ROS 2 Humble Hawksbill 图形工具 rqt

【摘要】
rqt包全家福:
ros-humble-rqt-action ros-humble-rqt-image-overlay-dbgsym ros-humble-rqt-robot-dashboardros-humble-rqt-bag ros-humble-rqt-ima...
rqt包全家福:
-
ros-humble-rqt-action ros-humble-rqt-image-overlay-dbgsym ros-humble-rqt-robot-dashboard
-
ros-humble-rqt-bag ros-humble-rqt-image-overlay-layer ros-humble-rqt-robot-monitor
-
ros-humble-rqt-bag-plugins ros-humble-rqt-image-view ros-humble-rqt-robot-steering
-
ros-humble-rqt-common-plugins ros-humble-rqt-image-view-dbgsym ros-humble-rqt-runtime-monitor
-
ros-humble-rqt-console ros-humble-rqt-moveit ros-humble-rqt-service-caller
-
ros-humble-rqt-graph ros-humble-rqt-msg ros-humble-rqt-shell
-
ros-humble-rqt-gui ros-humble-rqt-plot ros-humble-rqt-srv
-
ros-humble-rqt-gui-cpp ros-humble-rqt-publisher ros-humble-rqt-top
-
ros-humble-rqt-gui-cpp-dbgsym ros-humble-rqt-py-common ros-humble-rqt-topic
-
ros-humble-rqt-gui-py ros-humble-rqt-py-console
-
ros-humble-rqt-image-overlay ros-humble-rqt-reconfigure
输入rqt即可使用,全部窗口操作。
简介:rqt 是一个 GUI 框架,能够将各种插件工具加载为可停靠窗口。 当前没有选择插件。 要添加插件,请从插件菜单中选择项目。还可以使用 Perspectives 菜单将插件的特定排列保存为透视图。
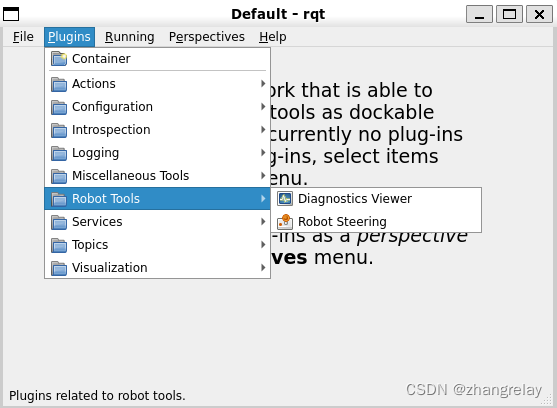
插件有如下:

