慧鱼小车编程20构建控制面板

目的:
本节中你将学习从计算机上建立一个人机交互控制面板来远程控制车辆。你的慧鱼小车将通过蓝牙与计算机连接到一起,最佳的远程控制距离约在十米以内。在开始本节的学习内容前,你有必要先搭建出一辆可以进行控制小车。
设备:
慧鱼小车、计算机软件ROBO Pro
过程:
参考下图构建一辆可以用于远程控制的小车模型。完成本实验只需要小车安装有2个编码电机和一个摄像头即可。

创建程序
打开ROBO Pro软件,创建一个新的文件。 将级别(level)设置为“Level 5:Objects(级别5:对象)”。点击Main program(主程序下的panel(面板)选项卡。
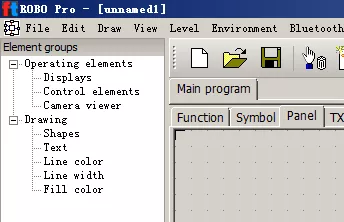
当切换到panel(面板)选项卡后,你会发现左侧模块窗口中提供给你能使用的模块分类发生了很大的变化,它提供给你一些用于制作人机交互界面时所需要的常用控件。参看下图:
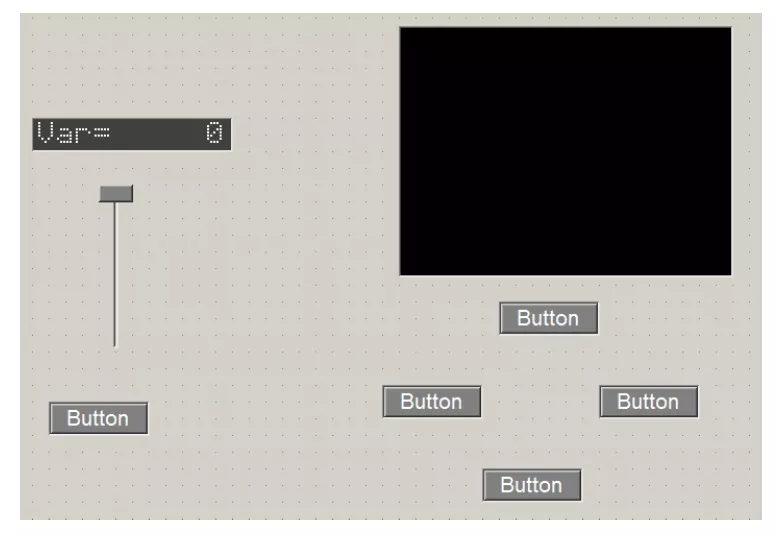
参照下图,在panel(面板)界面中拖拽出以下这些模块并摆放好它们的位置。这里主要用到四种模块:Button(按钮)控件5个,Slider(滑块)控件1个,Text Display(文本显示)控件1个,和Camera viewer(摄像头监视窗口)控件1个。
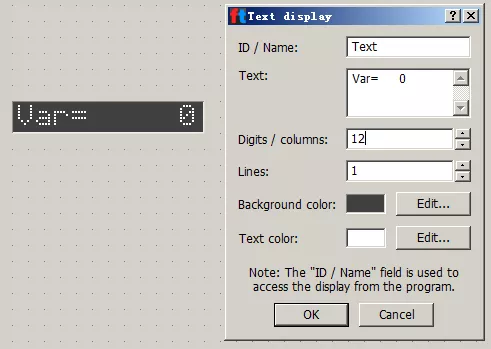
