实验1 蓝桥ROS1机器人入门 适用kinetic/melodic/noetic

要求:
ROS1基本安装操作和环境配置。
环境:
www.lanqiao.cn/courses/854
记录:
1. 熟悉终端:

双击打开,并使用。
当输入正确指令,会有相应反馈结果;不正确指令,会报错。
例如:time,date
-
shiyanlou:~/ $ time [8:32:44]
-
shell 0.65s user 0.34s system 16% cpu 5.956 total
-
children 0.09s user 0.06s system 2% cpu 5.956 total
-
shiyanlou:~/ $ data [8:32:48]
-
zsh: command not found: data
-
shiyanlou:~/ $ date [8:32:53]
-
2022\u5e74 05\u6708 13\u65e5 \u661f\u671f\u4e94 08:32:58 CST
-
shiyanlou:~/ $
如上快捷操作不可用,会被浏览器截获,而非云实践环境中打开终端。
ROS安装:
sudo apt install ros-kinetic-desktop-full
已安装功能包,具体时间:20190220
目前时间:20220513,最好升级。
ROS升级:
sudo apt update
更新报错
修正ros.asc:
-
-----BEGIN PGP PUBLIC KEY BLOCK-----
-
Version: GnuPG v1
-
-
mQINBFzvJpYBEADY8l1YvO7iYW5gUESyzsTGnMvVUmlV3XarBaJz9bGRmgPXh7jc
-
VFrQhE0L/HV7LOfoLI9H2GWYyHBqN5ERBlcA8XxG3ZvX7t9nAZPQT2Xxe3GT3tro
-
u5oCR+SyHN9xPnUwDuqUSvJ2eqMYb9B/Hph3OmtjG30jSNq9kOF5bBTk1hOTGPH4
-
K/AY0jzT6OpHfXU6ytlFsI47ZKsnTUhipGsKucQ1CXlyirndZ3V3k70YaooZ55rG
-
aIoAWlx2H0J7sAHmqS29N9jV9mo135d+d+TdLBXI0PXtiHzE9IPaX+ctdSUrPnp+
-
