ROS2机器人案例学习linorobot2机器人模型

ROS2之G/F版本支持较多的机器人为turtlebot3和即将发布的turtlebot4:
turtlebot4+树莓派4+ros2专属机器人 2022
ros@ros:~$ sudo apt install ros-noetic-
Display all 2587 possibilities? (y or n)
ros@ros:~$ sudo apt install ros-galactic-
Display all 1323 possibilities? (y or n)
ros@ros:~$ sudo apt install ros-foxy-
Display all 1517 possibilities? (y or n)
如果学习导航包,并且想自己从零起步搞定一款机器人,可以参考:
linorobot2,如下引用

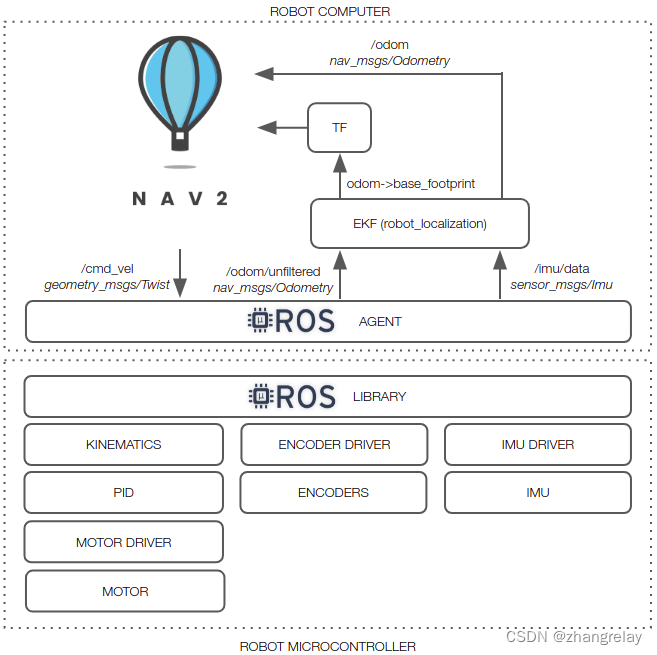
编译完成即可学习机器人模型/SLAM/导航等。
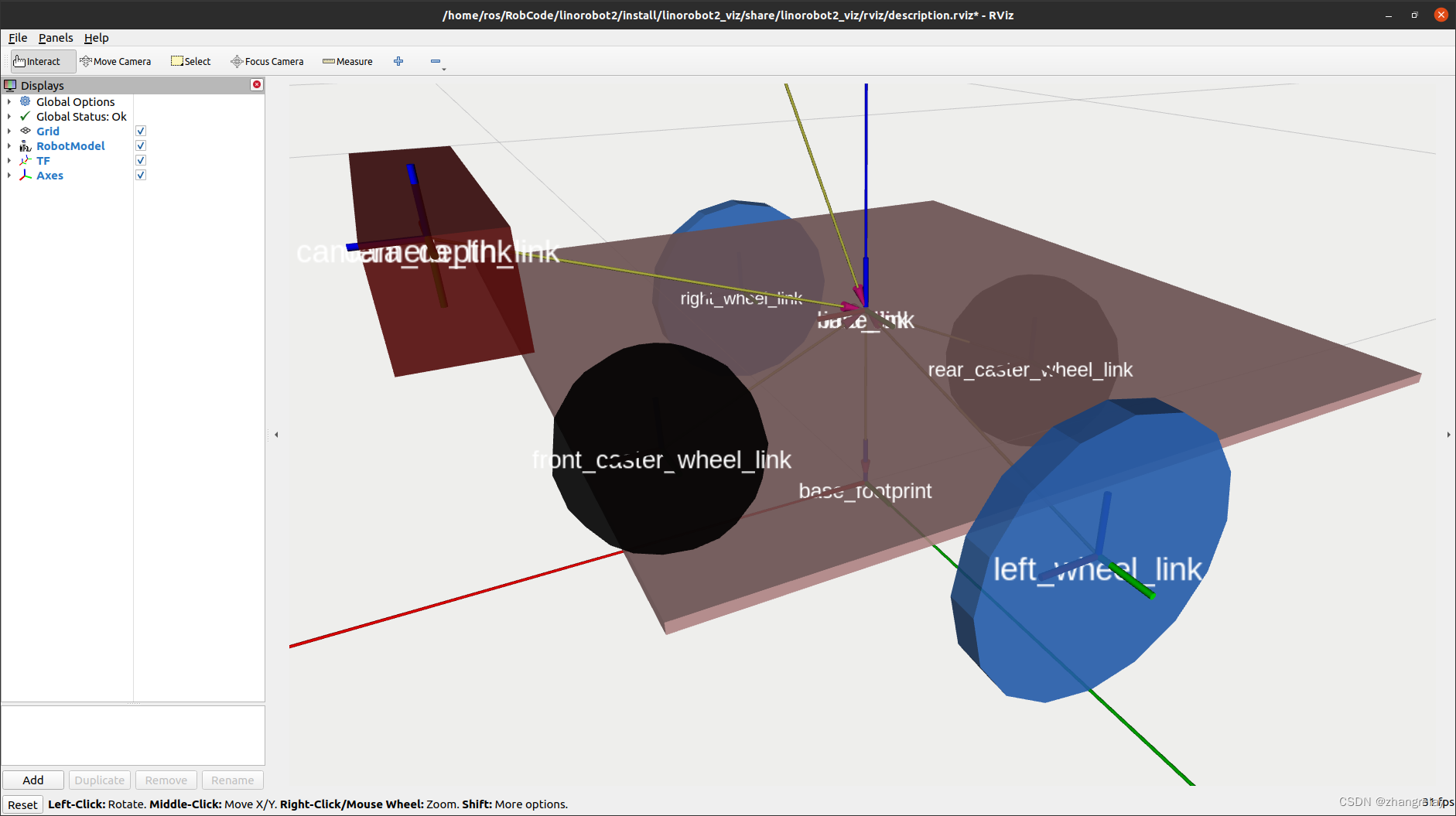
export LINOROBOT2_BASE=2wd
ros2 launch linorobot2_description description.launch.py
ros2 launch linorobot2_viz robot_model.launch.py
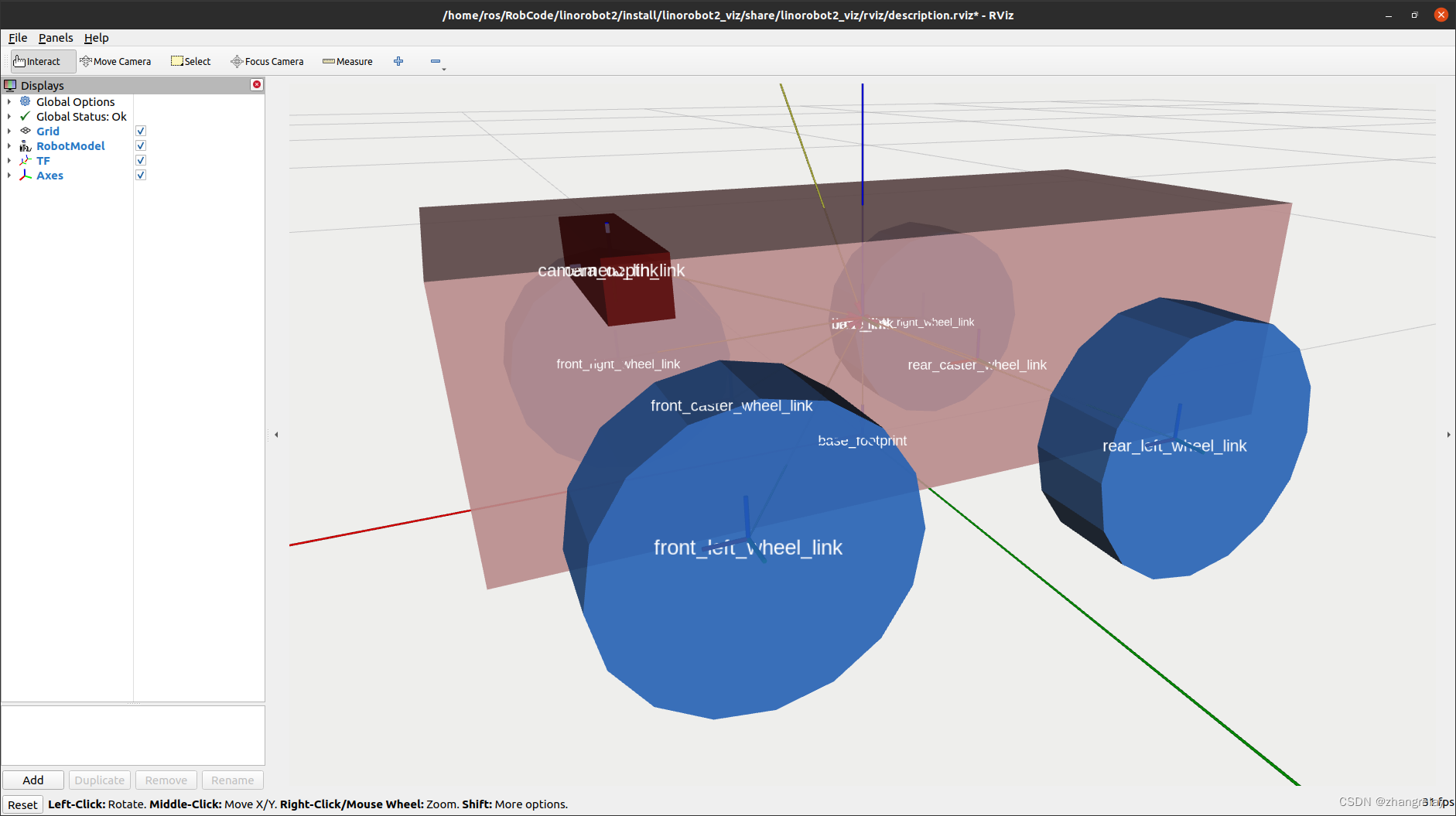
export LINOROBOT2_BASE=mecanum
ros2 launch linorobot2_description description.launch.py
ros2 launch linorobot2_viz robot_model.launch.py
Gazebo:
ros2 launch linorobot2_gazebo gazebo.launch.py


这部分没什么代码就是一个启动配置。引用自源码:
-
# Copyright (c) 2021 Juan Miguel Jimeno
-
#
-
# Licensed under the Apache License, Version 2.0 (the "License");
-
# you may not use this file except in compliance with the License.
-
# You may obtain a copy of the License at
-
#
-
# http:#www.apache.org/licenses/LICENSE-2.0
-
#
-
# Unless required by applicable law or agreed to in writing, software
-
