蓝桥ROS之半自动贪吃龟turtlesim版

为啥不是全自动?全自动是作业,半自动是提示。

一步一步完成吧,非常简单。
第一步:打开蓝桥ROS
www.lanqiao.cn/courses/854
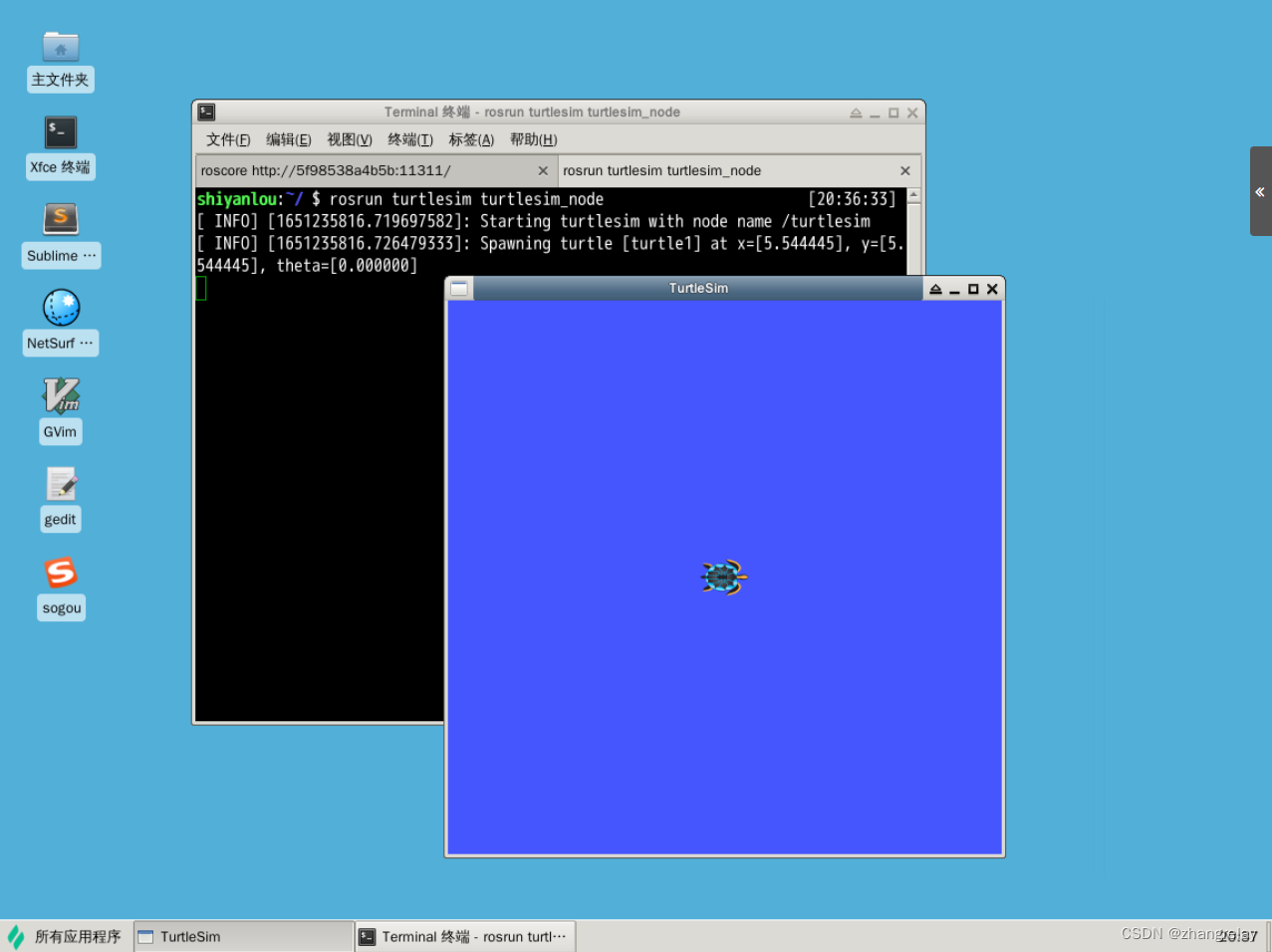
第二步:双击xfce终端,分别在不同窗口开启roscore和turtlesim
第三步:贪吃龟(蓝桥ROS机器人之turtlesim贪吃蛇)
-
import rospy
-
from tanksim.msg import Pose
-
from tanksim.srv import Spawn
-
from tanksim.srv import SetPen
-
from geometry_msgs.msg import Twist
-
from geometry_msgs.msg import TransformStamped
-
import random
-
import math
-
-
tank1_pose = Pose()
-
tanklist = []
-
lasttank = 1
-
nexttankIndex = 1
-
-
class mySpawner:
-
def __init__(self, tname):
-
self.tank_name = tname
-
self.state = 1
-
rospy.wait_for_service('/spawn')
-
try:
-
client = rospy.ServiceProxy('/spawn', Spawn)
-
x = random.randint(1, 10)
-
y = random.randint(1, 10)
-
theta = random.uniform(1, 3.14)
-
name = tname
-
_nm = client(x, y, theta, name)
-
rospy.loginfo("tank Created [%s] [%f] [%f]", name, x, y)
-
rospy.Subscriber(self.tank_name + '/pose', Pose, self.tank_poseCallback)
-
