ROS 2 Humble Hawksbill 环境基础

安装和使用系统环境如下
支持Ubuntu+Windows等:
其实现在Ubuntu+Windows一家亲,如下,♥。
DDS依据项目需要安装合适版本。
基本上啥都支持,何止ubuntu,移动端很多APP都直接用。
回归主题!ROS2 Humble基础
环境:
Ubuntu source /opt/ros/humble/setup.bash
Windows call C:\dev\ros2\local_setup.bat
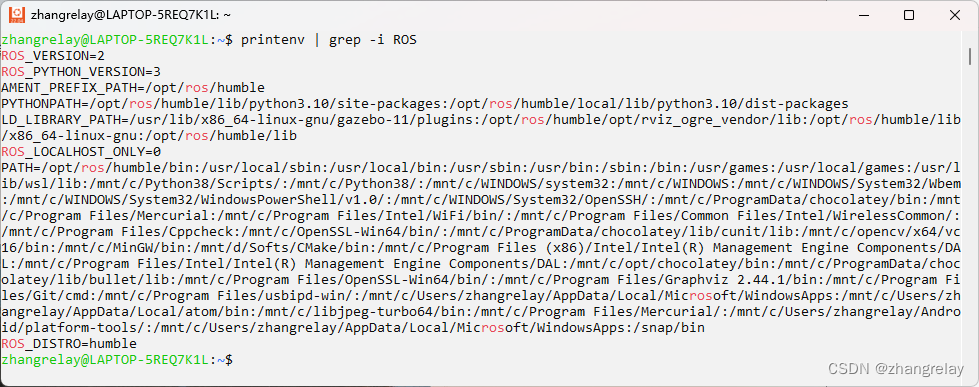
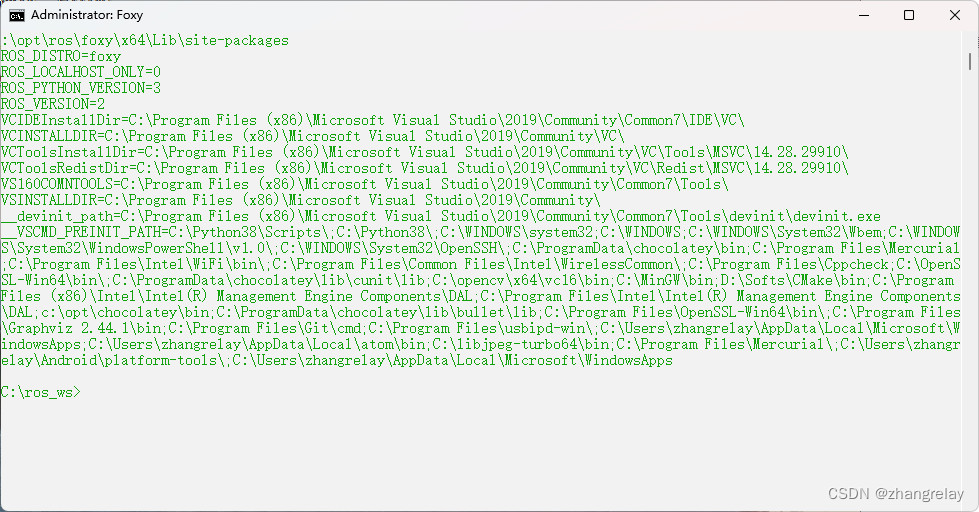
显示环境变量:
U:printenv | grep -i ROS
W:set | findstr -i ROS
设置 ROS_DOMAIN_ID 网络相关
U: export ROS_DOMAIN_ID=<your_domain_id>
W: set ROS_DOMAIN_ID=<your_domain_id>
使用前需要正确配置ROS 2开发环境。 这可以通过两种方式完成:在打开的每个新 shell 中获取设置文件,或者将 source 命令添加到启动脚本中。
如果在定位或使用 ROS 2 软件包时遇到任何问题,应该做的第一件事是检查环境变量并确保它们设置为想要的版本和发行版。
turtlesim
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
如上是ROS2吉祥物全集
ros2 pkg executables turtlesim

重命名
ros2 run turtlesim turtle_teleop_key --ros-args --remap turtle1/cmd_vel:=turtle2/cmd_vel
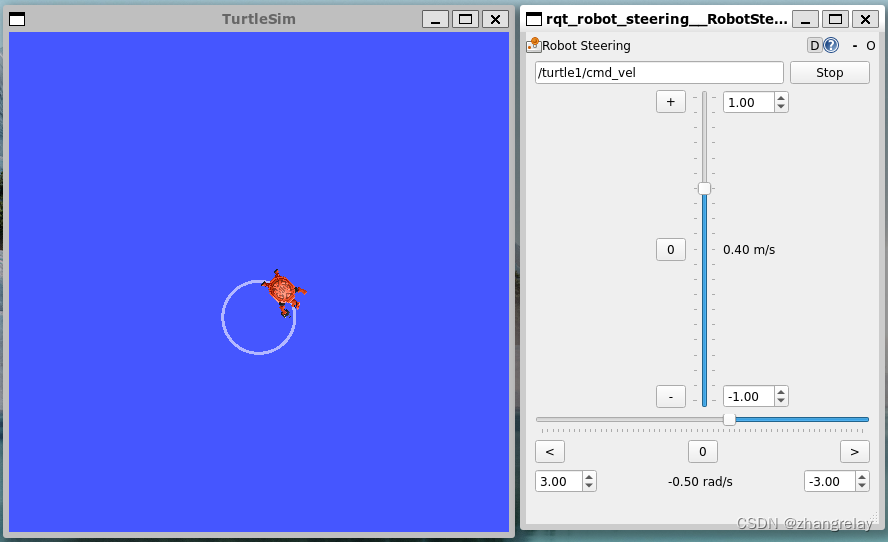
图形化工具rqt
sudo apt install ros-humble-rqt-robot-*
安装包日期220520
Setting up ros-humble-rqt-robot-monitor (1.0.5-2jammy.20220520.023300) ...
Setting up ros-humble-rqt-robot-steering (1.0.0-4jammy.20220520.023302) ...
Setting up ros-humble-rqt-robot-dashboard (0.6.1-3jammy.20220520.023534) ...
zhangrelay@LAPTOP-5REQ7K1L:~$ ros2 run rqt_robot_steering rqt_robot_steering
qt_gui_main() found no plugin matching "rqt_robot_steering.robot_steering.RobotSteering"
try passing the option "--force-discover"
[ros2run]: Process exited with failure 1
zhangrelay@LAPTOP-5REQ7K1L:~$ ros2 run rqt_robot_steering rqt_robot_steering --force-discover
核心功能包,源码地址如下,需要切换为humble:
-
repositories:
-
ament/ament_cmake:
-
type: git
-
url: https://github.com/ament/ament_cmake.git
-
version: master
-
ament/ament_index:
-
type: git
-
url: https://github.com/ament/ament_index.git
-
version: master
-
ament/ament_lint:
-
type: git
-
url: https://github.com/ament/ament_lint.git
-
version: master
-
ament/ament_package:
-
type: git
-
url: https://github.com/ament/ament_package.git
-
version: master
-
ament/google_benchmark_vendor:
-
type: git
-
url: https://github.com/ament/google_benchmark_vendor.git
-
version: main
-
ament/googletest:
-
type: git
-
url: https://github.com/ament/googletest.git
-
version: ros2
-
ament/uncrustify_vendor:
-
type: git
-
url: https://github.com/ament/uncrustify_vendor.git
-
version: master
-
eProsima/Fast-CDR:
-
type: git
-
url: https://github.com/eProsima/Fast-CDR.git
-
version: master
-
eProsima/Fast-DDS:
-
type: git
-
url: https://github.com/eProsima/Fast-DDS.git
-
version: master
-
eProsima/foonathan_memory_vendor:
-
type: git
-
url: https://github.com/eProsima/foonathan_memory_vendor.git
