电脑win11使用vnc连接手机ubuntu

【摘要】
由于互联需要,使用vnc,手机端开发代码太伤眼睛了。
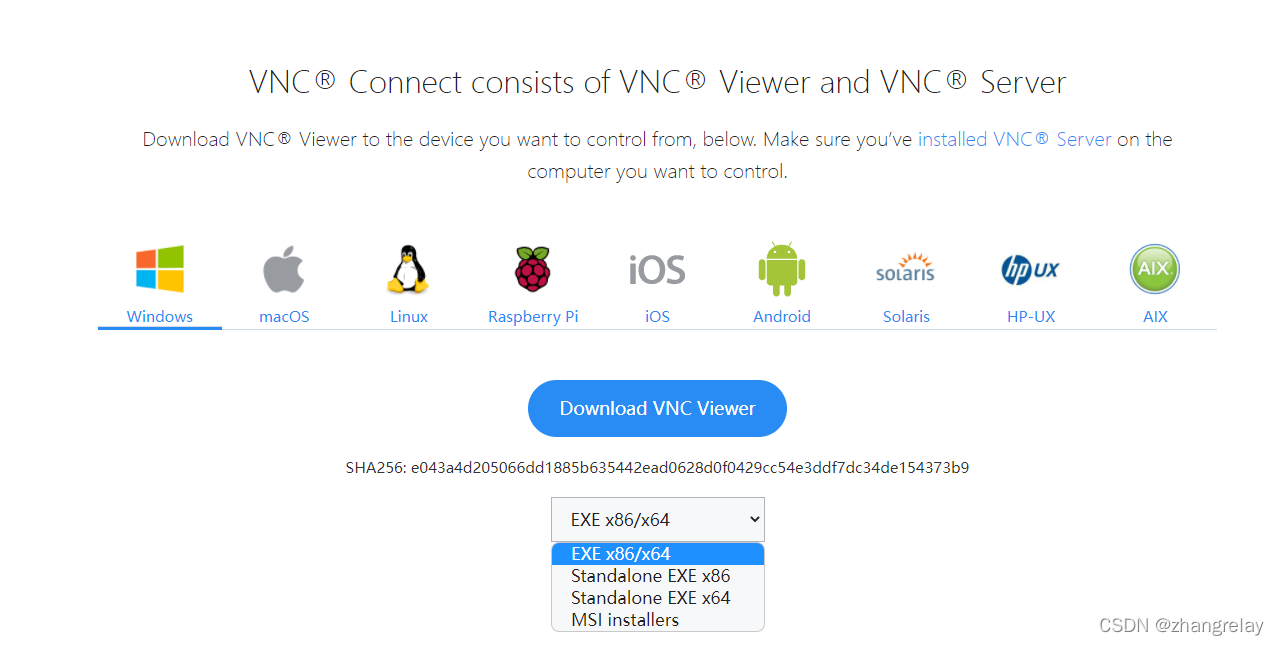
www.realvnc.com/en/connect/download/viewer/
选择standalone exe x64,试一试看看???
使用版本VNC-Viewer-6.21.1109-Windows-64bit。
双击打开,同意条款等即可...
由于互联需要,使用vnc,手机端开发代码太伤眼睛了。
选择standalone exe x64,试一试看看???
