蓝桥ROS之f1tenth案例学习与调试(成功)

失败案例:
其实这个版本是适用于kinetic/melodic/noetic
为何失败呢?
需要将kinetic功能包全部更新到20210503版本!!!
然后编译就一切ok!
-
shiyanlou:f1tenth/ (master*) $ catkin_make [15:07:45]
-
Base path: /home/shiyanlou/Code/f1tenth
-
Source space: /home/shiyanlou/Code/f1tenth/src
-
Build space: /home/shiyanlou/Code/f1tenth/build
-
Devel space: /home/shiyanlou/Code/f1tenth/devel
-
Install space: /home/shiyanlou/Code/f1tenth/install
-
####
-
#### Running command: "make cmake_check_build_system" in "/home/shiyanlou/Code/f1tenth/build"
-
####
-
####
-
#### Running command: "make -j4 -l4" in "/home/shiyanlou/Code/f1tenth/build"
-
####
-
[ 35%] Built target f1tenth_simulator
-
[ 35%] Built target std_msgs_generate_messages_cpp
-
[ 35%] Built target sensor_msgs_generate_messages_cpp
-
[ 35%] Built target nav_msgs_generate_messages_cpp
-
[ 35%] Built target nav_msgs_generate_messages_lisp
-
[ 35%] Built target std_msgs_generate_messages_lisp
-