-
version: master
-
eclipse-cyclonedds/cyclonedds:
-
type: git
-
url: https://github.com/eclipse-cyclonedds/cyclonedds.git
-
version: releases/0.9.x
-
eclipse-iceoryx/iceoryx:
-
type: git
-
url: https://github.com/eclipse-iceoryx/iceoryx.git
-
version: release_2.0
-
ignition/ignition_cmake2_vendor:
-
type: git
-
url: https://github.com/ignition-release/ignition_cmake2_vendor.git
-
version: main
-
ignition/ignition_math6_vendor:
-
type: git
-
url: https://github.com/ignition-release/ignition_math6_vendor.git
-
version: main
-
osrf/osrf_pycommon:
-
type: git
-
url: https://github.com/osrf/osrf_pycommon.git
-
version: master
-
osrf/osrf_testing_tools_cpp:
-
type: git
-
url: https://github.com/osrf/osrf_testing_tools_cpp.git
-
version: master
-
ros-perception/image_common:
-
type: git
-
url: https://github.com/ros-perception/image_common.git
-
version: ros2
-
ros-perception/laser_geometry:
-
type: git
-
url: https://github.com/ros-perception/laser_geometry.git
-
version: ros2
-
ros-planning/navigation_msgs:
-
type: git
-
url: https://github.com/ros-planning/navigation_msgs.git
-
version: ros2
-
ros-tooling/keyboard_handler:
-
type: git
-
url: https://github.com/ros-tooling/keyboard_handler.git
-
version: main
-
ros-tooling/libstatistics_collector:
-
type: git
-
url: https://github.com/ros-tooling/libstatistics_collector.git
-
version: master
-
ros-tracing/ros2_tracing:
-
type: git
-
url: https://gitlab.com/ros-tracing/ros2_tracing.git
-
version: master
-
ros-visualization/interactive_markers:
-
type: git
-
url: https://github.com/ros-visualization/interactive_markers.git
-
version: ros2
-
ros-visualization/python_qt_binding:
-
type: git
-
url: https://github.com/ros-visualization/python_qt_binding.git
-
version: main
-
ros-visualization/qt_gui_core:
-
type: git
-
url: https://github.com/ros-visualization/qt_gui_core.git
-
version: main
-
ros-visualization/rqt:
-
type: git
-
url: https://github.com/ros-visualization/rqt.git
-
version: ros2
-
ros-visualization/rqt_action:
-
type: git
-
url: https://github.com/ros-visualization/rqt_action.git
-
version: ros2
-
ros-visualization/rqt_bag:
-
type: git
-
url: https://github.com/ros-visualization/rqt_bag.git
-
version: ros2
-
ros-visualization/rqt_console:
-
type: git
-
url: https://github.com/ros-visualization/rqt_console.git
-
version: ros2
-
ros-visualization/rqt_graph:
-
type: git
-
url: https://github.com/ros-visualization/rqt_graph.git
-
version: galactic-devel
-
ros-visualization/rqt_msg:
-
type: git
-
