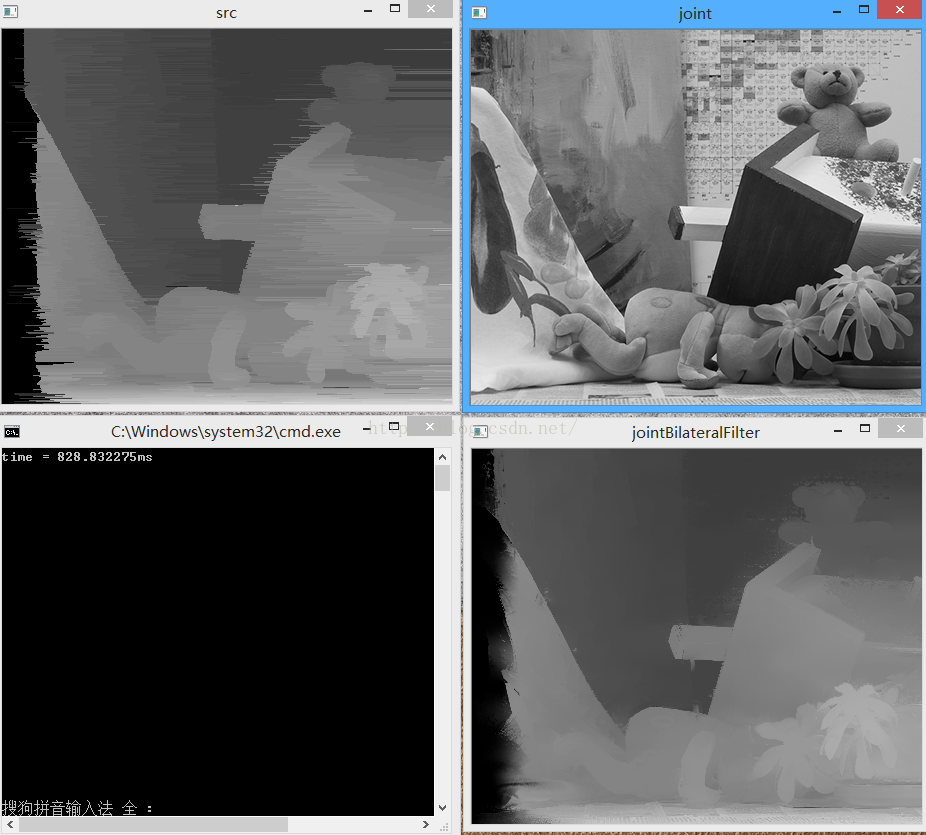
联合双边滤波器(joint bilateral filter) 代码及详细注释【OpenCV】

【摘要】
原理部分可以参看前一篇博客
void jointBilateralFilter(const Mat &src, Mat &dst, int d, double sigma_color, double sigma_space, Mat &joint...