self.pub = rospy.Publisher(self.tank_name + '/cmd_vel', Twist, queue_size=10)
-
self.tank_to_follow = 1
-
self.tank_pose = Pose()
-
rospy.wait_for_service("/" + tname + '/set_pen')
-
try:
-
client = rospy.ServiceProxy("/" + tname + '/set_pen', SetPen)
-
client(0,0,0,0,1)
-
except rospy.ServiceException as e:
-
print("Service call failed: %s"%e)
-
except rospy.ServiceException as e:
-
print("Service tp spawn a tank failed. %s", e)
-
-
def tank_poseCallback(self, data):
-
self.tank_pose = data
-
-
def tank_velocity(self, msg):
-
self.pub.publish(msg)
-
-
-
def tank1_poseCallback(data):
-
global tank1_pose
-
global lasttank
-
global tanklist
-
global nexttankIndex
-
tank1_pose.x = round(data.x, 4)
-
tank1_pose.y = round(data.y, 4)
-
tank1_pose.theta = round(data.theta, 4)
-
-
for i in range(len(tanklist)):
-
twist_data = Twist()
-
diff = math.sqrt(pow((tank1_pose.x - tanklist[i].tank_pose.x) , 2) + pow((tank1_pose.y - tanklist[i].tank_pose.y), 2))
-
ang = math.atan2(tank1_pose.y - tanklist[i].tank_pose.y, tank1_pose.x - tanklist[i].tank_pose.x) - tanklist[i].tank_pose.theta