url: https://github.com/ros-visualization/rqt_msg.git
-
version: foxy-devel
-
ros-visualization/rqt_plot:
-
type: git
-
url: https://github.com/ros-visualization/rqt_plot.git
-
version: foxy-devel
-
ros-visualization/rqt_publisher:
-
type: git
-
url: https://github.com/ros-visualization/rqt_publisher.git
-
version: foxy-devel
-
ros-visualization/rqt_py_console:
-
type: git
-
url: https://github.com/ros-visualization/rqt_py_console.git
-
version: crystal-devel
-
ros-visualization/rqt_reconfigure:
-
type: git
-
url: https://github.com/ros-visualization/rqt_reconfigure.git
-
version: dashing
-
ros-visualization/rqt_service_caller:
-
type: git
-
url: https://github.com/ros-visualization/rqt_service_caller.git
-
version: crystal-devel
-
ros-visualization/rqt_shell:
-
type: git
-
url: https://github.com/ros-visualization/rqt_shell.git
-
version: crystal-devel
-
ros-visualization/rqt_srv:
-
type: git
-
url: https://github.com/ros-visualization/rqt_srv.git
-
version: crystal-devel
-
ros-visualization/rqt_topic:
-
type: git
-
url: https://github.com/ros-visualization/rqt_topic.git
-
version: foxy-devel
-
ros-visualization/tango_icons_vendor:
-
type: git
-
url: https://github.com/ros-visualization/tango_icons_vendor.git
-
version: master
-
ros/class_loader:
-
type: git
-
url: https://github.com/ros/class_loader.git
-
version: ros2
-
ros/kdl_parser:
-
type: git
-
url: https://github.com/ros/kdl_parser.git
-
version: ros2
-
ros/pluginlib:
-
type: git
-
url: https://github.com/ros/pluginlib.git
-
version: ros2
-
ros/resource_retriever:
-
type: git
-
url: https://github.com/ros/resource_retriever.git
-
version: ros2
-
ros/robot_state_publisher:
-
type: git
-
url: https://github.com/ros/robot_state_publisher.git
-
version: ros2
-
ros/ros_environment:
-
type: git
-
url: https://github.com/ros/ros_environment.git
-
version: rolling
-
ros/ros_tutorials:
-
type: git
-
url: https://github.com/ros/ros_tutorials.git
-
version: rolling-devel
-
ros/urdfdom:
-
type: git
-
url: https://github.com/ros/urdfdom.git
-
version: master
-
ros/urdfdom_headers:
-
type: git
-
url: https://github.com/ros/urdfdom_headers.git
-
version: master
-
ros2/ament_cmake_ros:
-
type: git
-
url: https://github.com/ros2/ament_cmake_ros.git
-
version: master
-
ros2/common_interfaces:
-
type: git
-
url: https://github.com/ros2/common_interfaces.git
-
version: master
-
ros2/console_bridge_vendor:
-
type: git
-
url: https://github.com/ros2/console_bridge_vendor.git
-
version: master
-
ros2/demos:
-
type: git
-
url: https://github.com/ros2/demos.git
-
version: master
