机器人工程专业实践镜像2021版-功能扩展-coppeliasim+webots

【摘要】
镜像虽然提供了大部分课程所需功能,但同样支持扩展。这里以两款仿真软件为例
coppeliasimwebots
其实就是在官网下载,解压到硬盘就可以使用的。
分别解压就行。
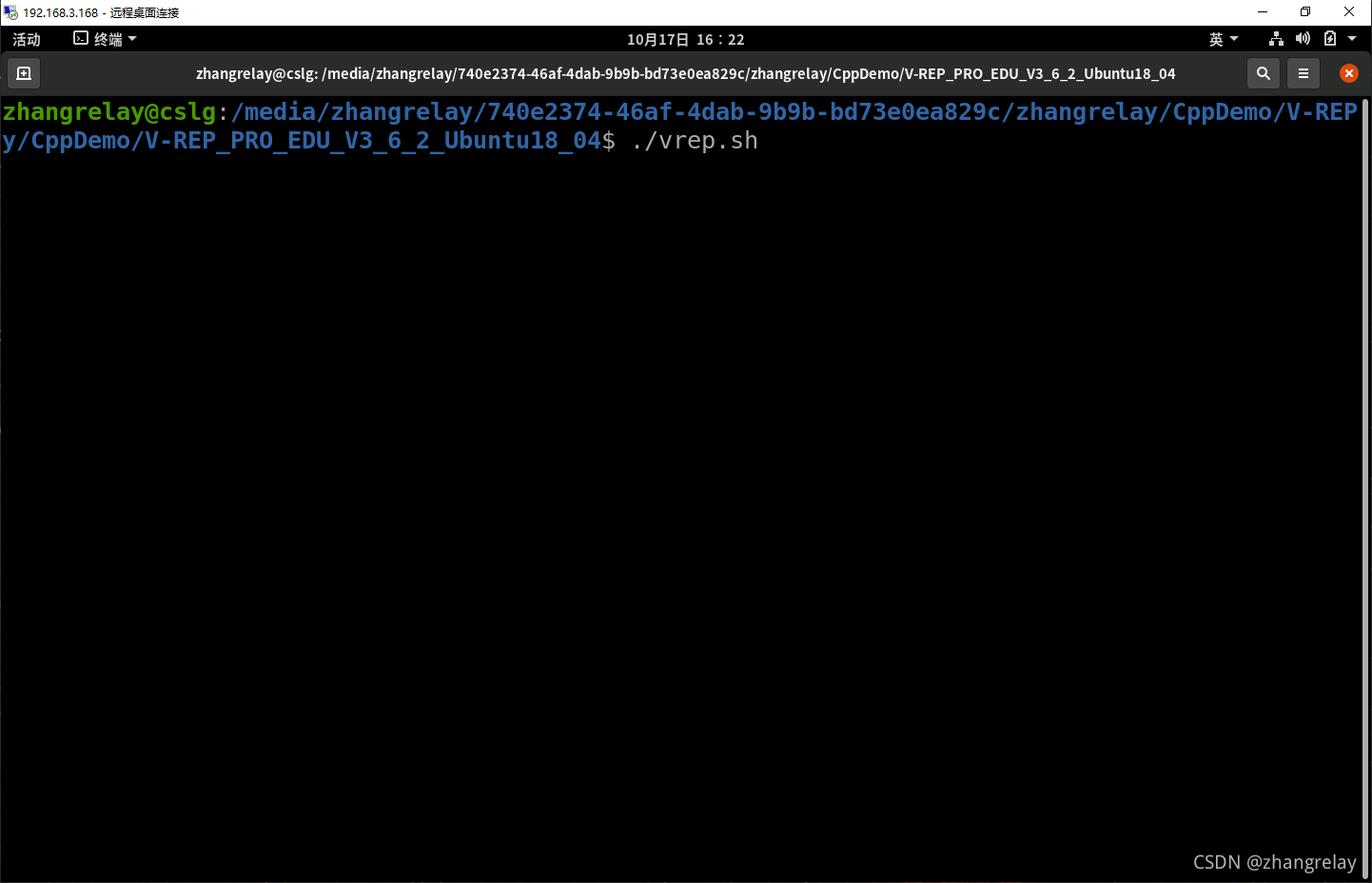
启动V-Rep(新版为coppeliasim) :
./vrep.sh
启动webots:
./webots
等待启动完成,即...