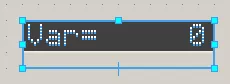
右键单击Text Display(文本显示)控件,弹出属性设置面板,将“Digits/columns(数位/列)”属性设置为12,这意味着文字框中的字符显示宽度为12。如下图所示:
右键单击Slider(滑块)控件,弹出属性设置面板,将“Maximum value(最大值)”属性设置为8,这意味着滑块可调控的数值范围是0-8。如下图所示:

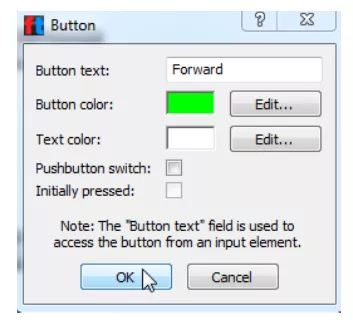
分别右键单击四个控制小车运行方向的Button(按钮)控件,弹出属性设置面板,分别将四个按钮控件的名字设置为为forward(向前)、back(向后)、left(向左)和right(向右),调整你想要的按钮颜色。如下图所示:
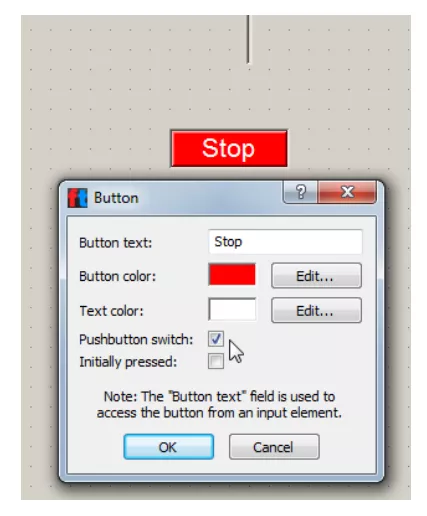
滑块控件下方有一个按钮,右键单击这个Button(按钮)控件,弹出属性设置面板,将这个按钮控件的名字设置为为stop(停止),调整你想要的按钮颜色。如下图所示,选中复选框“Pushbutton Switch(按钮开关)”。这个按钮控件是否被按下,决定着对电机的控制是否生效。
你可以通过菜单栏中的“Draw(绘图)”中的“Edit(编辑)”功能来调整各控件或摄像头监视窗口的大小。点击你想调整尺寸的控件后,该控件四周会出现可操控的锚点,使用鼠标拖拽这些锚点,即可改变控件对象的大小。