[ 35%] Built target sensor_msgs_generate_messages_lisp
-
[ 35%] Built target nav_msgs_generate_messages_py
-
[ 35%] Built target sensor_msgs_generate_messages_py
-
[ 35%] Built target std_msgs_generate_messages_py
-
[ 35%] Built target nav_msgs_generate_messages_nodejs
-
[ 35%] Built target sensor_msgs_generate_messages_nodejs
-
[ 35%] Built target sensor_msgs_generate_messages_eus
-
[ 35%] Built target std_msgs_generate_messages_nodejs
-
[ 35%] Built target std_msgs_generate_messages_eus
-
[ 35%] Built target nav_msgs_generate_messages_eus
-
[ 35%] Built target f1tenth_simulator_generate_messages_lisp
-
[ 35%] Built target f1tenth_simulator_generate_messages_cpp
-
[ 35%] Built target f1tenth_simulator_generate_messages_py
-
[ 41%] Built target f1tenth_simulator_generate_messages_eus
-
[ 41%] Built target f1tenth_simulator_generate_messages_nodejs
-
[ 52%] Built target random_walk
-
[ 64%] Built target mux
-
[ 76%] Built target simulator
-
[ 88%] Built target keyboard
-
[ 88%] Built target f1tenth_simulator_generate_messages
-
[100%] Built target behavior_controller
-
shiyanlou:f1tenth/ (master*) $

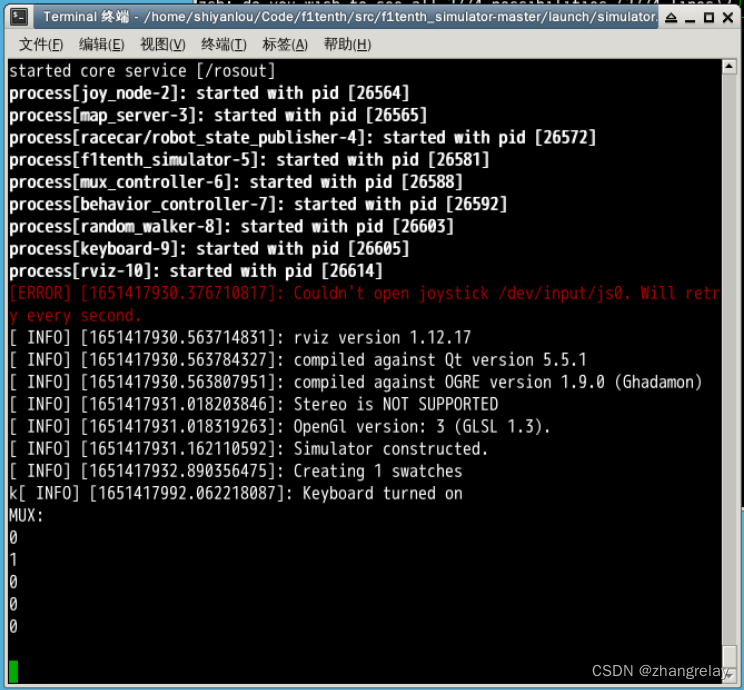
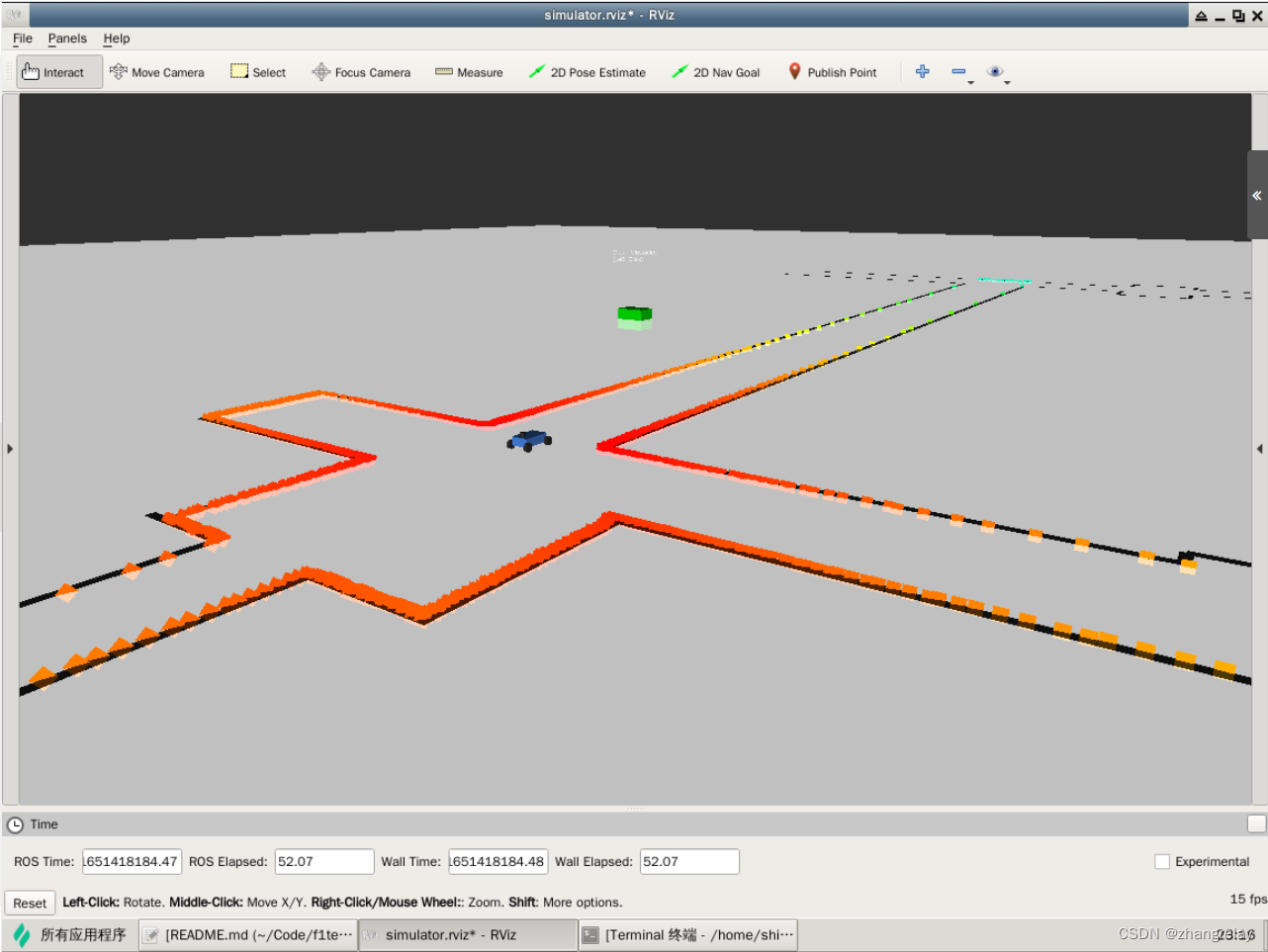
测试一下吧:
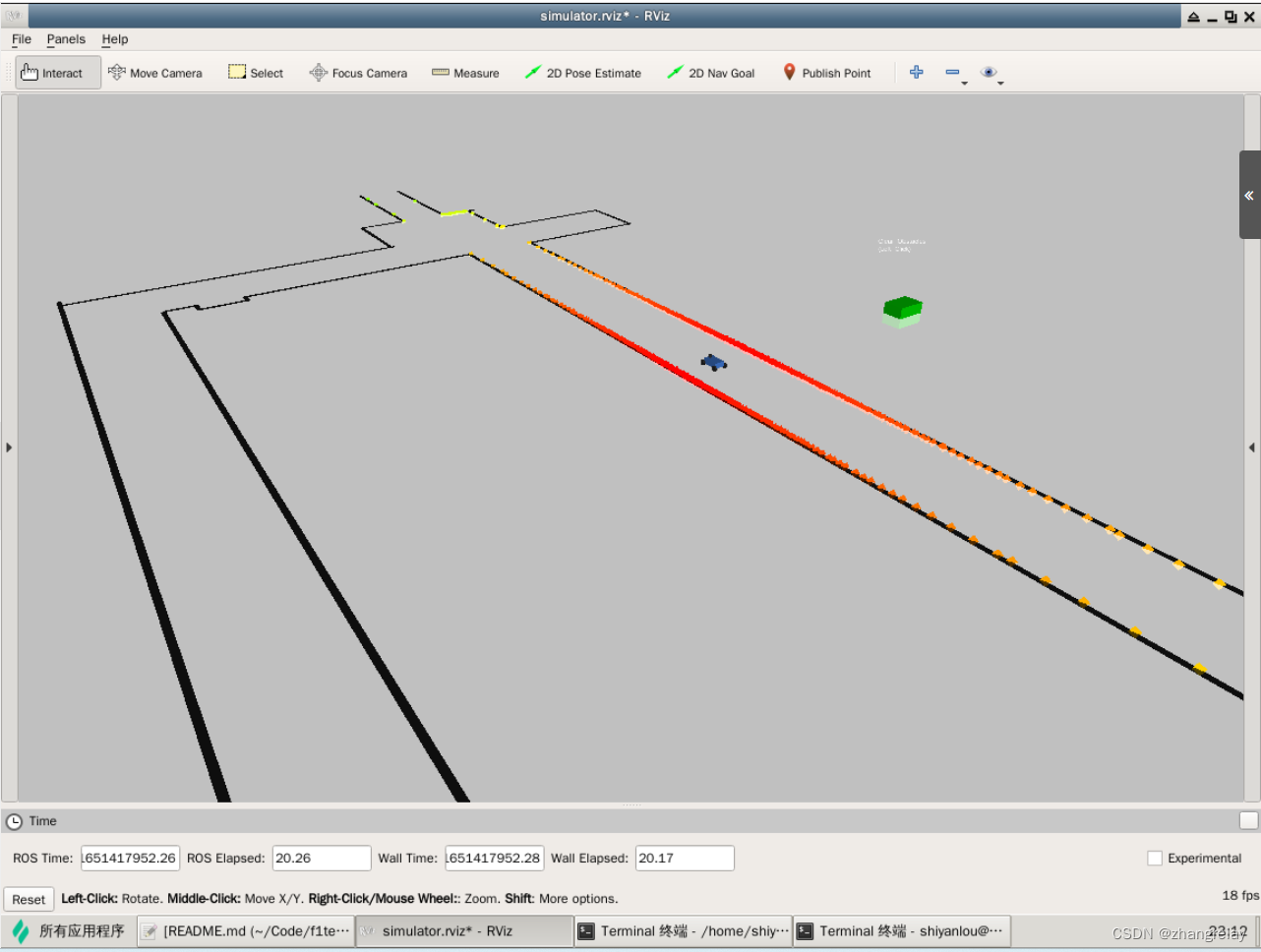
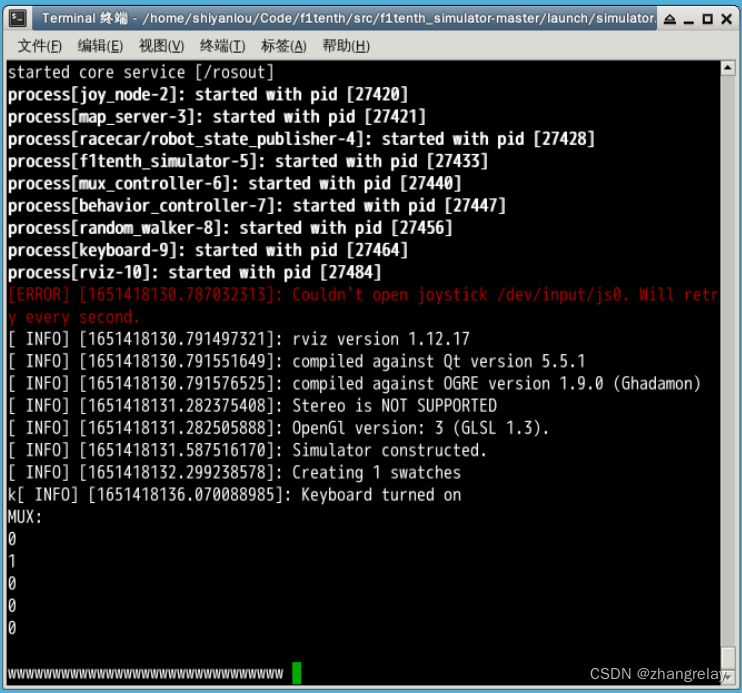
激活键盘,开动一下?
k
更多内容含自动驾驶后续补充。
全部命令如下:
1 gedit ros.asc
2 sudo apt-key add ros.asc
3 sudo apt update
4 cd Code
5 git clone https://gitcode.net/ZhangRelay/f1tenth.git
6 unzip f1tenth/f1tenth_simulator.zip
7 sudo apt install ros-kinetic-tf2-geometry-msgs ros-kinetic-ackermann-msgs ros-kinetic-joy ros-kinetic-map-server ros-kinetic-message-runtime
8 ls
9 cd f1tenth
10 catkin_make
11 catkin_make -j1 -l1
12 catkin_make
13 sudo apt update
14 sudo apt upgrade
15 stage
16 sudo apt upgrade
17 sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
18 sudo apt update
19 sudo apt upgrade
20 sudo apt update
21 catkin_make
22 source devel/setup.zsh
23 roslaunch f1tenth_simulator simulator.launch
-
shiyanlou:~/ $ history [15:17:46]
-
1 gedit ros.asc
-
2 sudo apt-key add ros.asc
-
3 sudo apt update
-
4 cd Code
-
5 git clone https://gitcode.net/ZhangRelay/f1tenth.git
-
6 unzip f1tenth/f1tenth_simulator.zip
-
7 sudo apt install ros-kinetic-tf2-geometry-msgs ros-kinetic-ackermann-msgs ros-kinetic-joy ros-kinetic-map-server ros-kinetic-message-runtime
-
8 ls
-
9 cd f1tenth
-
10 catkin_make
-
11 catkin_make -j1 -l1
-
12 catkin_make
-
13 sudo apt update
-
14 sudo apt upgrade
-
15 stage
-
16 sudo apt upgrade
-
17 sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
-
18 sudo apt update
-
19 sudo apt upgrade
-
20 sudo apt update
-
21 catkin_make
-
22 source devel/setup.zsh
-
23 roslaunch f1tenth_simulator simulator.launch
-
shiyanlou:~/ $ [15:17:51]
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/124534689

- 点赞
- 收藏
- 关注作者
评论(0)