原理部分可以参看前一篇博客
-
void jointBilateralFilter(const Mat &src, Mat &dst, int d, double sigma_color,
-
double sigma_space, Mat &joint = Mat(), int borderType =
-
BORDER_REPLICATE)
-
{
-
Size size = src.size();
-
if (dst.empty())
-
dst = Mat::zeros(src.size(), src.type());
-
-
CV_Assert(
-
(src.type() == CV_8UC1 || src.type() == CV_8UC3)
-
&& src.type() == dst.type() && src.size() == dst.size()
-
&& src.data != dst.data);
-
if (sigma_color <= 0)
-
sigma_color = 1;
-
if (sigma_space <= 0)
-
sigma_space = 1;
-
-
double gauss_color_coeff = -0.5 / (sigma_color * sigma_color);
-
double gauss_space_coeff = -0.5 / (sigma_space * sigma_space);
-
-
if (joint.empty())
-
src.copyTo(joint);
-
-
const int cn = src.channels();
-
const int cnj = joint.channels();
-
-
int radius;
-
if (d <= 0)
-
radius = cvRound(sigma_space * 1.5); // 根据 sigma_space 计算 radius
-
else
-
radius = d / 2;
-
radius = MAX(radius, 1);
-
d = radius * 2 + 1; // 重新计算 像素“矩形”邻域的直径d,确保是奇数
-
-
// 扩展 src 和 joint 长宽各2*radius
-
Mat jim;
-
Mat sim;
-
copyMakeBorder(joint, jim, radius, radius, radius, radius, borderType);
-
copyMakeBorder(src, sim, radius, radius, radius, radius, borderType);
-
-
// cnj: joint的通道数
-
vector<float> _color_weight(cnj * 256);
-
vector<float> _space_weight(d * d); // (2*radius + 1)^2
-
vector<int> _space_ofs_jnt(d * d);
-
vector<int> _space_ofs_src(d * d);
-
float *color_weight = &_color_weight[0];
-
float *space_weight = &_space_weight[0];
-
int *space_ofs_jnt = &_space_ofs_jnt[0];
-
int *space_ofs_src = &_space_ofs_src[0];
-
-
// initialize color-related bilateral filter coefficients
-
// 色差的高斯权重
-
for (int i = 0; i < 256 * cnj; i++)
-
color_weight[i] = (float) std::exp(i * i * gauss_color_coeff);
-
-
int maxk = 0; // 0 - (2*radius + 1)^2
-
// initialize space-related bilateral filter coefficients
-
for (int i = -radius; i <= radius; i++)
-
{
-
for (int j = -radius; j <= radius; j++)
-
{
-
double r = std::sqrt((double) i * i + (double) j * j);
-
if (r > radius)
-
continue;
-
space_weight[maxk] = (float) std::exp(r * r * gauss_space_coeff);
-
space_ofs_jnt[maxk] = (int) (i * jim.step + j * cnj); // joint 邻域内的相对坐标 (i, j)【偏移量】, 左上角为(-radius, -radius),右下角为(radius, radius)
-
space_ofs_src[maxk++] = (int) (i * sim.step + j * cn); // src 邻域内的相对坐标 (i, j)
-
}
-
}
-
#pragma omp parallel for
-
for (int i = 0; i < size.height; i++)
-
{
-
const uchar *jptr = jim.data + (i + radius) * jim.step + radius * cnj; // &jim.ptr(i+radius)[radius]
-
const uchar *sptr = sim.data + (i + radius) * sim.step + radius * cn; // &sim.ptr(i+radius)[radius]
-
uchar *dptr = dst.data + i * dst.step; // dst.ptr(i)
-
-
// src 和 joint 通道数不同的四种情况
-
if (cn == 1 && cnj == 1)
-
{
-
for (int j = 0; j < size.width; j++)
-
{
-
float sum = 0, wsum = 0;
-
int val0 = jptr[j]; // jim.ptr(i + radius)[j + radius]
-
-
for (int k = 0; k < maxk; k++)
-
{
-
int val = jptr[j + space_ofs_src[k]]; // jim.ptr(i + radius + offset_x)[j + radius + offset_y]
-
int val2 = sptr[j + space_ofs_src[k]]; // sim.ptr(i + radius + offset_x)[j + radius + offset_y]
-
-
// 根据joint当前像素和邻域像素的 距离权重 和 色差权重,计算综合的权重
-
float w = space_weight[k]
-