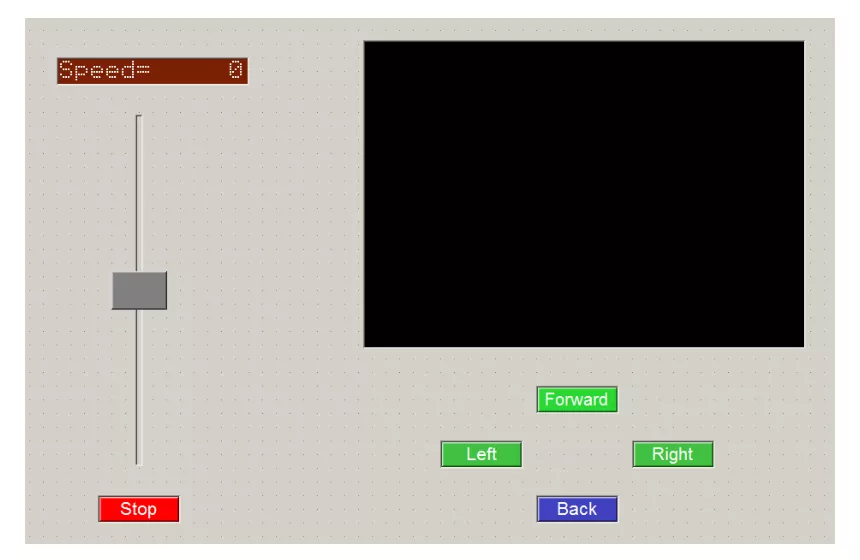
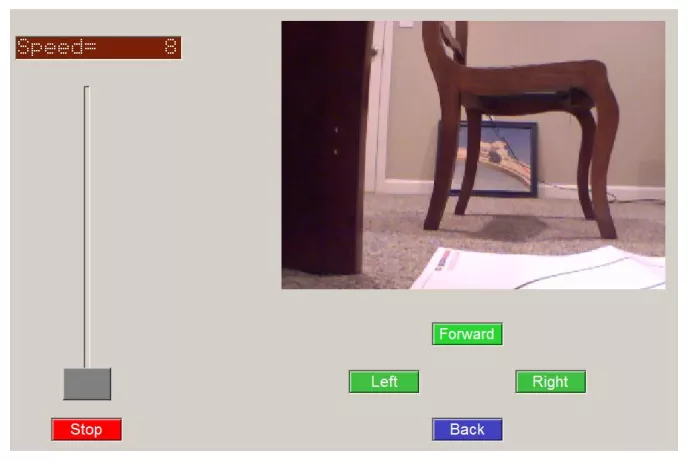
对“panel(面板)”中的所有控件进行调整之后,你的人机交互界面看起来将如下图所示:
切换回主程序的 “Function(功能)”选项卡,点击工具栏中的“Create a new subprogram(创建新的子程序)”图标,命名子程序为“Maneuver”。
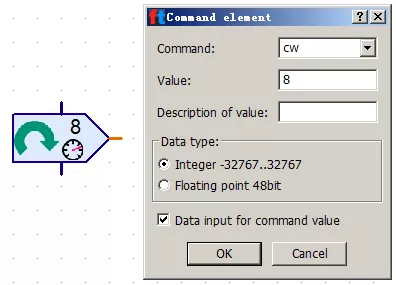
现在在子程序编程窗口中编写程序。这个程序中常用的一个模块是“命令(command)”模块,设置该模块时要勾选“Data input for command value box(为命令提供数值输入)”复选框。参看下图:
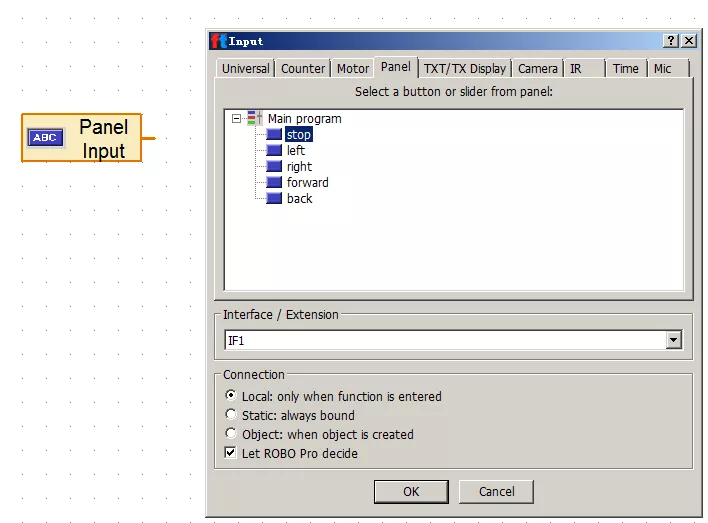
子程序中主要还使用到“Panel input(面板输入)”模块,我们要将面板中建立的各种控件分配给对应的“Panel input(面板输入)”模块。参看下图:
参照下图建立完整的子程序:
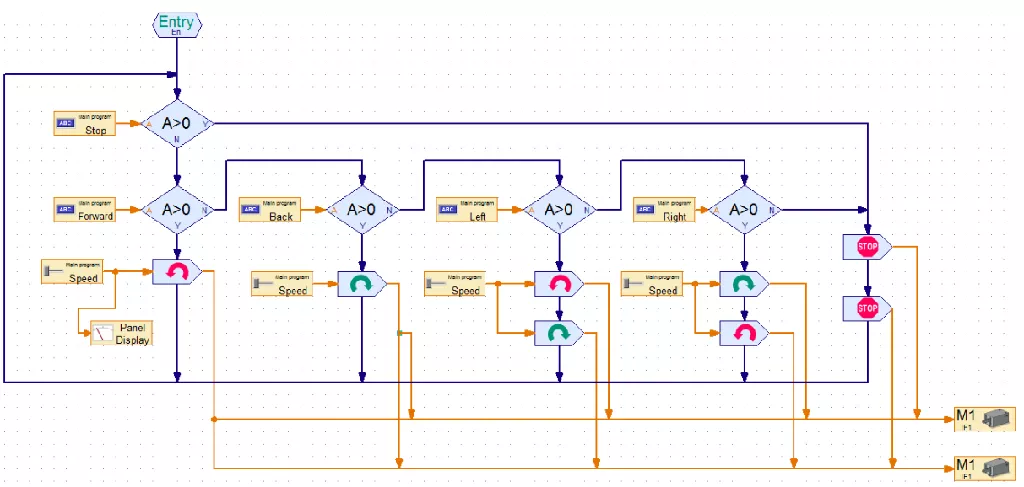
回到主程序的编程界面,参照下图建立主程序。
