【图像分类】 一文读懂AlexNet

目录
1、 模型介绍
AlexNet是由Alex Krizhevsky 提出的首个应用于图像分类的深层卷积神经网络,该网络在2012年ILSVRC(ImageNet Large Scale Visual Recognition Competition)图像分类竞赛中以15.3%的top-5测试错误率赢得第一名。也是在那年之后,更多的更深的神经网络被提出,比如优秀的vgg,。 这对于传统的机器学习分类算法而言,已经相当的出色。
AlexNet中包含了几个比较新的技术点,也首次在CNN中成功应用了ReLU、Dropout和LRN等Trick。同时AlexNet也使用了GPU进行运算加速。
AlexNet将LeNet的思想发扬光大,把CNN的基本原理应用到了很深很宽的网络中。AlexNet主要使用到的新技术点如下:
(1)成功使用ReLU作为CNN的激活函数,并验证其效果在较深的网络超过了Sigmoid,成功解决了Sigmoid在网络较深时的梯度弥散问题。虽然ReLU激活函数在很久之前就被提出了,但是直到AlexNet的出现才将其发扬光大。
(2)训练时使用Dropout随机忽略一部分神经元,以避免模型过拟合。Dropout虽有单独的论文论述,但是AlexNet将其实用化,通过实践证实了它的效果。在AlexNet中主要是最后几个全连接层使用了Dropout。
(3)在CNN中使用重叠的最大池化。此前CNN中普遍使用平均池化,AlexNet全部使用最大池化,避免平均池化的模糊化效果。并且AlexNet中提出让步长比池化核的尺寸小,这样池化层的输出之间会有重叠和覆盖,提升了特征的丰富性。
(4)提出了LRN层,对局部神经元的活动创建竞争机制,使得其中响应比较大的值变得相对更大,并抑制其他反馈较小的神经元,增强了模型的泛化能力。
(5)使用CUDA加速深度卷积网络的训练,利用GPU强大的并行计算能力,处理神经网络训练时大量的矩阵运算。AlexNet使用了两块GTX 580 GPU进行训练,单个GTX 580只有3GB显存,这限制了可训练的网络的最大规模。因此作者将AlexNet分布在两个GPU上,在每个GPU的显存中储存一半的神经元的参数。因为GPU之间通信方便,可以互相访问显存,而不需要通过主机内存,所以同时使用多块GPU也是非常高效的。同时,AlexNet的设计让GPU之间的通信只在网络的某些层进行,控制了通信的性能损耗。
(6)数据增强,随机地从256*256的原始图像中截取224*224大小的区域(以及水平翻转的镜像),相当于增加了2*(256-224)^2=2048倍的数据量。如果没有数据增强,仅靠原始的数据量,参数众多的CNN会陷入过拟合中,使用了数据增强后可以大大减轻过拟合,提升泛化能力。进行预测时,则是取图片的四个角加中间共5个位置,并进行左右翻转,一共获得10张图片,对他们进行预测并对10次结果求均值。同时,AlexNet论文中提到了会对图像的RGB数据进行PCA处理,并对主成分做一个标准差为0.1的高斯扰动,增加一些噪声,这个Trick可以让错误率再下降1%。
2、 模型结构

![]()
首先这幅图分为上下两个部分的网络,论文中提到这两部分网络是分别对应两个GPU,只有到了特定的网络层后才需要两块GPU进行交互,这种设置完全是利用两块GPU来提高运算的效率,其实在网络结构上差异不是很大。为了更方便的理解,我们假设现在只有一块GPU或者我们用CPU进行运算,我们从这个稍微简化点的方向区分析这个网络结构。网络总共的层数为8层,5层卷积,3层全连接层。
第一层:卷积层1,输入为 224 × 224 × 3 的图像,卷积核的数量为96,论文中两片GPU分别计算48个核; 卷积核的大小为 11 × 11 × 3,stride = 4,stride表示的是步长,padding = 2。
卷积后的图形大小是怎样的呢?
