实验6 蓝桥ROS1使用moveit 适用kinetic/melodic/noetic

【摘要】
此部分案例可以用工业机器人相关实验路径规划替代。
ROS-Industrial 发行版包含六个主流工业供应商的元包,更多信息可以在支持的硬件页面上找到。
ABBFanucKuka MotomanRobotiqUniversal Robots
wiki.ros.org/Industrial
以ABB为例:
2016 ☞ ...
此部分案例可以用工业机器人相关实验路径规划替代。
ROS-Industrial 发行版包含六个主流工业供应商的元包,更多信息可以在支持的硬件页面上找到。
- ABB
- Fanuc
- Kuka
- Motoman
- Robotiq
- Universal Robots
wiki.ros.org/Industrial
以ABB为例:
内容:机械臂、体系结构、简单运动规划、抓取放置任务
记录:
安装moveit等功能包:
- sudo apt install ros-kinetic-moveit*
- sudo apt install ros-kinetic-abb*
- sudo apt install ros-kinetic-ur-e-gazebo ros-kinetic-ur-e-description
此处依据需要安装。
- ABB
- Fanuc
- Kuka
- Motoman
- Robotiq
- Universal Robots
都有对应安装包。
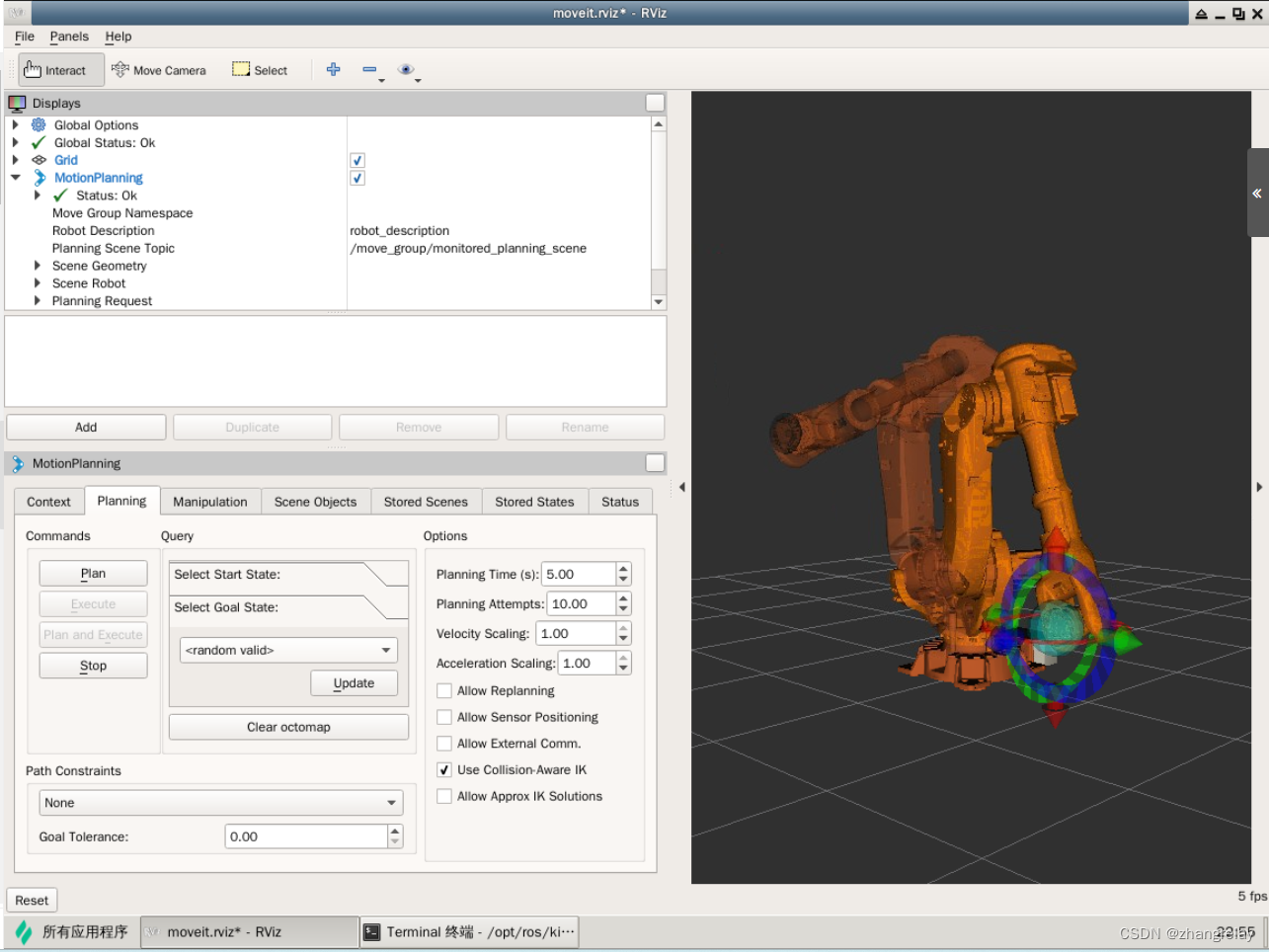
roslaunch abb_irb2400_moveit_config demo.launch



roslaunch abb_irb6640_moveit_config demo.launch

思考:
1. 尝试加载多种工业机器人模型;
2. 使用其他仿真工具如下:
1 gedit ros.asc
2 sudo apt-key add ros.asc
3 sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
4 sudo apt update
5 sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
6 sudo apt update
7 sudo apt install ros-kinetic-moveit*
8 sudo apt install ros-kinetic-abb*
9 sudo apt install ros-kinetic-ur-e-gazebo ros-kinetic-ur-e-description
10 history
11 roslaunch ur_e_gazebo ur3e.launch
12 sudo apt upgrade
13 sudo apt update
14 sudo apt upgrade
15 roslaunch ur_e_gazebo ur3e.launch
16 roslaunch abb_irb2400_moveit_config warehouse.launch
17 roslaunch abb_irb2400_moveit_config demo.launch
18 history
19 roslaunch abb_irb6640_moveit_config demo.launch
20 roslaunch ur_e_description ur5e_upload.launch
21 rviz
22 roslaunch ur_e_description view_ur10e.launch
23 roslaunch ur_e_description view_ur5e.launch
24 roslaunch pr2_moveit_config demo.launch
25 roslaunch pr2_moveit_config setup_assistant.launch
26 history
27 roslaunch abb_irb4400_support robot_state_visualize_irb4400l_30_243.launch
28 roslaunch ur_e_gazebo ur3e_joint_limited.launch
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/124831525

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)