# distributed under the License is distributed on an "AS IS" BASIS,
-
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-
# See the License for the specific language governing permissions and
-
# limitations under the License.
-
-
import os
-
from launch import LaunchDescription
-
from launch.actions import DeclareLaunchArgument, ExecuteProcess, IncludeLaunchDescription
-
from launch.substitutions import LaunchConfiguration, Command, PathJoinSubstitution
-
from launch.launch_description_sources import PythonLaunchDescriptionSource
-
from launch_ros.actions import Node
-
from launch_ros.substitutions import FindPackageShare
-
-
-
def generate_launch_description():
-
use_sim_time = True
-
-
joy_launch_path = PathJoinSubstitution(
-
[FindPackageShare('linorobot2_bringup'), 'launch', 'joy_teleop.launch.py']
-
)
-
-
ekf_config_path = PathJoinSubstitution(
-
[FindPackageShare("linorobot2_base"), "config", "ekf.yaml"]
-
)
-
-
world_path = PathJoinSubstitution(
-
[FindPackageShare("linorobot2_gazebo"), "worlds", "playground.world"]
-
)
-
-
description_launch_path = PathJoinSubstitution(
-
[FindPackageShare('linorobot2_description'), 'launch', 'description.launch.py']
-
)
-
-
return LaunchDescription([
-