wide = (224 + 2 * padding - kernel_size) / stride + 1 = 55
height = (224 + 2 * padding - kernel_size) / stride + 1 = 55
dimention = 96
然后进行 (Local Response Normalized), 后面跟着池化pool_size = (3, 3), stride = 2, pad = 0 最终获得第一层卷积的feature map
最终第一层卷积的输出为96×55×55
第二层:卷积层2, 输入为上一层卷积的feature map, 卷积的个数为256个,论文中的两个GPU分别有128个卷积核。卷积核的大小为:5 × 5 × 48, padding = 2, stride = 1; 然后做 LRN, 最后 max_pooling, pool_size = (3, 3), stride = 2;
第三层:卷积3, 输入为第二层的输出,卷积核个数为384, kernel_size = (3 × 3 × 256 ), padding = 1, 第三层没有做LRN和Pool
第四层:卷积4, 输入为第三层的输出,卷积核个数为384, kernel_size = (3 × 3 ), padding = 1, 和第三层一样,没有LRN和Pool
第五层:卷积5, 输入为第四层的输出,卷积核个数为256, kernel_size = (3 × 3 ), padding = 1。然后直接进行max_pooling, pool_size = (3, 3), stride = 2;
第6,7,8层是全连接层,每一层的神经元的个数为4096,最终输出softmax为1000,因为上面介绍过,ImageNet这个比赛的分类个数为1000。全连接层中使用了RELU和Dropout。
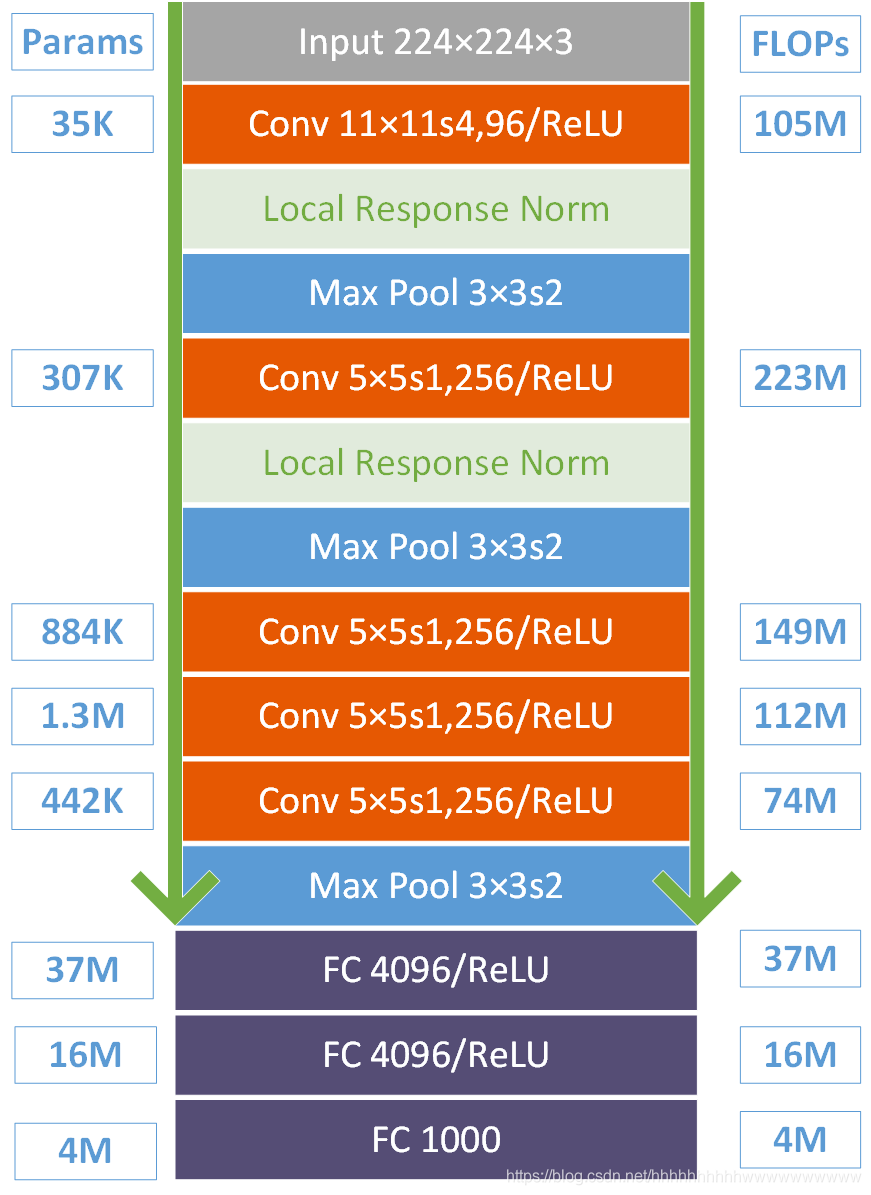
下图是对上面参数的总结。
![]()
3、 模型特性
- 所有卷积层都使用ReLU作为非线性映射函数,使模型收敛速度更快
- 在多个GPU上进行模型的训练,不但可以提高模型的训练速度,还能提升数据的使用规模
- 使用LRN对局部的特征进行归一化,结果作为ReLU激活函数的输入能有效降低错误率
- 重叠最大池化(overlapping max pooling),即池化范围z与步长s存在关系z>s(如
 中核尺度为3×3/2),避免平均池化(average pooling)的平均效应
中核尺度为3×3/2),避免平均池化(average pooling)的平均效应 - 使用随机丢弃技术(dropout)选择性地忽略训练中的单个神经元,避免模型的过拟合
4、Pytorch官方实现
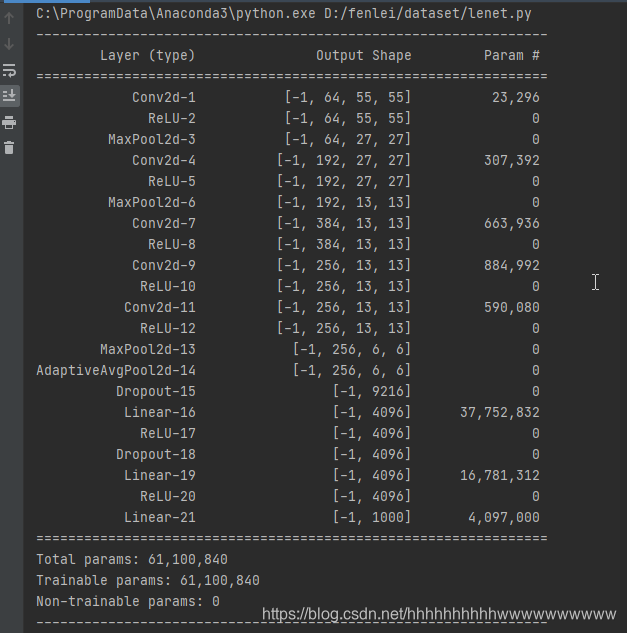
pytorch的官方并没有严格按照AlexNet论文的实现,第一个卷积是64个卷积核,官方是96个。
class AlexNet(nn.Module):
def __init__(self, num_classes=1000):
super(AlexNet, self).__init__()
self.features = nn.Sequential(
nn.Conv2d(3, 64, kernel_size=11, stride=4, padding=2),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=3, stride=2),
nn.Conv2d(64, 192, kernel_size=5, padding=2),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=3, stride=2),
nn.Conv2d(192, 384, kernel_size=3, padding=1),
nn.ReLU(inplace=True),
nn.Conv2d(384, 256, kernel_size=3, padding=1),
nn.ReLU(inplace=True),
nn.Conv2d(256, 256, kernel_size=3, padding=1),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=3, stride=2),
)
self.avgpool = nn.AdaptiveAvgPool2d((6, 6))
self.classifier = nn.Sequential(
nn.Dropout(),
nn.Linear(256 * 6 * 6, 4096),
nn.ReLU(inplace=True),
nn.Dropout(),
nn.Linear(4096, 4096),
nn.ReLU(inplace=True),