现在将你的小车通过支架架高在桌面上(便于调试小车)。然后通过USB连接TXT控制器,配置好相关设置后,在线运行该程序,如果通过按钮运行小车时,轮子的转动方向与理想中的不同,调换电机的接线位置。
Wi-Fi 连接
要成为一个真正的远程控制小车,你需要将软件与小车进行无线连接。这要求:1. PC必须有Wi-Fi模块,或者PC端装有USB Wi-Fi适配器。2. ROBOTICS TXT控制器必须打开了Wi-Fi。启动TXT控制器中的无线网络的设置方法如下:
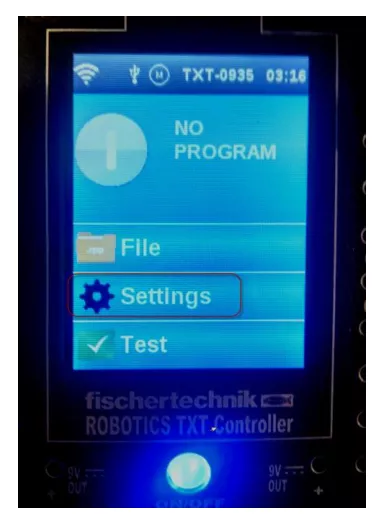
从控制器的主菜单中点击“Setting(设置)”选项。
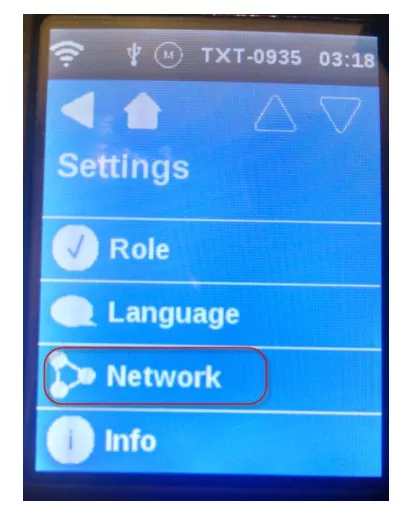
进入后,点击“Network(网络)”选项。
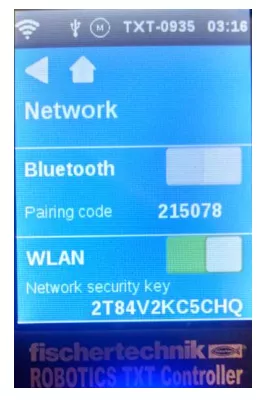
在网络设置窗口中,你将看到WLAN网络设置滑块和安全密钥。现在滑动WLAN旁边的滑动以启动无线网络。
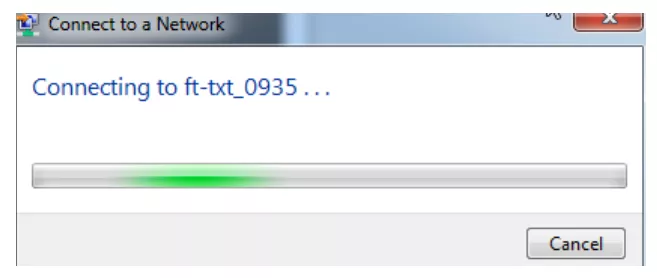
点击你的电脑右下角的网络设置按钮,你将看到列出的TXT控制器。点击你要连接的TXT控制器。

选择“connect(连接)”后,你将看到一个窗口,它显示正在尝试连接。
在弹出的安全密钥对话框中,输入你的TXT控制器上显示的密钥号码(注意字母的大小写)。