TwR99lxglpIG6hLuvOMAaxiqFBB/Jf3XJ8OBakfS6nHrWH2WqQxRbiITl0irkQoz
-
pwNEF2Bv0+Jvs1UFEdVGz5a8xexQHst/RmKrtHLct3iOCvBNqoAQRbvWvBhPjO/p
-
V5cYeUljZ5wpHyFkaEViClaVWqa6PIsyLqmyjsruPCWlURLsQoQxABcL8bwxX7UT
-
hM6CtH6tGlYZ85RIzRifIm2oudzV5l+8oRgFr9yVcwyOFT6JCioqkwldW52P1pk/
-
/SnuexC6LYqqDuHUs5NnokzzpfS6QaWfTY5P5tz4KHJfsjDIktly3mKVfY0fSPVV
-
okdGpcUzvz2hq1fqjxB6MlB/1vtk0bImfcsoxBmF7H+4E9ZN1sX/tSb0KQARAQAB
-
tCZPcGVuIFJvYm90aWNzIDxpbmZvQG9zcmZvdW5kYXRpb24ub3JnPokCVAQTAQgA
-
PgIbAwULCQgHAgYVCgkICwIEFgIDAQIeAQIXgBYhBMHPbjHmut6IaLFytPQu1vur
-
F8ZUBQJgsdhRBQkLTMW7AAoJEPQu1vurF8ZUTMwP/3f7EkOPIFjUdRmpNJ2db4iB
-
RQu5b2SJRG+KIdbvQBzKUBMV6/RUhEDPjhXZI3zDevzBewvAMKkqs2Q1cWo9WV7Z
-
PyTkvSyey/Tjn+PozcdvzkvrEjDMftIk8E1WzLGq7vnPLZ1q/b6Vq4H373Z+EDWa
-
DaDwW72CbCBLWAVtqff80CwlI2x8fYHKr3VBUnwcXNHR4+nRABfAWnaU4k+oTshC
-
Qucsd8vitNfsSXrKuKyz91IRHRPnJjx8UvGU4tRGfrHkw1505EZvgP02vXeRyWBR
-
fKiL1vGy4tCSRDdZO3ms2J2m08VPv65HsHaWYMnO+rNJmMZj9d9JdL/9GRf5F6U0
-
quoIFL39BhUEvBynuqlrqistnyOhw8W/IQy/ymNzBMcMz6rcMjMwhkgm/LNXoSD1
-
1OrJu4ktQwRhwvGVarnB8ihwjsTxZFylaLmFSfaA+OAlOqCLS1OkIVMzjW+Ul6A6
