蓝桥云课ROS机器人发布5年啦(原实验楼ROS机器人在线云实践课程)

在2017年春开发了这款课程,到2022年春已经5年了,并在近期逐步在博客公开了课程的扩展功能。当然这些工作都在2019年之前完成测试工作,后续全力转入ROS2课程及其相关应用型课程中。
感谢易科机器人实验室,感谢实验楼,感谢蓝桥云课,使这款免费的ROS云实践平台得以诞生并延续至今。
个人也深深感受到开发一款“中性”课程难,维护一款“中性”课程更难。
希望课程能给大家一个客观的视角看待ROS机器人及其文档,因此也并没有过多加入个人主观陈述。
这并不是一款容易学习的在线课程,但对于机器人相关方向的从业者应该是值得使用一次看看的。
课程开设的初衷(2017):
收获了课程评论 (1350) 实验报告 (446)实验问答 (142),是全网交互性最好的ROS课程之一。
还有一些试用博文分享:
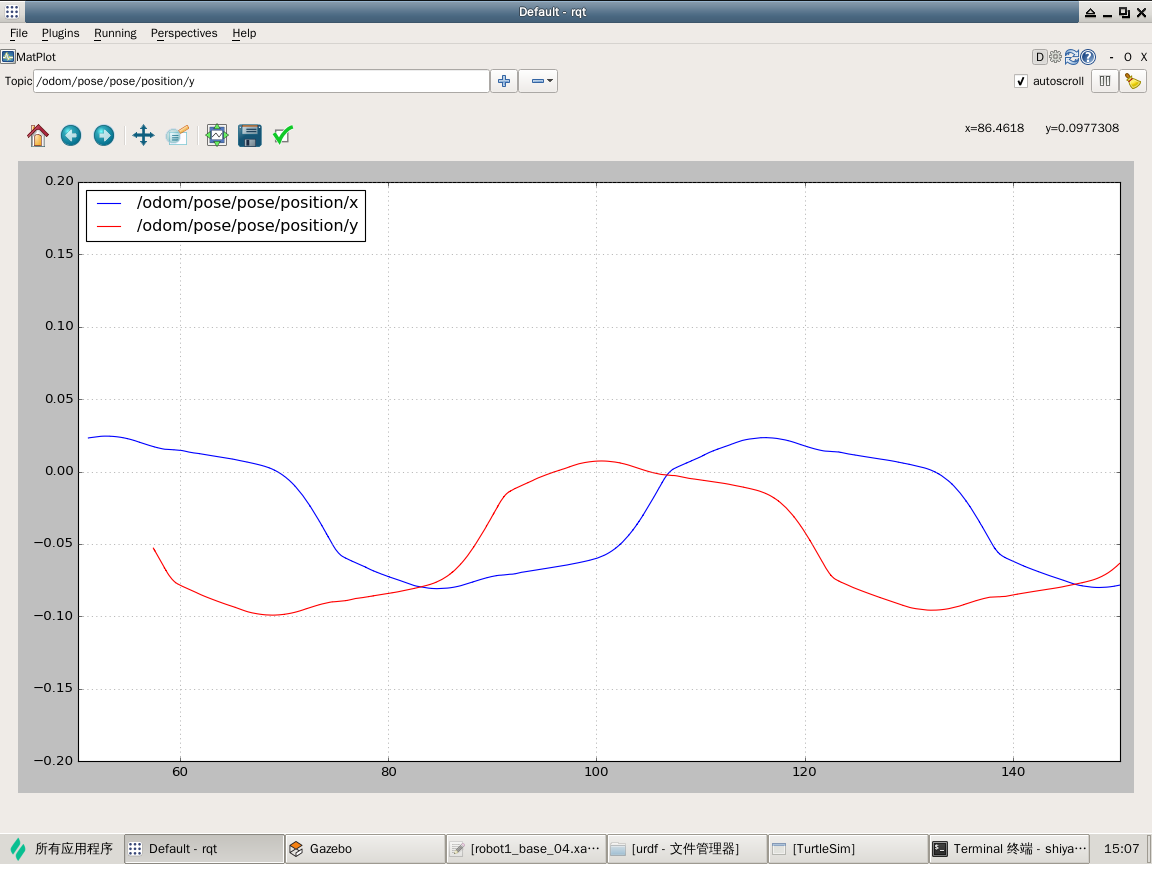
后续课程ROS版本由indigo更新为kinetic,几乎所有ROS书中的案例(仿真部分)都可以在此平台完成。
当然,功能远远不止如此,还有一些公开课:
机器人操作系统云端实践平台设计与使用-实验楼ROS-
扩展性是在2015-2016年构思课程时就考虑到的,课程适用于C/C++学习,单片机学习,现代控制理论学习,ROS机器人基础编程学习,SLAM技术,各种扩展仿真工具试用和研究等。
C/C++案例


