蓝桥ROS机器人之现代C++学习笔记 第 5 章 智能指针与内存管理

【摘要】
为何一定要学习现代C++,因为在ROS中应用非常广,不学基础程序都看不懂的。
举例说明:
其实描述并不准确的,ROS1/2中使用的指针包括:
std::shared_ptrstd::unique_ptrstd::weak_ptr
例如:
virtual void publish(std...

为何一定要学习现代C++,因为在ROS中应用非常广,不学基础程序都看不懂的。
举例说明:

其实描述并不准确的,ROS1/2中使用的指针包括:
- std::shared_ptr
- std::unique_ptr
- std::weak_ptr

例如:
-
virtual void
-
publish(std::unique_ptr<MessageT, MessageDeleter> & msg)
-
{
-
this->do_inter_process_publish(msg.get());
-
if (store_intra_process_message_) {
-
// Take the pointer from the unique_msg, release it and pass as a void *
-
// to the ipm. The ipm should then capture it again as a unique_ptr of
-
// the correct type.
-
// TODO(wjwwood):
-
// investigate how to transfer the custom deleter (if there is one)
-
// from the incoming unique_ptr through to the ipm's unique_ptr.
-
// See: http://stackoverflow.com/questions/11002641/dynamic-casting-for-unique-ptr
-
MessageT * msg_ptr = msg.get();
-
msg.release();
-
uint64_t message_seq =
-
store_intra_process_message_(intra_process_publisher_id_, msg_ptr, typeid(MessageT));
-
rcl_interfaces::msg::IntraProcessMessage ipm;
-
ipm.publisher_id = intra_process_publisher_id_;
-
ipm.message_sequence = message_seq;
-
auto status = rcl_publish(&intra_process_publisher_handle_, &ipm);
-
if (RCL_RET_PUBLISHER_INVALID == status) {
-
rcl_reset_error(); // next call will reset error message if not context
-
if (rcl_publisher_is_valid_except_context(&intra_process_publisher_handle_)) {
-
rcl_context_t * context = rcl_publisher_get_context(&intra_process_publisher_handle_);
-
if (nullptr != context && !rcl_context_is_valid(context)) {
-
// publisher is invalid due to context being shutdown
-
return;
-
}
-
}
-
}
-
if (RCL_RET_OK != status) {
-
rclcpp::exceptions::throw_from_rcl_error(status, "failed to publish intra process message");
-
}
-
} else {
-
// Always destroy the message, even if we don't consume it, for consistency.
-
msg.reset();
-
}
-
}

以及:
-
#include <memory>
-
-
void unique_func_ref(std::unique_ptr<int> & msg) {}
-
void unique_func_value(std::unique_ptr<int> msg) {}
-
-
int main(int argc, char ** argv)
-
{
-
std::unique_ptr<int> foo(new int);
-
std::unique_ptr<int> bar(new int);
-
-
unique_func_ref(foo);
-
// does not compile
-
// unique_func_value(bar);
-
unique_func_value(std::move(bar));
-
-
return 0;
-
}

不学习现代C++,ROS1/2机器人编程连门都入不了啊………………
我自己从写C++的第一个hello world,到今天已经24年过去了,但还是水平菜如小白。
只能继续努力学习了。
智能指针C++11就已经引入了,让程序员不再需要关心手动释放内存。
(克服了传统C++,使用
new和delete去 『手工操作(不能忘会内存泄漏的?)』对资源进行释放。)

-
#include <iostream>
-
#include <memory>
-
-
void foo(std::shared_ptr<int> i)
-
{
-
(*i)++;
-
}
-
-
int main()
-
{
-
// auto pointer = new int(10); // illegal, no direct assignment
-
// std::shared_ptr construction
-
auto pointer = std::make_shared<int>(10);
-
auto pointer2 = pointer; // reference count + 1
-
auto pointer3 = pointer; // reference count + 1
-
-
-
foo(pointer);
-
std::cout << *pointer << std::endl; // 11
-
int *p = pointer.get(); // does not increase reference count
-
-
std::cout << "pointer.use_count() = " << pointer.use_count() << std::endl;
-
std::cout << "pointer2.use_count() = " << pointer2.use_count() << std::endl;
-
std::cout << "pointer3.use_count() = " << pointer3.use_count() << std::endl;
-
-
pointer2.reset();
-
std::cout << "reset pointer2:" << std::endl;
-
std::cout << "pointer.use_count() = " << pointer.use_count() << std::endl;
-
std::cout << "pointer2.use_count() = " << pointer2.use_count() << std::endl;
-
std::cout << "pointer3.use_count() = " << pointer3.use_count() << std::endl;
-
-
pointer3.reset();
-
std::cout << "reset pointer3:" << std::endl;
-
std::cout << "pointer.use_count() = " << pointer.use_count() << std::endl;
-
std::cout << "pointer2.use_count() = " << pointer2.use_count() << std::endl;
-
std::cout << "pointer3.use_count() = " << pointer3.use_count() << std::endl;
-
// std::cout << *pointer << std::endl; // reference count equals 0, illegal access
-
-
-
// Before leaving the scope, the pointer is destructed and
-
// the reference count is reduced to 0
-
return 0;
-
}

-
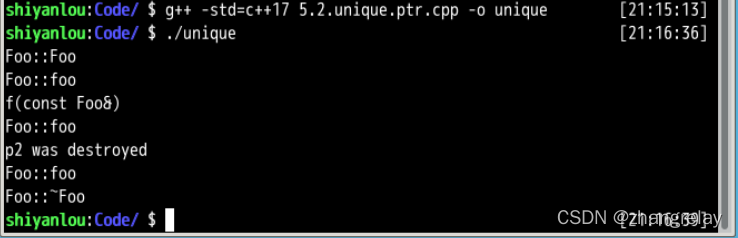
#include <iostream>
-
#include <memory>
-
-
struct Foo {
-
Foo() { std::cout << "Foo::Foo" << std::endl; }
-
~Foo() { std::cout << "Foo::~Foo" << std::endl; }
-
void foo() { std::cout << "Foo::foo" << std::endl; }
-
};
-
-
void f(const Foo &) {
-
std::cout << "f(const Foo&)" << std::endl;
-
}
-
-
int main() {
-
std::unique_ptr<Foo> p1(std::make_unique<Foo>());
-
-
// p1 is not empty, prints
-
if (p1) p1->foo();
-
{
-
std::unique_ptr<Foo> p2(std::move(p1));
-
-
// p2 is not empty, prints
-
f(*p2);
-
-
// p2 is not empty, prints
-
if(p2) p2->foo();
-
-
// p1 is empty, no prints
-
if(p1) p1->foo();
-
-
p1 = std::move(p2);
-
-
// p2 is empty, no prints
-
if(p2) p2->foo();
-
std::cout << "p2 was destroyed" << std::endl;
-
}
-
// p1 is not empty, prints
-
if (p1) p1->foo();
-
-
// Foo instance will be destroyed when leaving the scope
-
}
-
#include <iostream>
-
#include <memory>
-
-
class A;
-
class B;
-
-
class A {
-
public:
-
std::shared_ptr<B> pointer;
-
~A() {
-
std::cout << "A was destroyed" << std::endl;
-
}
-
};
-
class B {
-
public:
-
std::shared_ptr<A> pointer;
-
~B() {
-
std::cout << "B was destroyed" << std::endl;
-
}
-
};
-
int main() {
-
std::shared_ptr<A> a = std::make_shared<A>();
-
std::shared_ptr<B> b = std::make_shared<B>();
-
a->pointer = b;
-
b->pointer = a;
-
-
return 0;
-
}

文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/124067964

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)