ExecuteProcess(
-
cmd=['gazebo', '--verbose', '-s', 'libgazebo_ros_factory.so', '-s', 'libgazebo_ros_init.so', world_path],
-
output='screen'
-
),
-
-
Node(
-
package='gazebo_ros',
-
executable='spawn_entity.py',
-
name='urdf_spawner',
-
output='screen',
-
arguments=["-topic", "robot_description", "-entity", "linorobot2"]
-
),
-
-
Node(
-
package='linorobot2_gazebo',
-
executable='command_timeout.py',
-
name='command_timeout'
-
),
-
-
Node(
-
package='robot_localization',
-
executable='ekf_node',
-
name='ekf_filter_node',
-
output='screen',
-
parameters=[
-
{'use_sim_time': use_sim_time},
-
ekf_config_path
-
],
-
remappings=[("odometry/filtered", "odom")]
-
),
-
-
IncludeLaunchDescription(
-
PythonLaunchDescriptionSource(description_launch_path),
-
launch_arguments={
-
'use_sim_time': str(use_sim_time),
-
'publish_joints': 'false',
-
}.items()
-
),
-
-
IncludeLaunchDescription(
-
PythonLaunchDescriptionSource(joy_launch_path),
-
)
-
])
-
-
#sources:
-
#https://navigation.ros.org/setup_guides/index.html#
-
#https://answers.ros.org/question/374976/ros2-launch-gazebolaunchpy-from-my-own-launch-file/
-
#https://github.com/ros2/rclcpp/issues/940
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/124620482

- 点赞
- 收藏
- 关注作者
评论(0)