以concole为例,ROS 2 的记录器级别按严重性排序:
- Fatal
- Error
- Warn
- Info
- Debug
每个级别表示的内容没有确切的标准,但可以安全地假设:
- 致命消息Fatal表明系统将终止以试图保护自己免受损害。
- 错误消息Error表明重大问题不一定会损坏系统,但会阻止系统正常运行。
- 警告消息Warn表示可能代表更深层次问题的意外活动或非理想结果,但不会直接损害功能。
- 信息消息Info指示事件和状态更新,作为系统按预期运行的视觉验证。
- 调试消息Debug详细说明了系统执行的整个逐步过程。
默认级别为信息。 只会看到默认严重级别和更严重级别的消息。
通常,只有 Debug 消息被隐藏,因为它们是唯一没有 Info 严重的级别。 例如,如果将默认级别设置为 Warn,将只能看到严重性为 Warn、Error 和 Fatal 的消息。
例如将小乌龟节点设置级别:
ros2 run turtlesim turtlesim_node --ros-args --log-level WARN
对比如下两段代码分别用Python和C++实现类似功能:
Python
-
import os
-
-
from python_qt_binding.QtCore import qDebug, qWarning
-
from qt_gui.composite_plugin_provider import CompositePluginProvider
-
-
import rclpy
-
from rqt_gui.ros2_plugin_context import Ros2PluginContext
-
from rqt_gui.rospkg_plugin_provider import RospkgPluginProvider
-
from rqt_gui_py.rclpy_spinner import RclpySpinner
-
-
-
class RosPyPluginProvider(CompositePluginProvider):
-
-
def __init__(self):
-
super(RosPyPluginProvider, self).__init__(
-
[RospkgPluginProvider('rqt_gui', 'rqt_gui_py::Plugin')])
-
self.setObjectName('RosPyPluginProvider')
-
self._node_initialized = False
-
self._node = None
-
self._spinner = None
-
self._shutdown_timeout = 2000
-
-
def shutdown(self):
-
qDebug('Shutting down RosPyPluginProvider')
-
if self._spinner:
-
self._spinner.quit()
-
joined = self._spinner.wait(msecs=self._shutdown_timeout)
-
if not joined:
-
qWarning('Timed out attempting to join the RclpySpinner thread')
-
return
-
if self._node:
-
self._destroy_node()
-
super().shutdown()
-
-
def load(self, plugin_id, plugin_context):
-
self._init_node()
-
ros_plugin_context = Ros2PluginContext(handler=plugin_context._handler, node=self._node)
-
-
return super(RosPyPluginProvider, self).load(plugin_id, ros_plugin_context)
-
-
def unload(self, plugin_instance):
-
return super(RosPyPluginProvider, self).unload(plugin_instance)
-
-
def _init_node(self):
-
# initialize node once
-
if not self._node_initialized:
-
name = 'rqt_gui_py_node_%d' % os.getpid()
-
qDebug('RosPyPluginProvider._init_node() initialize ROS node "%s"' % name)
-
if not rclpy.ok():
-
rclpy.init()
-
self._node = rclpy.create_node(name)
-
self._spinner = RclpySpinner(self._node)
-
self._spinner.start()
-
self._node_initialized = True
-
-
def _destroy_node(self):
-
if self._node_initialized:
-
self._node.destroy_node()
-
rclpy.shutdown()
-
self._node_initialized = False
C++
-
#include "roscpp_plugin_provider.h"
-
-
#include "nodelet_plugin_provider.h"
-
#include <rqt_gui_cpp/plugin.h>
-
-
#include <qt_gui_cpp/plugin_provider.h>
-
#include <rclcpp/rclcpp.hpp>
-
-
#include <pluginlib/class_list_macros.hpp>
-
-
#include <stdexcept>
-
#include <sys/types.h>
-
-
namespace rqt_gui_cpp {
-
-
RosCppPluginProvider::RosCppPluginProvider()
-
: qt_gui_cpp::CompositePluginProvider()
-
, rclcpp_initialized_(false)
-
{
-
if (rclcpp::ok())
-
{
-
rclcpp_initialized_ = true;
-
}
-
-
init_rclcpp();
-
QList<PluginProvider*> plugin_providers;
-
plugin_providers.append(new NodeletPluginProvider("rqt_gui", "rqt_gui_cpp::Plugin"));
-
set_plugin_providers(plugin_providers);
-
}
-
-
RosCppPluginProvider::~RosCppPluginProvider()
-
{
-
if (rclcpp::ok())
-
{
-
rclcpp::shutdown();
-
}
-
}
-
-
void* RosCppPluginProvider::load(const QString& plugin_id, qt_gui_cpp::PluginContext* plugin_context)
-
{
-
qDebug("RosCppPluginProvider::load(%s)", plugin_id.toStdString().c_str());
-
init_rclcpp();
-
return qt_gui_cpp::CompositePluginProvider::load(plugin_id, plugin_context);
-
}
-
-
qt_gui_cpp::Plugin* RosCppPluginProvider::load_plugin(const QString& plugin_id, qt_gui_cpp::PluginContext* plugin_context)
-
{
-
qDebug("RosCppPluginProvider::load_plugin(%s)", plugin_id.toStdString().c_str());
-
init_rclcpp();
-
return qt_gui_cpp::CompositePluginProvider::load_plugin(plugin_id, plugin_context);
-
}
-
-
void RosCppPluginProvider::init_rclcpp()
-
{
-
// initialize ROS node once
-
if (!rclcpp_initialized_)
-
{
-
int argc = 0;
-
char** argv = 0;
-
-
// Initialize any global resources needed by the middleware and the client library.
-
// This will also parse command line arguments one day (as of Beta 1 they are not used).
-
// You must call this before using any other part of the ROS system.
-
// This should be called once per process.
-
rclcpp::init(argc, argv);
-
-
-
// Don't do this again in this process
-
rclcpp_initialized_ = true;
-
}
-
}
-
-
}
-
-
PLUGINLIB_EXPORT_CLASS(rqt_gui_cpp::RosCppPluginProvider, qt_gui_cpp::PluginProvider)
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/125004286

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)