nn.Linear(4096, num_classes),
)
def forward(self, x):
x = self.features(x)
x = self.avgpool(x)
x = torch.flatten(x, 1)
x = self.classifier(x)
return x
![]()
5、keras实现
import os
import pandas as pd
import numpy as np
from keras.callbacks import EarlyStopping, ModelCheckpoint
from matplotlib import pyplot as plt
from skimage.io import imread, imshow
from skimage import transform
import warnings
from tqdm import tqdm
from keras.layers import Input, Lambda, Conv2D, MaxPool2D, BatchNormalization, Dense, Flatten, Dropout
from keras.models import Model
from keras.utils import to_categorical
def AlexNet(input_shape, num_classes):
inputs = Input(input_shape, name="Input")
x = ZeroPadding2D(((3, 0), (3, 0)))(inputs)
x = Conv2D(96,
(11, 11),
4,
kernel_initializer=initializers.RandomNormal(stddev=0.01),
name="Conv_1")(x)
x = Lambda(tf.nn.local_response_normalization, name="Lrn_1")(x)
x = Activation(activation="relu")(x)
x = MaxPool2D(name="Maxpool_1")(x)
x = Conv2D(256,
(5, 5),
kernel_initializer=initializers.RandomNormal(stddev=0.01),
padding="SAME",
name="Conv_2")(x)
x = Lambda(tf.nn.local_response_normalization, name="Lrn_2")(x)
x = Activation(activation="relu")(x)
x = MaxPool2D(name="Maxpool_2")(x)
x = Conv2D(384,
(3, 3),
padding="Same",
kernel_initializer=initializers.RandomNormal(stddev=0.01),
name="Conv_3_1")(x)
x = Conv2D(384,
(3, 3),
padding="Same",
kernel_initializer=initializers.RandomNormal(stddev=0.01),
name="Conv_3_2")(x)
x = Conv2D(256,
(3, 3),
activation="relu",
padding="Same",
kernel_initializer=initializers.RandomNormal(stddev=0.01),
name="Conv_3_3")(x)
x = MaxPool2D(name="Maxpool_3")(x)
x = Flatten(name="Flt_1")(x)
x = Dense(4096,
activation="relu",
kernel_initializer=initializers.RandomNormal(stddev=0.01),
name="fc_1")(x)
x = Dropout(0.5, name="drop_1")(x)
x = Dense(4096,
activation="relu",
kernel_initializer=initializers.RandomNormal(stddev=0.01),
name="fc_2")(x)
x = Dropout(0.5, name="drop_2")(x)
output = keras.layers.Dense(num_classes, activation="softmax", name="Output")(x)
m = keras.Model(inputs, output, name="AlexNet")
m.summary()
return m

- 点赞
- 收藏
- 关注作者
评论(0)