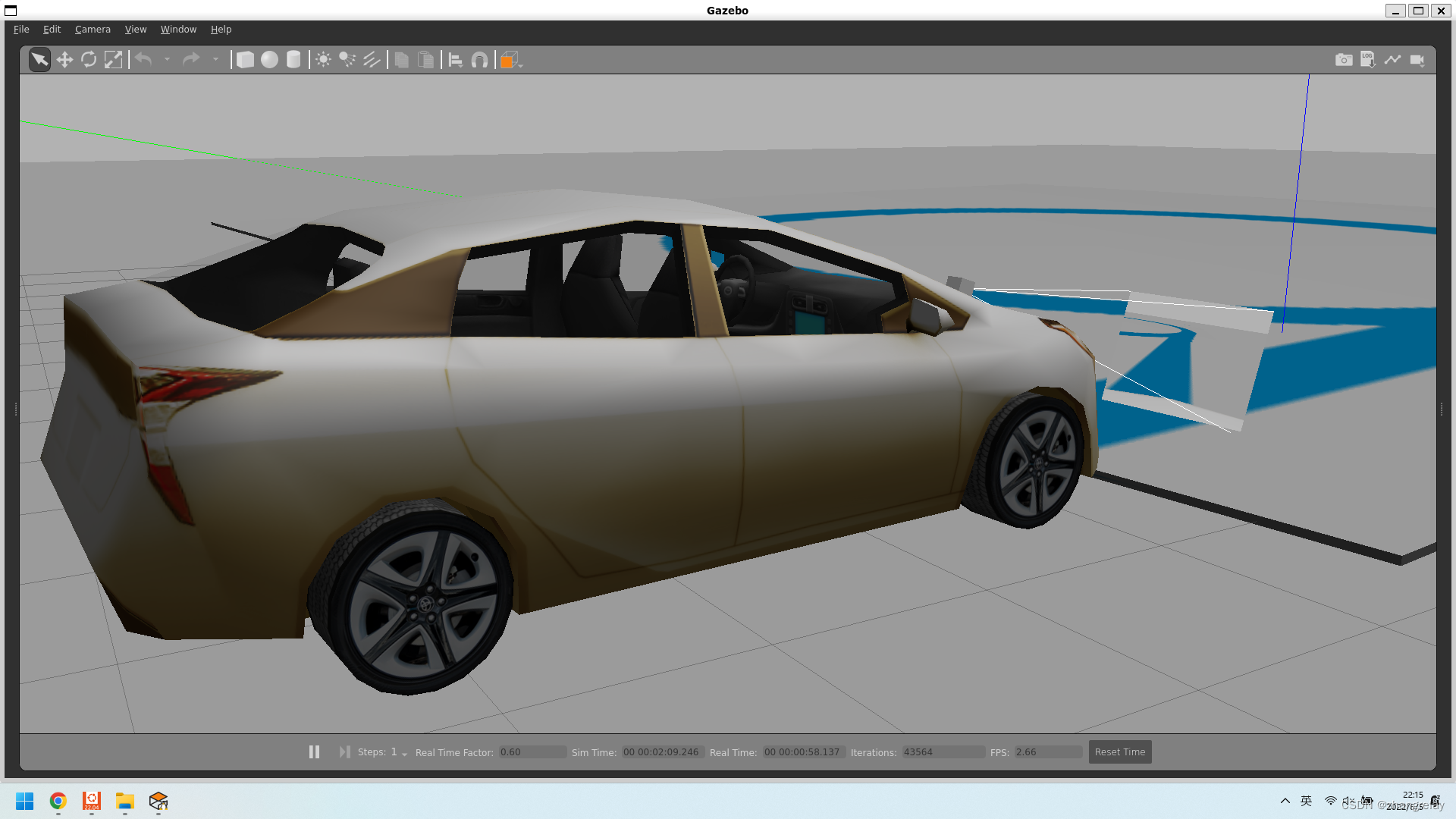
这如何实现?
需要熟练掌握Gazebo11使用,此部分基础ROS1/2差异不大,内容和方法基本通用的。
-^_^-
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/125137224

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)