-
ros2/eigen3_cmake_module:
-
type: git
-
url: https://github.com/ros2/eigen3_cmake_module.git
-
version: master
-
ros2/example_interfaces:
-
type: git
-
url: https://github.com/ros2/example_interfaces.git
-
version: master
-
ros2/examples:
-
type: git
-
url: https://github.com/ros2/examples.git
-
version: master
-
ros2/geometry2:
-
type: git
-
url: https://github.com/ros2/geometry2.git
-
version: ros2
-
ros2/launch:
-
type: git
-
url: https://github.com/ros2/launch.git
-
version: master
-
ros2/launch_ros:
-
type: git
-
url: https://github.com/ros2/launch_ros.git
-
version: master
-
ros2/libyaml_vendor:
-
type: git
-
url: https://github.com/ros2/libyaml_vendor.git
-
version: master
-
ros2/message_filters:
-
type: git
-
url: https://github.com/ros2/message_filters.git
-
version: master
-
ros2/mimick_vendor:
-
type: git
-
url: https://github.com/ros2/mimick_vendor.git
-
version: master
-
ros2/orocos_kdl_vendor:
-
type: git
-
url: https://github.com/ros2/orocos_kdl_vendor.git
-
version: main
-
ros2/performance_test_fixture:
-
type: git
-
url: https://github.com/ros2/performance_test_fixture.git
-
version: main
-
ros2/pybind11_vendor:
-
type: git
-
url: https://github.com/ros2/pybind11_vendor.git
-
version: master
-
ros2/python_cmake_module:
-
type: git
-
url: https://github.com/ros2/python_cmake_module.git
-
version: master
-
ros2/rcl:
-
type: git
-
url: https://github.com/ros2/rcl.git
-
version: master
-
ros2/rcl_interfaces:
-
type: git
-
url: https://github.com/ros2/rcl_interfaces.git
-
version: master
-
ros2/rcl_logging:
-
type: git
-
url: https://github.com/ros2/rcl_logging.git
-
version: master
-
ros2/rclcpp:
-
type: git
-
url: https://github.com/ros2/rclcpp.git
-
version: master
-
ros2/rclpy:
-
type: git
-
url: https://github.com/ros2/rclpy.git
-
version: master
-
ros2/rcpputils:
-
type: git
-
url: https://github.com/ros2/rcpputils.git
-
version: master
-
ros2/rcutils:
-
type: git
-
url: https://github.com/ros2/rcutils.git
-
version: master
-
ros2/realtime_support:
-
type: git
-
url: https://github.com/ros2/realtime_support.git
-
version: master
-
ros2/rmw:
-
type: git
-
url: https://github.com/ros2/rmw.git
-
version: master
-
ros2/rmw_connextdds:
-
type: git
-
url: https://github.com/ros2/rmw_connextdds.git
-
version: master
-
ros2/rmw_cyclonedds:
-
type: git
-
url: https://github.com/ros2/rmw_cyclonedds.git
-
version: master
-
ros2/rmw_dds_common:
-
type: git
-
url: https://github.com/ros2/rmw_dds_common.git
-
version: master
-
ros2/rmw_fastrtps:
-
type: git
-
url: https://github.com/ros2/rmw_fastrtps.git
