AEJoy —— 表达式之反向动力学(Inverse Kinematics)【三】【JS】

【摘要】
效果图
一个使用反向运动学表达式进行绑定的 “cut out” 人物的例子
设计
一旦你有了锚点,定位身体部分并建立父子级关系。你要让躯干成为上肢的父级,上肢成为下肢的父级,下肢成为肢端的父级。...
效果图
一个使用反向运动学表达式进行绑定的 “cut out” 人物的例子

设计
一旦你有了锚点,定位身体部分并建立父子级关系。你要让躯干成为上肢的父级,上肢成为下肢的父级,下肢成为肢端的父级。然后你需要添加效应器层。我使用了 10x10 的纯色层(不要忘记制作这些指导层- 图层 > 指导层)。定位效应器层,使它们处于与肢端锚点相同的位置。现在留着没有父级的效应器(我们很快会回到这一点)。下图显示了我的角色各个部分的父子关系:

注意,我给角色的身体部分命名是参考我的左右,而不是角色的左右。这解释了为什么代码将左臂定义为逆时针弯曲(如果您想知道的话)。我发现这么标记更容易理解,但如果你觉得另一种方法更好的话,你也可以用其他方法。
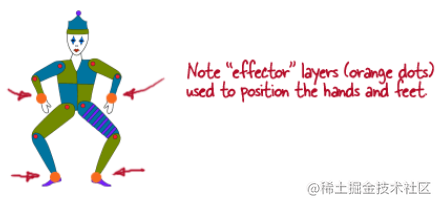
下面是一个完整装配(添加了效应器层)的角色的示图:
注意:“ effector” 层(橙色点)用于放置手、脚*
一旦你完全绑定了角色,你可能想要锁定肢体和肢端层。这
文章来源: panda1234lee.blog.csdn.net,作者:panda1234lee,版权归原作者所有,如需转载,请联系作者。
原文链接:panda1234lee.blog.csdn.net/article/details/121073175

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)