单片机案例


ROS机器人扩展:

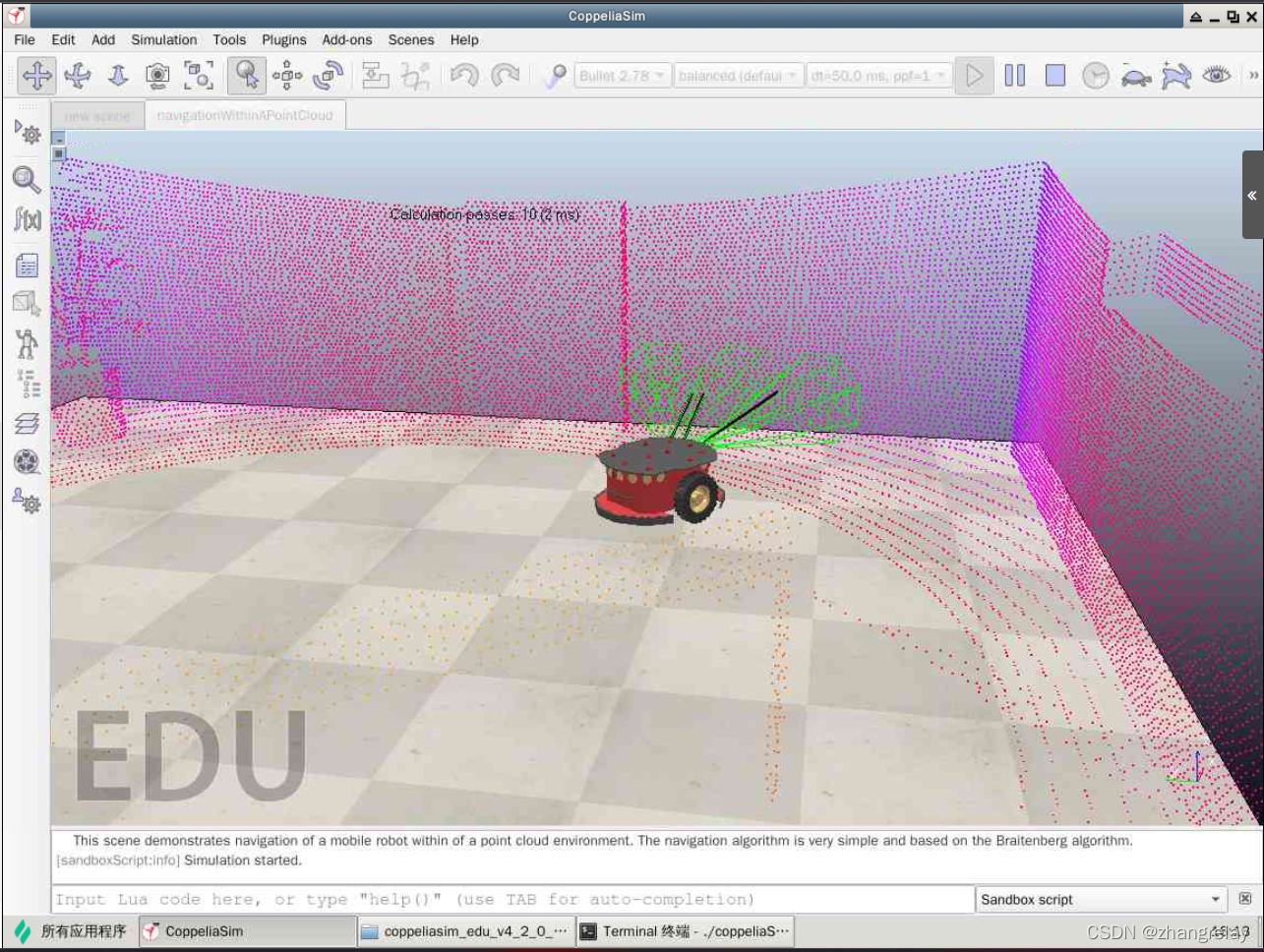
第三方仿真软件扩展
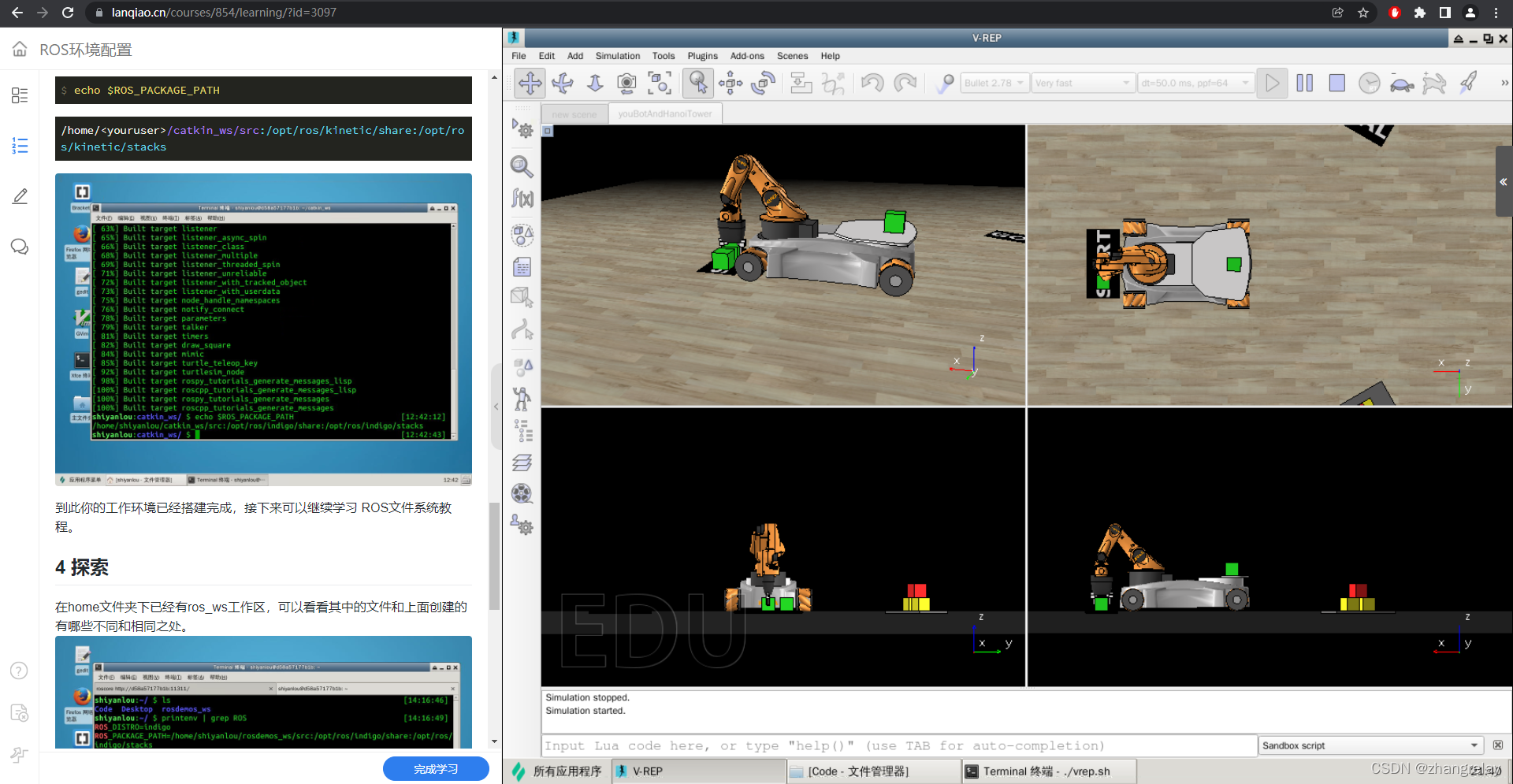
蓝桥ROS机器人之CoppeliaSim_Edu_V4_2_0
URDF案例:
URDF机器人模型ROS1&2案例(noetic+galactic)


最后,希望各位朋友在试用这个课程的时候,不要局限于课程本身。
就如同个人给学生上课时所说:
祝大家都能学有所获,格局开阔。
开启ROS机器人云实践平台的无限可能。
感谢一直以来默默或不默默支持我的朋友们,感谢感恩。
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/123689909

- 点赞
- 收藏
- 关注作者
评论(0)