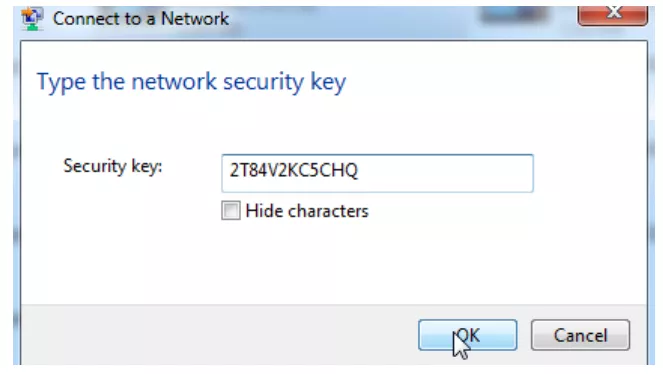
一旦输入了正确的密钥并选择OK,电脑将与TXT控制器建立WLAN连接。
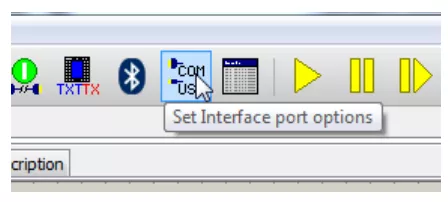
最后一步是在ROBO Pro软件中设置WIFI连接。从工具栏中选择“COM & SUB”选项。
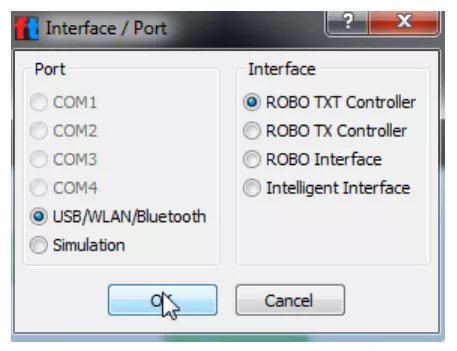
在弹出面板中,选择“USB / WLAN /Bluetooth”和“ROBO TXT Controller”。
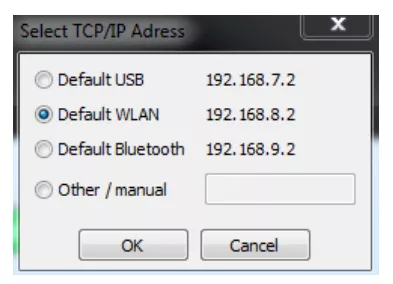
点击“OK”按钮,这将弹出“Select TCP / IP Adress”对话框。 这里要选择“Default WLAN(默认WLAN)”这个选项,点击“OK”按钮。
现在,将你的小车从桌面支架上拿起,放置到平滑的地面上,在线运行你的程序,切换到“panel(面板)”界面,你应该能看到摄像头回传的实时画面,同时还可以用这些按钮控件来操控小车的行进方向。
文章来源: blog.csdn.net,作者:irrationality,版权归原作者所有,如需转载,请联系作者。
原文链接:blog.csdn.net/weixin_54227557/article/details/121720329

- 点赞
- 收藏
- 关注作者
评论(0)