-
qjiCEUOsnlf4CGlhzNMZOx3low6ixzEqKOcfECpeIj80a2fBDmWkcAAjlHu6VBhA
-
TUDG9e2xKLzV2Z/DLYsb3+n9QW7KO0yZKfiuUo6AYboAioQKn5jh3iRvjGh2Ujpo
-
22G+oae3PcCc7G+z12j6xIY709FQuA49dA2YpzMda0/OX4LP56STEveDRrO+CnV6
-
WE+F5FaIKwb72PL4rLi4
-
=i0tj
-
-----END PGP PUBLIC KEY BLOCK-----
sudo apt-key add ros.asc
终端显示ok。
-
shiyanlou:~/ $ sudo apt-key add ros.asc [8:42:07]
-
OK
再次升级即可。
更新特定功能包,如ros-kinetic-desktop-full。
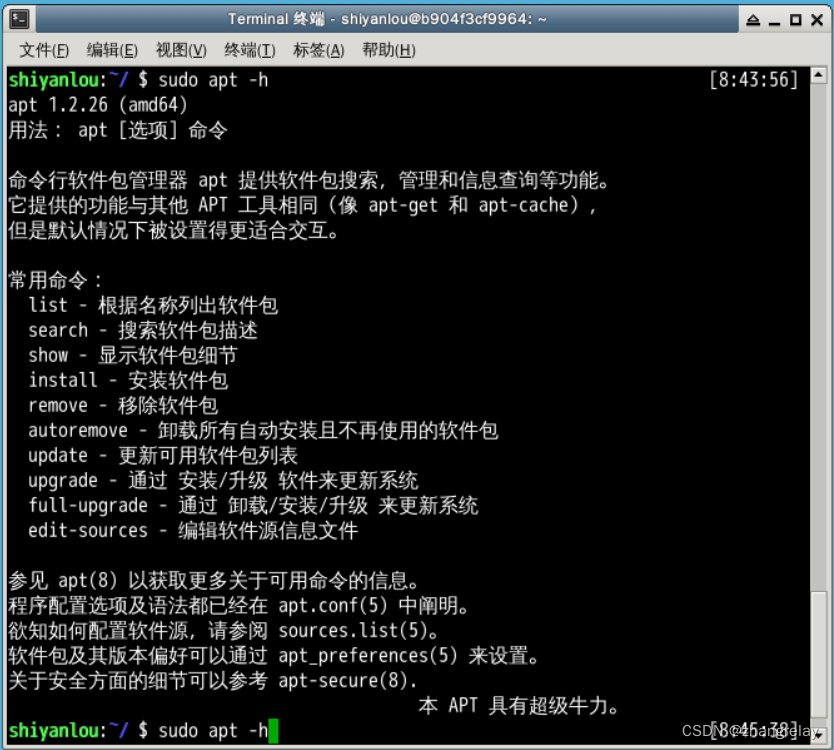
如果遇到不会的指令,使用help。
例如:
sudo apt -h
使用install,再试一次:
sudo apt install ros-kinetic-desktop-full
功能包更新如下:
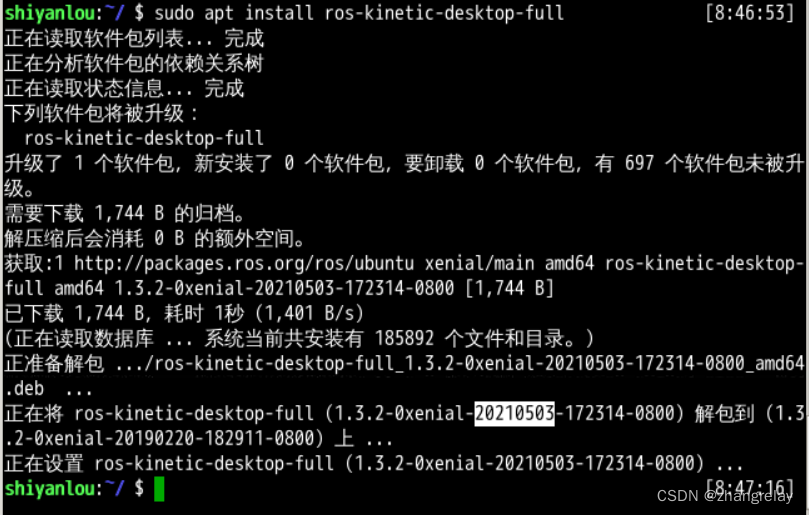
已经由2019版本更新到2021版本。
rosdep:
操作指令还有挺多的,如下:
rosdep初始化:sudo rosdep init
rosdep更新:rosdep update
包括ROS官网全部指令都可以实验,依据情况自主实验。
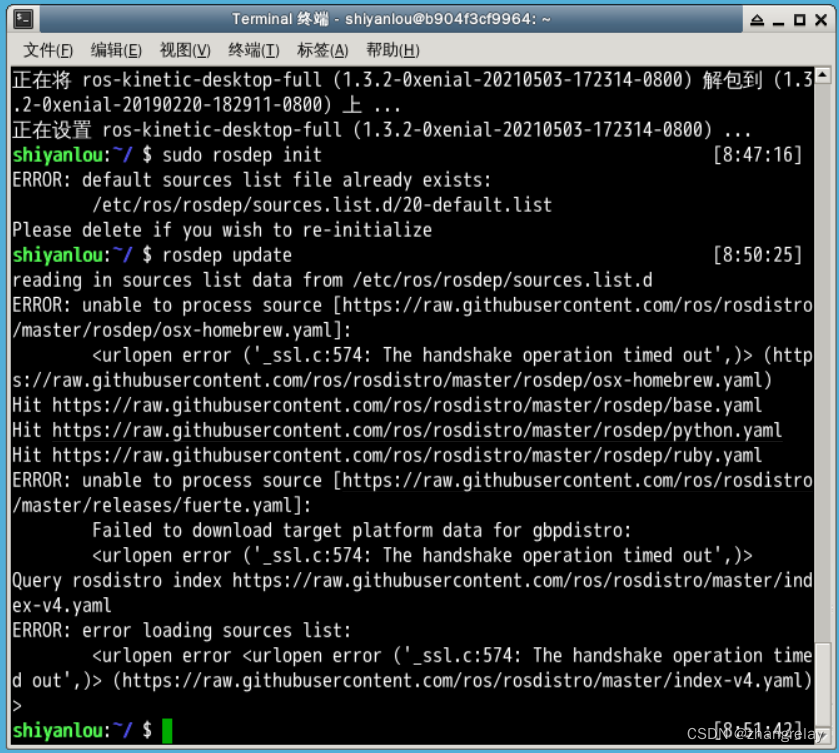
由于服务器不稳定,会经常出错。
ROS配置:
ros1:source /opt/ros/kinetic/setup.zsh
ros2:source /opt/ros/ardent/setup.zsh
一个终端只能选择一个ros。
思考:
1. 部分指令不兼容
依据报错信息排查错误
2. 命令陌生不清楚具体使用
多用自带help,在对应命令后加上 -h
掌握高效率的学习方法非常重要。
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/124744564

- 点赞
- 收藏
- 关注作者
评论(0)