-
-
if(ang <= -3.14) or (ang > 3.14):
-
ang = ang / math.pi
-
-
if (tanklist[i].state == 1):
-
if diff < 1.0:
-
tanklist[i].state = 2
-
tanklist[i].tank_to_follow = lasttank
-
lasttank = i + 2
-
rospy.loginfo("tank Changed [%s] [%f] [%f]", tanklist[i].tank_name, diff, ang)
-
nexttankIndex += 1
-
tanklist.append(mySpawner("tank" + str(nexttankIndex)))
-
else:
-
parPose = tank1_pose
-
if(tanklist[i].tank_to_follow != 1):
-
parPose = tanklist[tanklist[i].tank_to_follow - 2].tank_pose
-
-
diff = math.sqrt(pow((parPose.x - tanklist[i].tank_pose.x) , 2) + pow((parPose.y - tanklist[i].tank_pose.y), 2))
-
goal = math.atan2(parPose.y - tanklist[i].tank_pose.y, parPose.x - tanklist[i].tank_pose.x)
-
ang = math.atan2(math.sin(goal - tanklist[i].tank_pose.theta), math.cos(goal - tanklist[i].tank_pose.theta))
-
-
if(ang <= -3.14) or (ang > 3.14):
-
ang = ang / (2*math.pi)
-
-
if(diff < 0.8):
-
twist_data.linear.x = 0
-
twist_data.angular.z = 0
-
else:
-
twist_data.linear.x = 2.5 * diff
-
twist_data.angular.z = 20 * ang
-
-
tanklist[i].tank_velocity(twist_data)
-
tanklist[i].oldAngle = ang
-
-
-
-
def spawn_tank_fn():
-
global nexttankIndex
-
rospy.init_node('snake_tank', anonymous=True)
-
rospy.Subscriber('/tank1/pose', Pose, tank1_poseCallback)
-
rospy.wait_for_service("/tank1/set_pen")
-
try:
-
client = rospy.ServiceProxy('/tank1/set_pen', SetPen)
-
client(0,0,0,0,1)
-
except rospy.ServiceException as e:
-
print("Service call failed: %s"%e)
-
-
nexttankIndex += 1
-
tanklist.append(mySpawner("tank" + str(nexttankIndex)))
-
# for i in range(2,10):
-
# tanklist.append(mySpawner("tank" + str(i)))
-
-
rospy.spin()
-
-
if __name__ == "__main__":
-
spawn_tank_fn()
新开窗口输入python snake.py

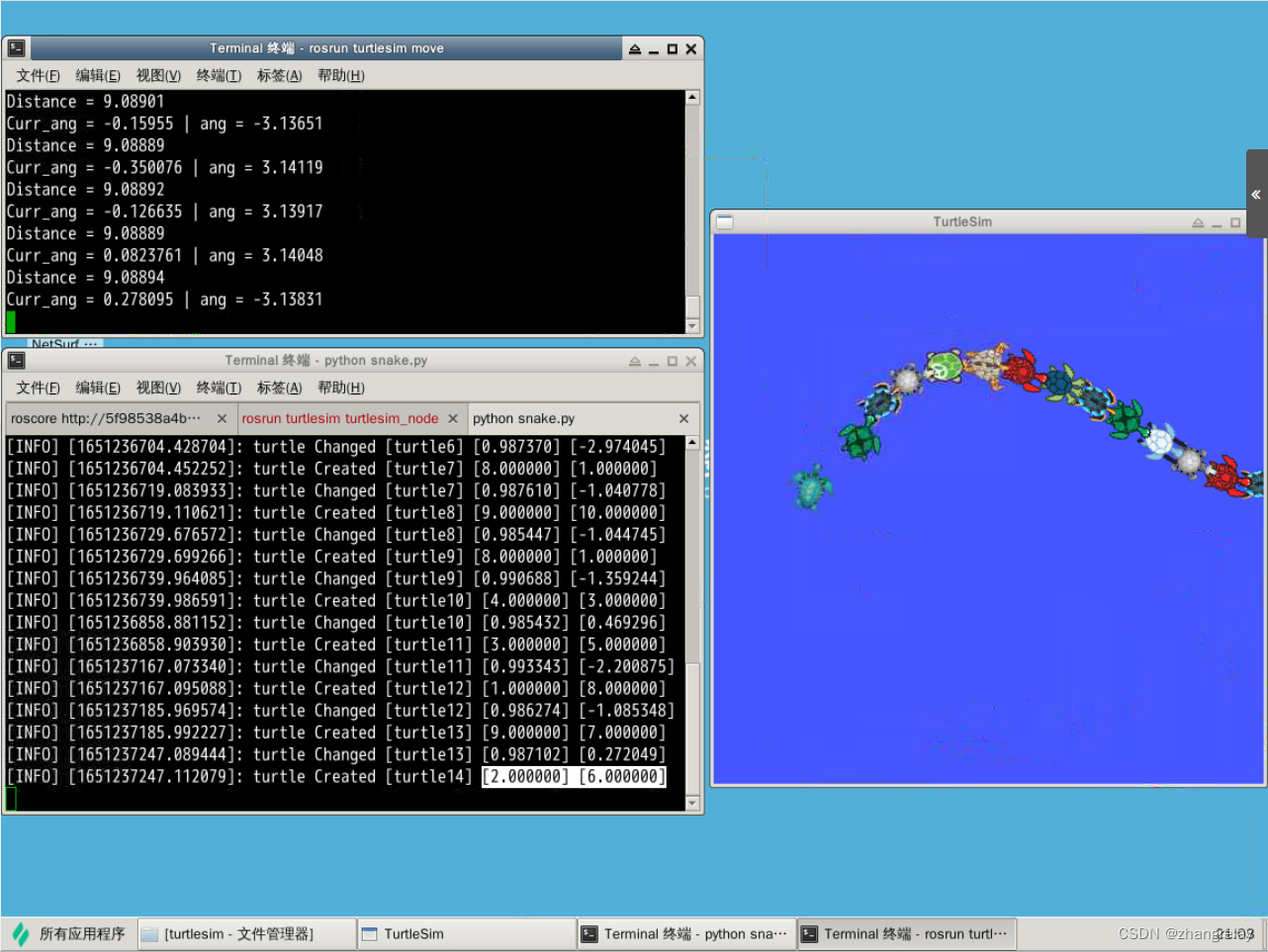
第四步:输入坐标实现贪吃龟(ROS机器人从起点到终点(四)蓝桥云实践复现)
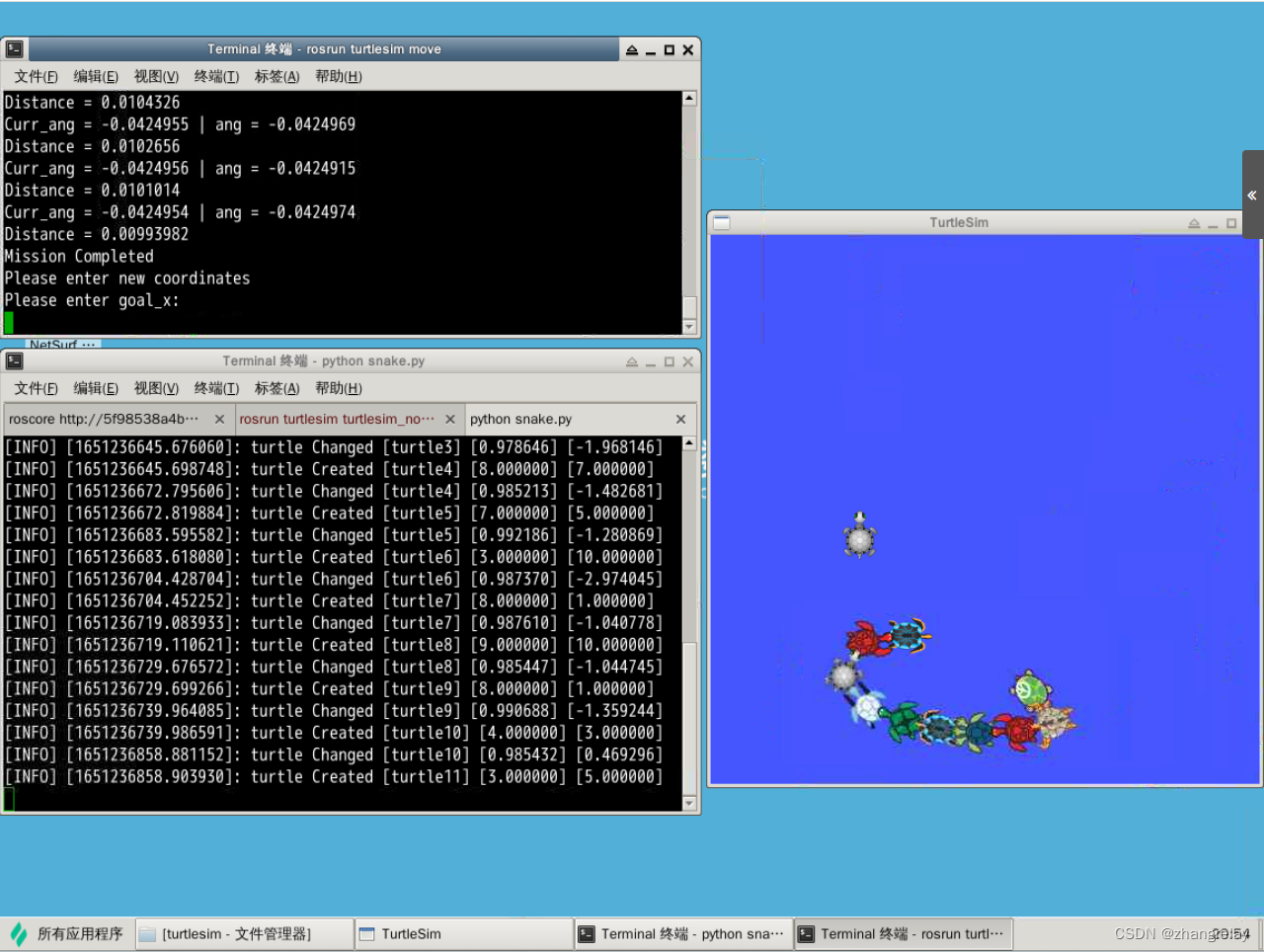
一个bug点!符号-0.1到0.1跳变,3.14? -3.14?
第五步:写个节点全自动?留作思考题吧
^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/124503850

- 点赞
- 收藏
- 关注作者
评论(0)