使用版本VNC-Viewer-6.21.1109-Windows-64bit。
双击打开,同意条款等即可使用:
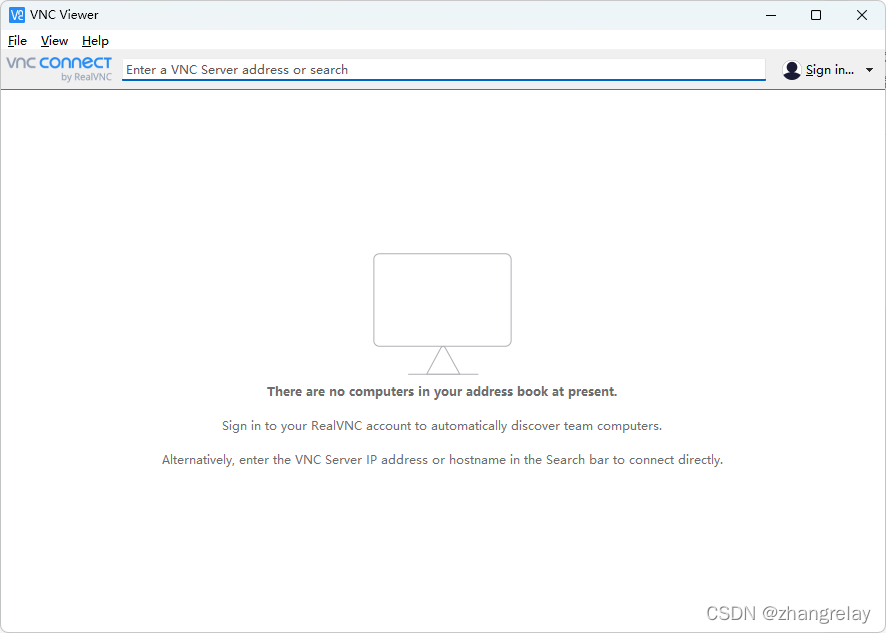
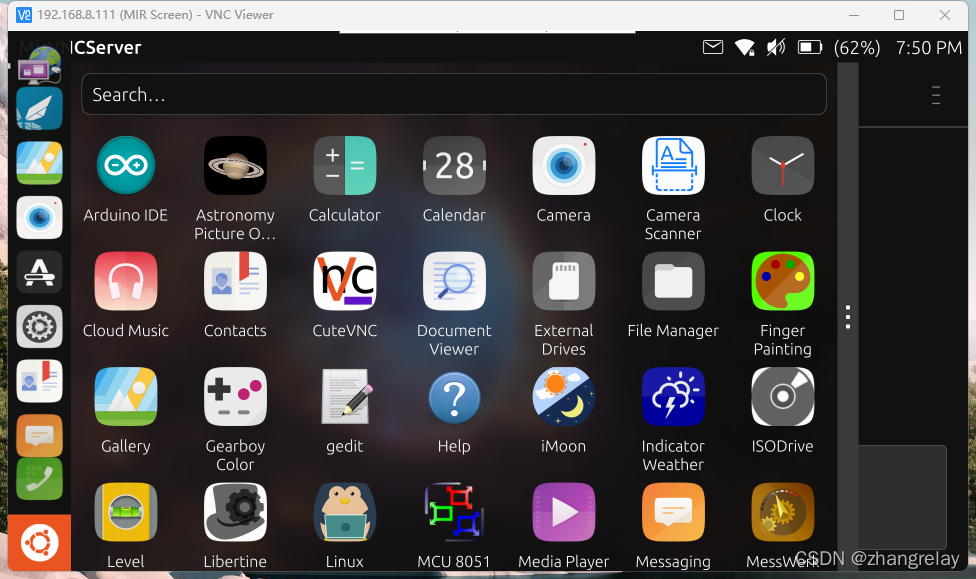
界面十分清爽,测试windows版本为:
输入IP,连上即可,竖屏:
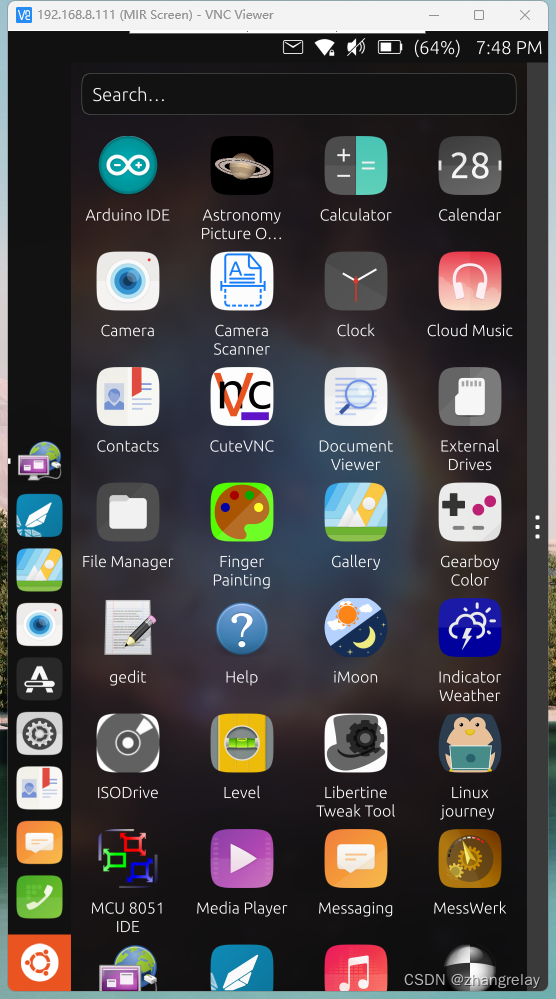
横屏:
这个停了好久未更新,主要加班太多了,后续补上。
☞ Ubuntu Touch OTA-16(Linux手机测试更新)Arduino+ROS+Python+C++等_zhangrelay的博客-CSDN博客
标配甜甜圈走一个,看看卡顿不?
