蓝桥ROS课程版本不匹配和功能包缺失报错解决

【摘要】
课程授课是发现不同版本ROS功能包会有一些小bug:
比如
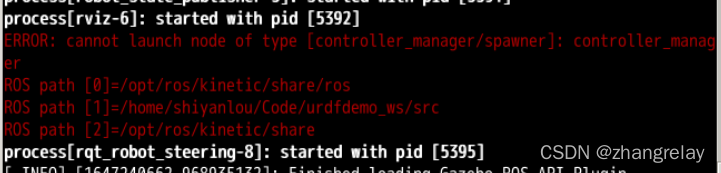
报错信息类似:
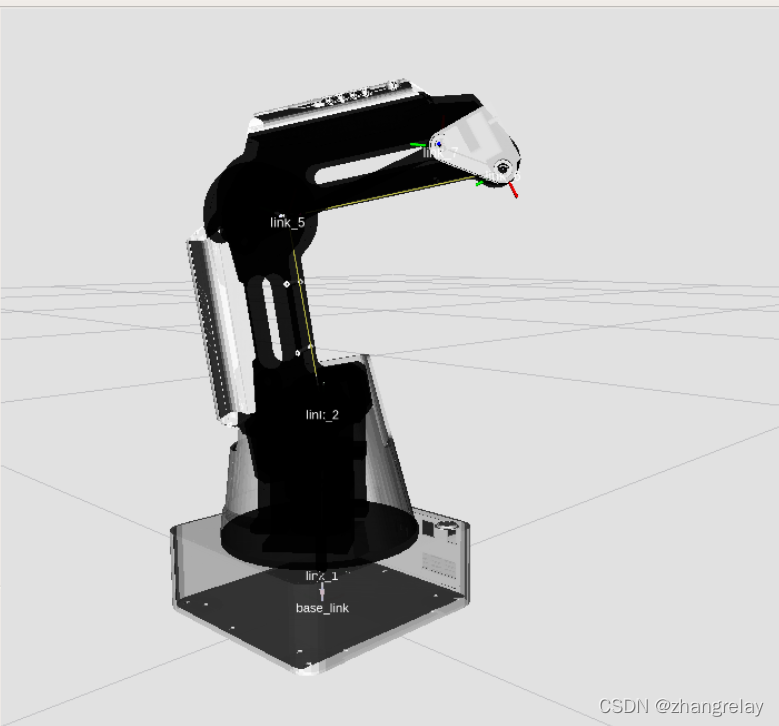
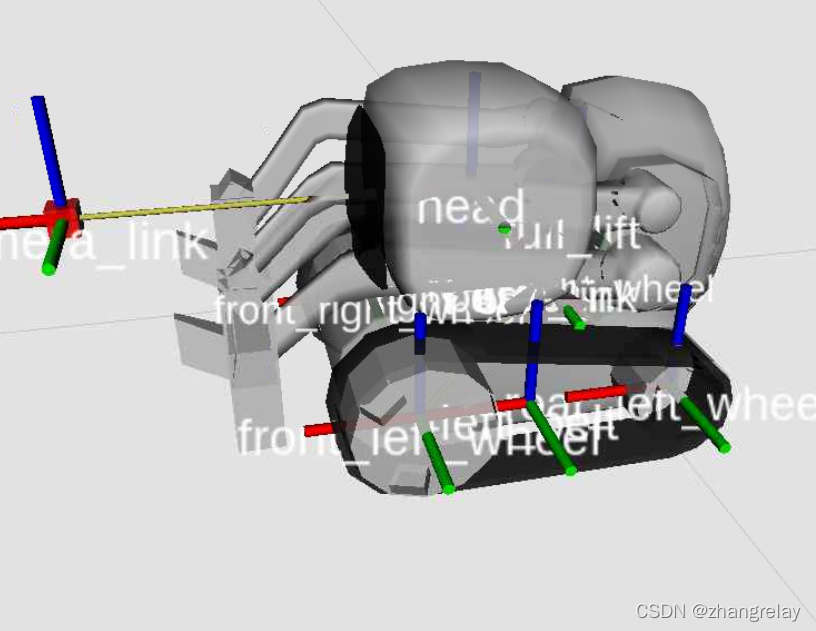
课程中已经详细讲解,需要配置,成功后如下:
关于功能包缺失,使用更新方式无法成功,毕竟云系统为了安全性锁定的hosts。
这时候需要手动编译功能包:
contr...