* color_weight[std::abs(val - val0)];
-
sum += val2 * w; // 统计 src 邻域内的像素带权和
-
wsum += w; // 统计权重和
-
}
-
// overflow is not possible here => there is no need to use CV_CAST_8U
-
// 归一化 src 邻域内的像素带权和,并赋给 dst对应的像素
-
dptr[j] = (uchar) cvRound(sum / wsum);
-
}
-
}
-
else if (cn == 3 && cnj == 3)
-
{
-
for (int j = 0; j < size.width * 3; j += 3)
-
{
-
float sum_b = 0, sum_g = 0, sum_r = 0, wsum = 0;
-
int b0 = jptr[j], g0 = jptr[j + 1], r0 = jptr[j + 2]; // jim.ptr(i + radius)[j + radius][0...2]
-
for (int k = 0; k < maxk; k++)
-
{
-
const uchar *sptr_k = jptr + j + space_ofs_src[k];
-
const uchar *sptr_k2 = sptr + j + space_ofs_src[k];
-
-
int b = sptr_k[0], g = sptr_k[1], r = sptr_k[2]; // jim.ptr(i + radius + offset_x)[j + radius + offset_y][0...2]
-
float w = space_weight[k]
-
* color_weight[std::abs(b - b0) + std::abs(g - g0)
-
+ std::abs(r - r0)];
-
sum_b += sptr_k2[0] * w; // sim.ptr(i + radius + offset_x)[j + radius + offset_y][0...2]
-
sum_g += sptr_k2[1] * w;
-
sum_r += sptr_k2[2] * w;
-
wsum += w;
-
}
-
wsum = 1.f / wsum;
-
b0 = cvRound(sum_b * wsum);
-
g0 = cvRound(sum_g * wsum);
-
r0 = cvRound(sum_r * wsum);
-
dptr[j] = (uchar) b0;
-
dptr[j + 1] = (uchar) g0;
-
dptr[j + 2] = (uchar) r0;
-
}
-
}
-
else if (cn == 1 && cnj == 3)
-
{
-
for (int j = 0, l = 0; j < size.width * 3; j += 3, l++)
-
{
-
float sum_b = 0, wsum = 0;
-
-
int b0 = jptr[j], g0 = jptr[j + 1], r0 = jptr[j + 2]; // jim.ptr(i + radius)[j + radius][0...2]
-
for (int k = 0; k < maxk; k++)
-
{
-
int val = *(sptr + l + space_ofs_src[k]); // sim.ptr(i + radius + offset_x)[l + radius + offset_y]
-
-
const uchar *sptr_k = jptr + j + space_ofs_jnt[k];
-
int b = sptr_k[0], g = sptr_k[1], r = sptr_k[2]; // jim.ptr(i + radius + offset_x)[j + radius + offset_y][0...2]
-
-
float w = space_weight[k]
-
* color_weight[std::abs(b - b0) + std::abs(g - g0)
-
+ std::abs(r - r0)];
-
sum_b += val * w;
-
wsum += w;
-
}
-
wsum = 1.f / wsum;
-
b0 = cvRound(sum_b * wsum);
-
dptr[l] = (uchar) b0;
-
}
-
}
-
else if (cn == 3 && cnj == 1)
-
{
-
for (int j = 0, l = 0; j < size.width * 3; j += 3, l++)
-
{
-
float sum_b = 0, sum_g = 0, sum_r = 0, wsum = 0;
-
int val0 = jptr[l]; // jim.ptr(i + radius)[l + radius]
-
for (int k = 0; k < maxk; k++)
-
{
-
int val = jptr[l + space_ofs_jnt[k]]; // jim.ptr(i + radius + offset_x)[l + radius + offset_y]
-
-
const uchar *sptr_k = sptr + j + space_ofs_src[k]; // sim.ptr(i + radius + offset_x)[j + radius + offset_y]
-
-
float w = space_weight[k]
-
* color_weight[std::abs(val - val0)];
-
-
sum_b += sptr_k[0] * w; // sim.ptr(i + radius + offset_x)[j + radius + offset_y] [0...2]
-
sum_g += sptr_k[1] * w;
-
sum_r += sptr_k[2] * w;
-
wsum += w;
-
}
-
-
// overflow is not possible here => there is no need to use CV_CAST_8U
-
wsum = 1.f / wsum;
-
dptr[j] = (uchar) cvRound(sum_b * wsum);
-
dptr[j + 1] = (uchar) cvRound(sum_g * wsum);
-
dptr[j + 2] = (uchar) cvRound(sum_r * wsum);
-
}
-
}
-
}
-
}
文章来源: panda1234lee.blog.csdn.net,作者:panda1234lee,版权归原作者所有,如需转载,请联系作者。
原文链接:panda1234lee.blog.csdn.net/article/details/52858124

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)