python+openCV实现双目视差图及测距

【摘要】
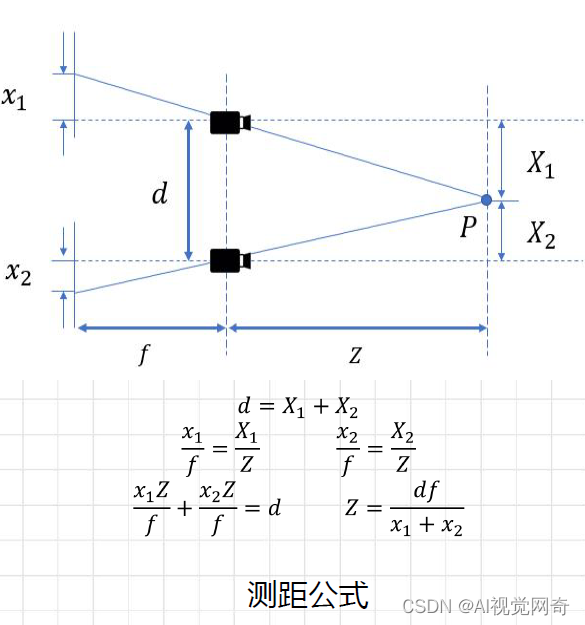
测距公式:
这篇博文也比较详细:
使用OpenCV/python进行双目测距 - 走看看
通过matlab标定得到相机参数放到stereoconfig.py
import numpy as npimport cv2 #双目相机参数class stereoCameral(object): def __...
测距公式:
这篇博文也比较详细:
通过matlab标定得到相机参数放到stereoconfig.py
-
import numpy as np
-
import cv2
-
-
#双目相机参数
-
class stereoCameral(object):
-
def __init__(self):
-
-
#左相机内参数
-
self.cam_matrix_left = np.array([[249.82379, 0., 156.38459], [0., 249.07678, 122.46872], [0., 0., 1.]])
-
#右相机内参数
-
self.cam_matrix_right = np.array([[242.77875, 0., 153.22330], [0., 242.27426, 117.63536], [0., 0., 1.]])
-
-
#左右相机畸变系数:[k1, k2, p1, p2, k3]
-
self.distortion_l = np.array([[-0.02712, -0.03795, -0.00409, 0.00526, 0.00000]])
-
self.distortion_r = np.array([[-0.03348, 0.08901, -0.00327, 0.00330, 0.00000]])
-
-
#旋转矩阵
-
om = np.array([-0.00320, -0.00163, -0.00069])
-
self.R = cv2.Rodrigues(om)[0] # 使用Rodrigues变换将om变换为R
-
#平移矩阵
-
self.T = np.array([-90.24602, 3.17981, -19.44558])
视差图及三维坐标
-
import cv2
-
import numpy as np
-
import stereoconfig
-
-
def getRectifyTransform(height, width, config):
-
#读取矩阵参数
-
left_K = config.cam_matrix_left
-
right_K = config.cam_matrix_right
-
left_distortion = config.distortion_l
-
right_distortion = config.distortion_r
-
R = config.R
-
T = config.T
-
-
#计算校正变换
-
if type(height) != "int" or type(width) != "int":
-
height = int(height)
-
width = int(width)
-
R1, R2, P1, P2, Q, roi1, roi2 = cv2.stereoRectify(left_K, left_distortion, right_K, right_distortion,
-
(width, height), R, T, alpha=0)
-
map1x, map1y = cv2.initUndistortRectifyMap(left_K, left_distortion, R1, P1, (width, height), cv2.CV_32FC1)
-
map2x, map2y = cv2.initUndistortRectifyMap(right_K, right_distortion, R2, P2, (width, height), cv2.CV_32FC1)
-
-
return map1x, map1y, map2x, map2y, Q
-
-
# 畸变校正和立体校正
-
def rectifyImage(image1, image2, map1x, map1y, map2x, map2y):
-
rectifyed_img1 = cv2.remap(image1, map1x, map1y, cv2.INTER_AREA)
-
rectifyed_img2 = cv2.remap(image2, map2x, map2y, cv2.INTER_AREA)
-
return rectifyed_img1, rectifyed_img2
-
-
#视差计算
-
def sgbm(imgL, imgR):
-
#SGBM参数设置
-
blockSize = 8
-
img_channels = 3
-
stereo = cv2.StereoSGBM_create(minDisparity = 1,
-
numDisparities = 64,
-
blockSize = blockSize,
-
P1 = 8 * img_channels * blockSize * blockSize,
-
P2 = 32 * img_channels * blockSize * blockSize,
-
disp12MaxDiff = -1,
-
preFilterCap = 1,
-
uniquenessRatio = 10,
-
speckleWindowSize = 100,
-
speckleRange = 100,
-
mode = cv2.STEREO_SGBM_MODE_HH)
-
# 计算视差图
-
disp = stereo.compute(imgL, imgR)
-
disp = np.divide(disp.astype(np.float32), 16.)#除以16得到真实视差图
-
return disp
-
#计算三维坐标,并删除错误点
-
def threeD(disp, Q):
-
# 计算像素点的3D坐标(左相机坐标系下)
-
points_3d = cv2.reprojectImageTo3D(disp, Q)
-
-
points_3d = points_3d.reshape(points_3d.shape[0] * points_3d.shape[1], 3)
-
-
X = points_3d[:, 0]
-
Y = points_3d[:, 1]
-
Z = points_3d[:, 2]
-
-
#选择并删除错误的点
-
remove_idx1 = np.where(Z <= 0)
-
remove_idx2 = np.where(Z > 15000)
-
remove_idx3 = np.where(X > 10000)
-
remove_idx4 = np.where(X < -10000)
-
remove_idx5 = np.where(Y > 10000)
-
remove_idx6 = np.where(Y < -10000)
-
remove_idx = np.hstack(
-
(remove_idx1[0], remove_idx2[0], remove_idx3[0], remove_idx4[0], remove_idx5[0], remove_idx6[0]))
-
-
points_3d = np.delete(points_3d, remove_idx, 0)
-
-
#计算目标点(这里我选择的是目标区域的中位数,可根据实际情况选取)
-
if points_3d.any():
-
x = np.median(points_3d[:, 0])
-
y = np.median(points_3d[:, 1])
-
z = np.median(points_3d[:, 2])
-
targetPoint = [x, y, z]
-
else:
-
targetPoint = [0, 0, -1]#无法识别目标区域
-
-
return targetPoint
-
-
-
imgL = cv2.imread("_left.jpg")
-
imgR = cv2.imread("_right.jpg")
-
-
height, width = imgL.shape[0:2]
-
# 读取相机内参和外参
-
config = stereoconfig.stereoCameral()
-
-
map1x, map1y, map2x, map2y, Q = getRectifyTransform(height, width, config)
-
iml_rectified, imr_rectified = rectifyImage(imgL, imgR, map1x, map1y, map2x, map2y)
-
-
disp = sgbm(iml_rectified, imr_rectified)
-
cv2.imshow("disp", disp)
-
target_point = threeD(disp, Q)#计算目标点的3D坐标(左相机坐标系下)
-
print(target_point)


结果:
文章来源: blog.csdn.net,作者:AI视觉网奇,版权归原作者所有,如需转载,请联系作者。
原文链接:blog.csdn.net/jacke121/article/details/124928816

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)