课程授课是发现不同版本ROS功能包会有一些小bug:
比如
报错信息类似:
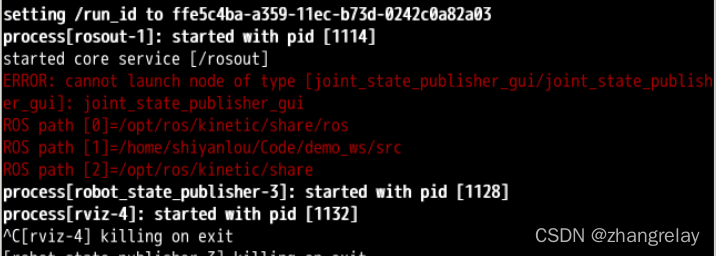
课程中已经详细讲解,需要配置,成功后如下:
关于功能包缺失,使用更新方式无法成功,毕竟云系统为了安全性锁定的hosts。
![]()

这时候需要手动编译功能包:
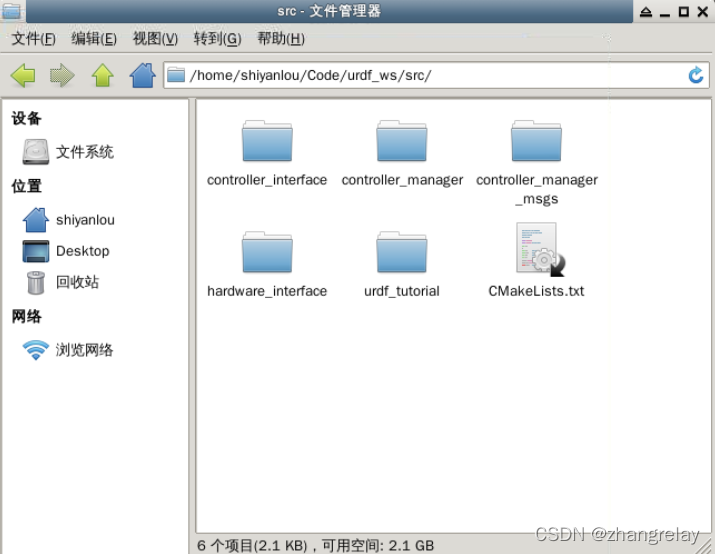
- controller_manager
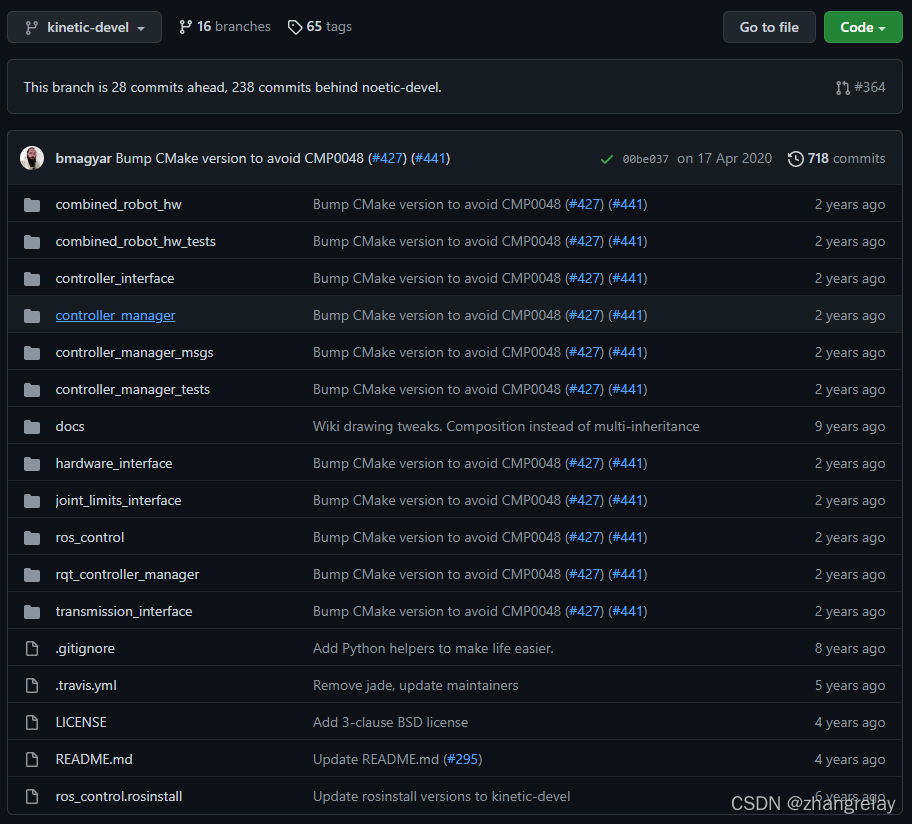
放入到缺失文件的功能包工作空间中,然后进行编译。
首先确保有这些文件。
使用unzip解压。
由于功能包存在相互依赖关系,src需要文件如下:

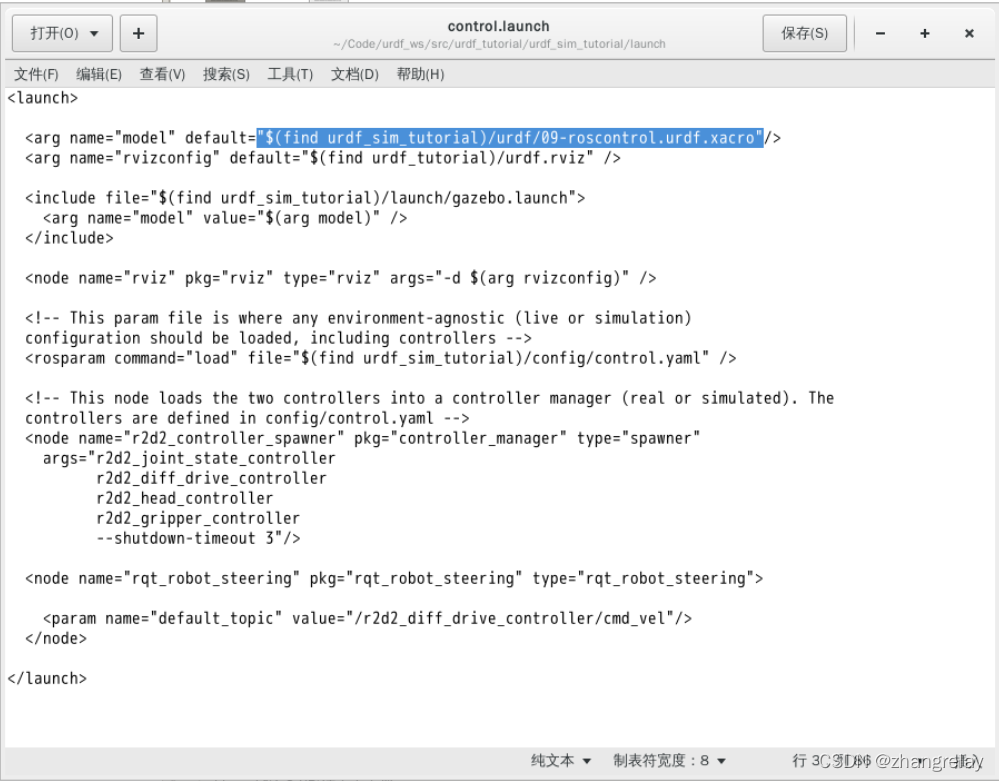
使用control
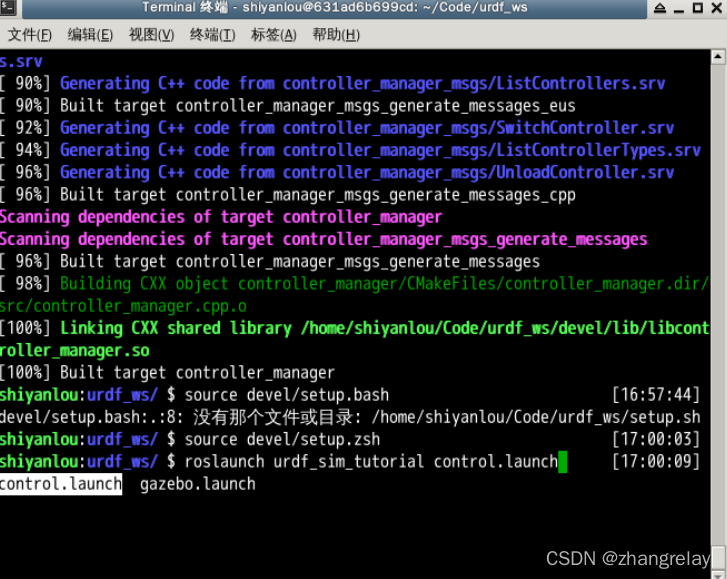
出现:

修改urdf_tutorial为urdf_sim_tutorial。