把win11的ROS1也弄好,手机上好多以前开发的ROS趣味小应用,稍后补充起来。
ROS2早就装好了,后来ROS1卸载了,就补装一下。
-
**********************************************************************
-
** Visual Studio 2019 Developer Command Prompt v16.9.3
-
** Copyright (c) 2021 Microsoft Corporation
-
**********************************************************************
-
-
C:\ros_ws>roscore
-
... logging to C:\Users\zhangrelay\.ros\log\4e0f840e-adc5-11ec-b9a3-94b86dd78b23\roslaunch-LAPTOP-5REQ7K1L-22128.log
-
Checking log directory for disk usage. This may take a while.
-
Press Ctrl-C to interrupt
-
Done checking log file disk usage. Usage is <1GB.
-
started roslaunch server http://127.0.0.1:50757/
-
ros_comm version 1.15.9
-
-
-
SUMMARY
-
========
-
-
PARAMETERS
-
* /rosdistro: noetic
-
* /rosversion: 1.15.9
-
-
NODES
-
-
auto-starting new master
-
process[master]: started with pid [3268]
-
ROS_MASTER_URI=http://127.0.0.1:11311/
-
setting /run_id to 4e0f840e-adc5-11ec-b9a3-94b86dd78b23
-
process[rosout-1]: started with pid [19412]
-
started core service [/rosout]
测试一下,一切ok。
手机端:
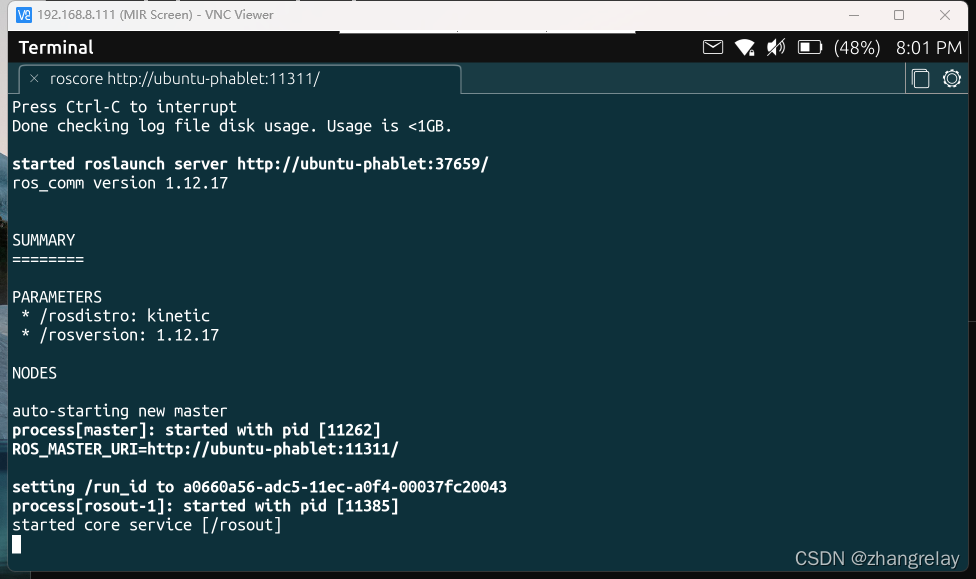
稍后配置好,即可互联互通,kinetic/melodic/noetic。
后续慢慢更新,支持ubuntu20.04,新版手机端操作系统已经来了,哈哈哈。
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/123779585

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)