-
version: master
-
ros2/rmw_implementation:
-
type: git
-
url: https://github.com/ros2/rmw_implementation.git
-
version: master
-
ros2/ros2cli:
-
type: git
-
url: https://github.com/ros2/ros2cli.git
-
version: master
-
ros2/ros2cli_common_extensions:
-
type: git
-
url: https://github.com/ros2/ros2cli_common_extensions.git
-
version: master
-
ros2/ros_testing:
-
type: git
-
url: https://github.com/ros2/ros_testing.git
-
version: master
-
ros2/rosbag2:
-
type: git
-
url: https://github.com/ros2/rosbag2.git
-
version: master
-
ros2/rosidl:
-
type: git
-
url: https://github.com/ros2/rosidl.git
-
version: master
-
ros2/rosidl_dds:
-
type: git
-
url: https://github.com/ros2/rosidl_dds.git
-
version: master
-
ros2/rosidl_defaults:
-
type: git
-
url: https://github.com/ros2/rosidl_defaults.git
-
version: master
-
ros2/rosidl_python:
-
type: git
-
url: https://github.com/ros2/rosidl_python.git
-
version: master
-
ros2/rosidl_runtime_py:
-
type: git
-
url: https://github.com/ros2/rosidl_runtime_py.git
-
version: master
-
ros2/rosidl_typesupport:
-
type: git
-
url: https://github.com/ros2/rosidl_typesupport.git
-
version: master
-
ros2/rosidl_typesupport_fastrtps:
-
type: git
-
url: https://github.com/ros2/rosidl_typesupport_fastrtps.git
-
version: master
-
ros2/rpyutils:
-
type: git
-
url: https://github.com/ros2/rpyutils.git
-
version: master
-
ros2/rviz:
-
type: git
-
url: https://github.com/ros2/rviz.git
-
version: ros2
-
ros2/spdlog_vendor:
-
type: git
-
url: https://github.com/ros2/spdlog_vendor.git
-
version: master
-
ros2/sros2:
-
type: git
-
url: https://github.com/ros2/sros2.git
-
version: master
-
ros2/system_tests:
-
type: git
-
url: https://github.com/ros2/system_tests.git
-
version: master
-
ros2/test_interface_files:
-
type: git
-
url: https://github.com/ros2/test_interface_files.git
-
version: master
-
ros2/tinyxml2_vendor:
-
type: git
-
url: https://github.com/ros2/tinyxml2_vendor.git
-
version: master
-
ros2/tinyxml_vendor:
-
type: git
-
url: https://github.com/ros2/tinyxml_vendor.git
-
version: master
-
ros2/tlsf:
-
type: git
-
url: https://github.com/ros2/tlsf.git
-
version: master
-
ros2/unique_identifier_msgs:
-
type: git
-
url: https://github.com/ros2/unique_identifier_msgs.git
-
version: master
-
ros2/urdf:
-
type: git
-
url: https://github.com/ros2/urdf.git
-
version: ros2
-
ros2/yaml_cpp_vendor:
-
type: git
-
url: https://github.com/ros2/yaml_cpp_vendor.git
-
version: master
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/124988173

- 点赞
- 收藏
- 关注作者
评论(0)