<launch>
<arg name="model" default="$(find urdf_tutorial)/urdf/r2d2.xacro"/>
<arg name="rvizconfig" default="$(find urdf_tutorial)/urdf.rviz" />
<include file="$(find urdf_sim_tutorial)/launch/gazebo.launch">
<arg name="model" value="$(arg model)" />
</include>
<node name="rviz" pkg="rviz" type="rviz" args="-d $(arg rvizconfig)" />
<!-- This param file is where any environment-agnostic (live or simulation)
configuration should be loaded, including controllers -->
<rosparam command="load" file="$(find urdf_sim_tutorial)/config/control.yaml" />
<!-- This node loads the two controllers into a controller manager (real or simulated). The
controllers are defined in config/control.yaml -->
<node name="r2d2_controller_spawner" pkg="controller_manager" type="spawner"
args="r2d2_joint_state_controller
r2d2_diff_drive_controller
r2d2_head_controller
r2d2_gripper_controller
--shutdown-timeout 3"/>
<node name="rqt_robot_steering" pkg="rqt_robot_steering" type="rqt_robot_steering">
<param name="default_topic" value="/r2d2_diff_drive_controller/cmd_vel"/>
</node>
</launch> 
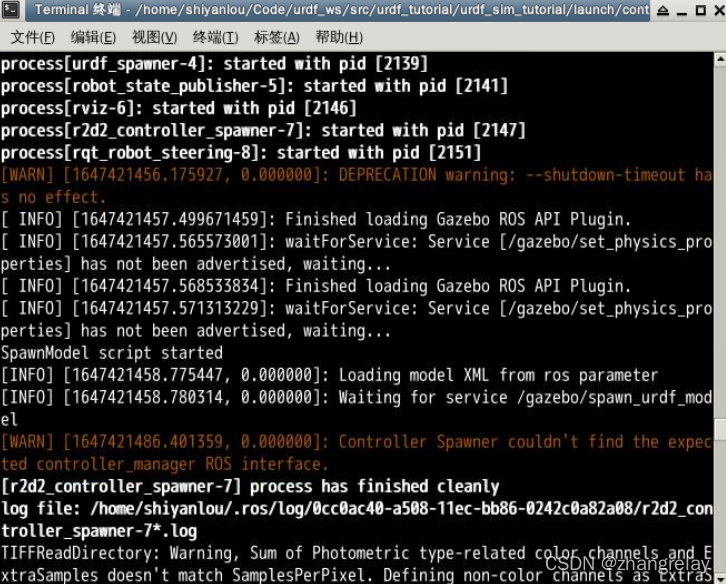
报错消失,机器人能否动起来。

并没有动起来。
多了一个WARN。
果然很麻烦啊。
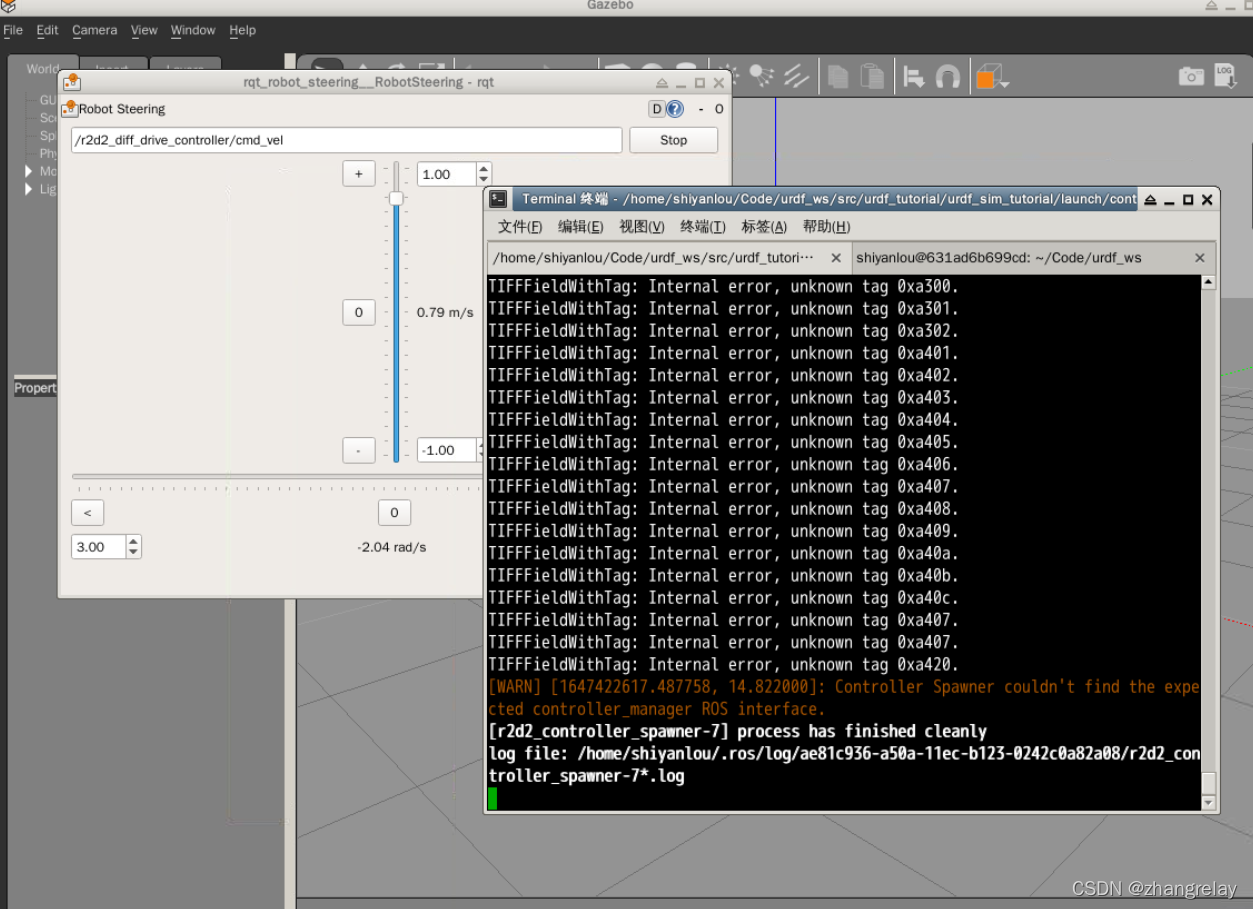
接着修改:
最终还是不行。
留作后续修订。
只解决了[ERROR],但是机器人还是不能动。
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/123530216

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)