人机智能交互技术教学进度表(2017-2018-1)含测试 机器人方向本科限选课程

课程在迭代过程中越来越……放到博客分享一下。
|
教 学 进 度 表
2017~ 2018学年度第 一 学期
课程名称 人机智能交互技术 任课教师
授课班级 学院 电气与自动化工程
系主任(教研室主任)(签名)
| 周次 |
起止日期 |
讲课内容分章和分节的名称 |
课时数 |
习题、实验、设计、实践或科学实验名称 |
课时数 |
| 1 |
9月4日 至 9月8日 |
1. 人机交互系统基础 (1) 人机交互作用; (2) 人机交互发展; (3) 人机交互元素; |
2 |
||
| 2 |
9月11日 至 9月15日 |
2. 人机交互设计特点 (1) 人的因素; (2) 机器的因素; (3) 人与机器的区别; |
2 |
||
| 2 |
9月11日 至 9月15日 |
3. 人机交互技术(1) (1) 传统人机交互技术; 命令行交互 图形界面交互 直接操纵交互 |
2 |
||
| 3 |
9月18日 至 9月22日 |
4 人机交互技术(2) (2) 新型人机交互技术; 语音交互 视觉交互 眼球交互 肌肉感应交互 穿戴交互 情感交互 脑机交互 |
2 |
人机交互技术 (1) 传统人机交互技术; 命令行交互 图形界面交互 直接操纵交互 (2) 新型人机交互技术; 语音交互 视觉交互 眼球交互 肌肉感应交互 穿戴交互 情感交互 脑机交互 |
6 |
| 4 |
9月25日 至 9月29日 |
5 人机协作技术 (1) 多智能体理论与技术 (2) 多通道融合交互技术 (3) 机器辅助技术 (4) 基于虚拟现实技术机器感知与反馈 (5) 三维重建 |
4 |
人机协作技术 (1) 多智能体理论与技术 (2) 多通道融合交互技术 (3) 机器辅助技术 (4) 基于虚拟现实技术机器感知与反馈 (5) 三维重建 |
6 |
| 6 |
10月9日 至 10月13日 |
6 三维手势跟踪识别技术与动作信号处理 (1) 三维手势跟踪技术; (2) 混合滤波器; (3) 多传感器坐标系配置技术; (4) 精度优化算法。 |
4 |
三维手势跟踪识别技术与动作信号处理 (1) 三维手势跟踪技术; (2) 混合滤波器; (3) 多传感器坐标系配置技术; (4) 精度优化算法。 |
6 |
| 7 |
10月16日 至 10月20日 |
7 基于非受限触觉反馈的交互方法 (1) 基于空气动力的触觉反馈方法; (2) 基于热感应的触觉反馈方法; (3) 基于电磁理论的触觉反馈方法; |
2 |
||
| 8 |
10月23日 至 10月27日 |
7 基于非受限触觉反馈的交互方法 (1) 基于空气动力的触觉反馈方法; (2) 基于热感应的触觉反馈方法; (3) 基于电磁理论的触觉反馈方法; |
4 |
||
| 9 |
10月30日 至 11月3日 |
8 智能人机交互系统的实践研究 (1) 面向多自由度机器人的人机交互界面设计; (2) 面向多自由度机器人的多智能体协作模型设计; (3) 基于三维手势人机交互技术实现; |
2 |
||
| 10 |
11月6日 至 11月10日 |
8 智能人机交互系统的实践研究 (1) 面向多自由度机器人的人机交互界面设计; (2) 面向多自由度机器人的多智能体协作模型设计; (3) 基于三维手势人机交互技术实现; |
4 |
智能人机交互系统的实践研究 (1) 面向多自由度机器人的人机交互界面设计; (2) 面向多自由度机器人的多智能体协作模型设计; (3) 基于三维手势人机交互技术实现。 |
6 |
| 11 |
11月13日 至 11月17日 |
总复习 |
2 |
||
| 合计 |
30 |
24 |
2017年 08 月28 日
人机智能交互技术课堂测试(第一部分)
姓名: 学号:
- 人与机器人在智能交互中需要考虑哪些方面的区别?(6分)
- 举例说明交互软件在人机智能交互中的重要作用。(6分)
- 传统人机交互技术有哪些?(6分)
- 新型人机交互技术有哪些?(6分)
- 如何评价语音识别系统的性能?(6分)
- 基于手势的人机交互方式主要包括哪两种测量模式?(6分)
- 简述书P25页图3-13和图3-14两种人机交互方式的区别?(6分)
- 什么是情感交互?其主要分支有哪些?(6分)
- 什么是BCI?目前存在的问题主要有哪些?(6分)
- 虚拟现实系统主要有哪些?(6分)
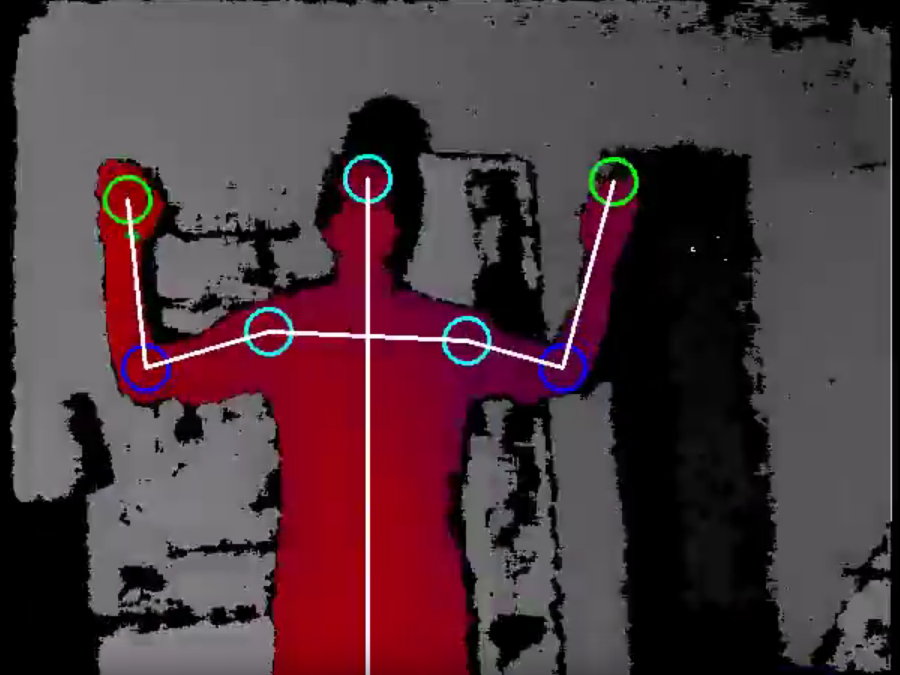
- 简述右图人体骨架是如何识别的。(20分)
- 简述右图三维重建是如何实现的。(20分)

人机智能交互技术课堂测试(第二部分)
姓名: 学号:
- 体感传感器主要包括哪些?(6分)
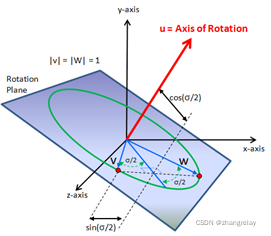
- 依据欧拉定理,写出欧拉角到四元数的转换关系公式。(6分)

- 简述粒子滤波在人机交互中的作用?(6分)
- 卡尔曼滤波的使用前提条件有哪些?(6分)
- 人机交互中精度优化算法有哪些?(6分)
- 成熟的人机信息反馈方式有哪些?(6分)
- 非受限触觉反馈的交互方法有哪些?(6分)
- 如何实现非受限触觉反馈,并举例说明?(6分)
- 智能人机交互设计包括哪些内容?(6分)
- 人机交互系统通常可分为几个模块?(6分)
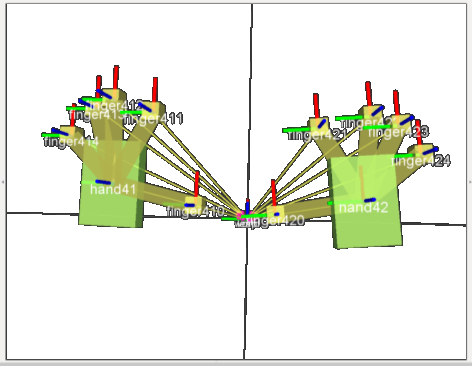
- 简述右图手势是如何识别的。(20分)
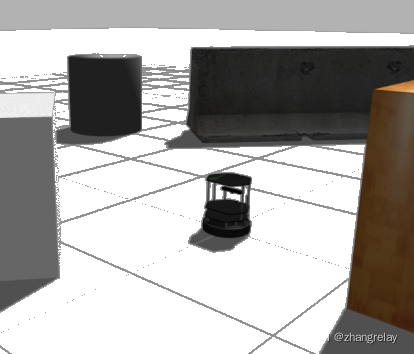
- 参考右图简述如何使用手势控制机器人运动。(20分)

文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/124085837

- 点赞
- 收藏
- 关注作者
评论(0)