镜像虽然提供了大部分课程所需功能,但同样支持扩展。这里以两款仿真软件为例
- coppeliasim
- webots
其实就是在官网下载,解压到硬盘就可以使用的。
分别解压就行。
启动V-Rep(新版为coppeliasim) :
- ./vrep.sh
启动webots:
- ./webots
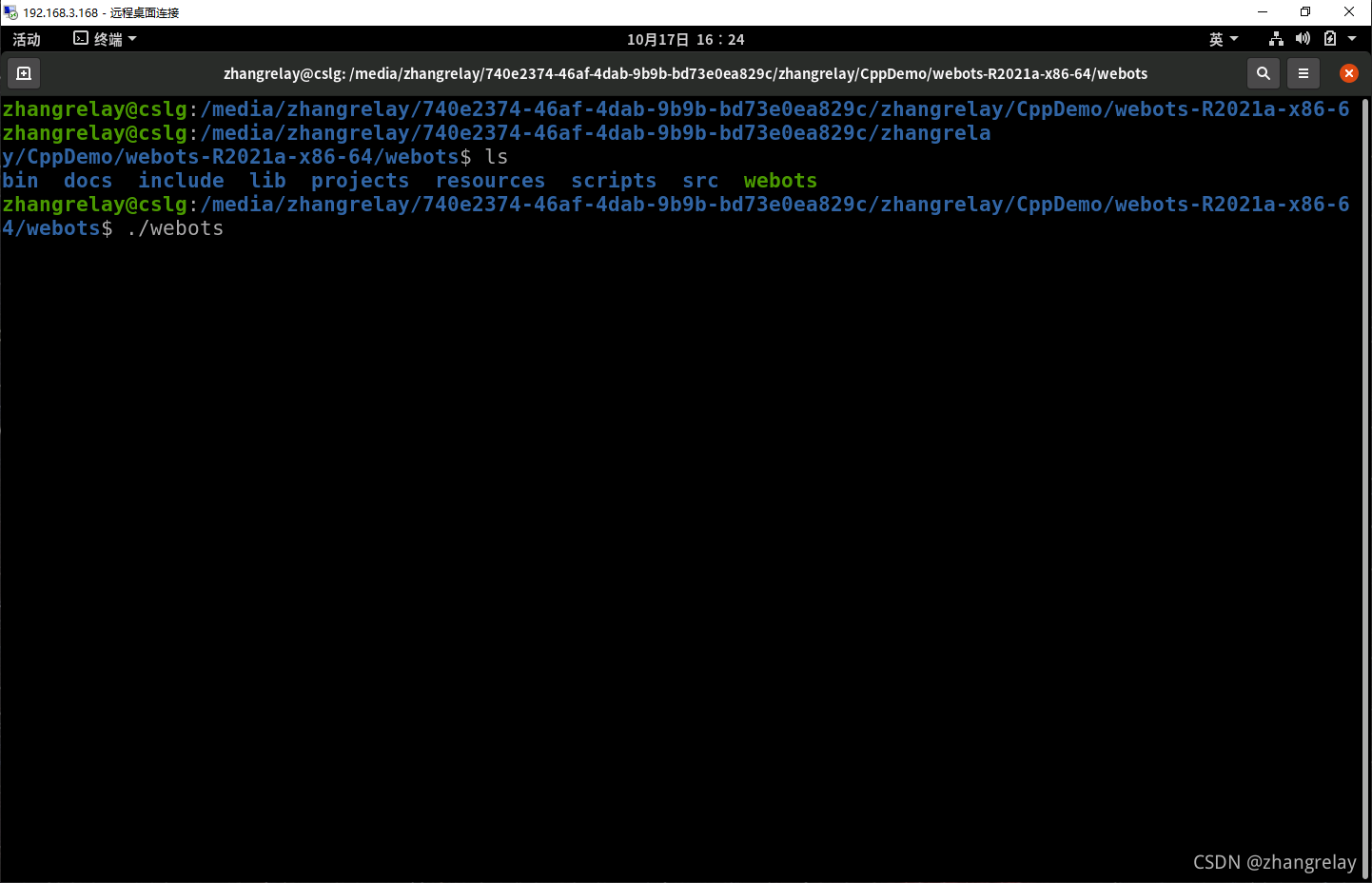
等待启动完成,即可愉快玩耍。忽略更新。
缺少的功能包依据上学期课程讲解,或者依据提示补充安装即可。
现在打开一个cpp案例:
尝试一下编译:
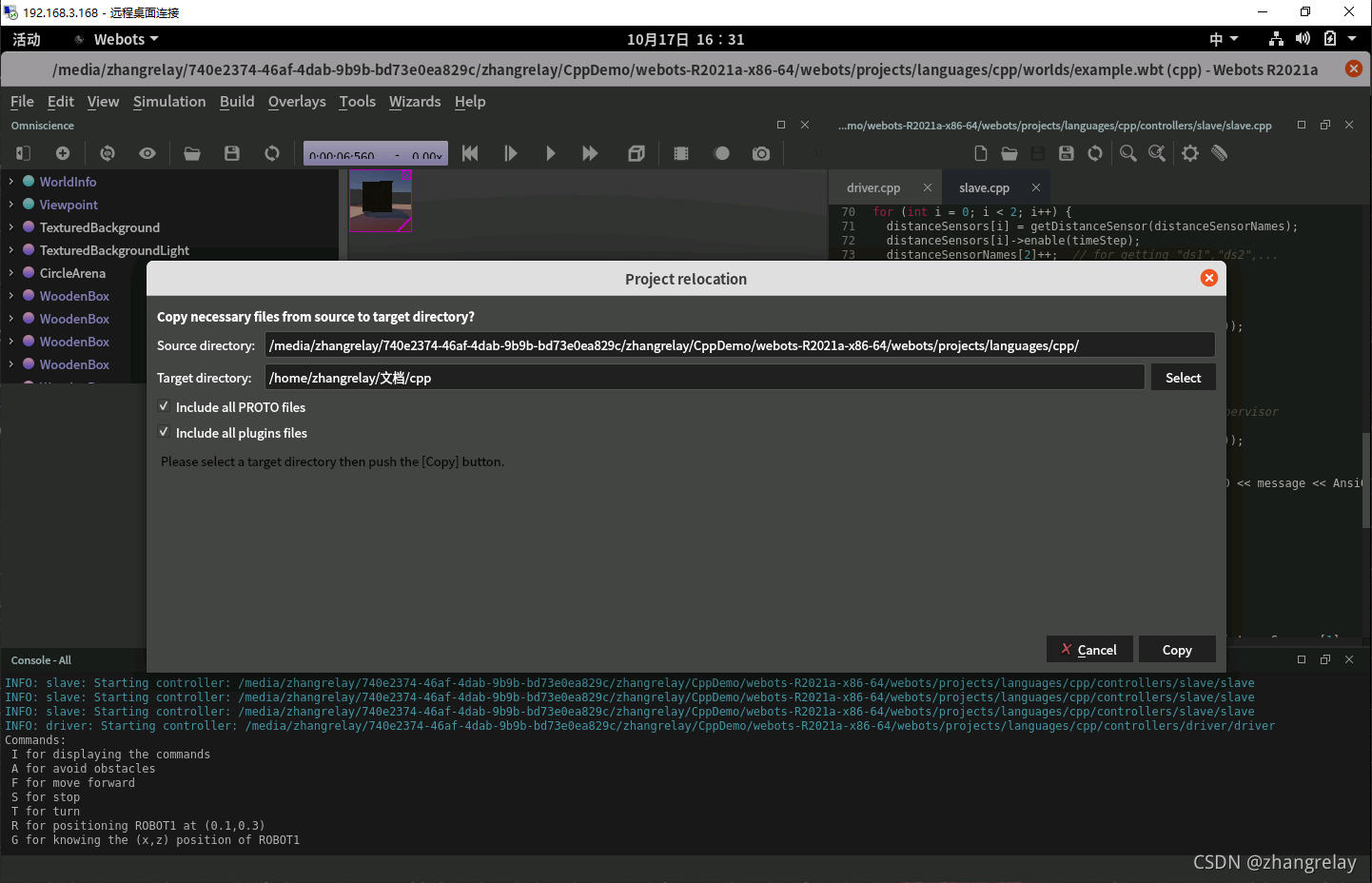
完全可以正常使用。
-
void Driver::displayHelp() {
-
string s("Commands:\n"
-
" 这只是一个测试^_^\n"
-
" I for displaying the commands\n"
-
" A for avoid obstacles\n"
-
" F for move forward\n"
-
" S for stop\n"
-
" T for turn\n"
-
" R for positioning ROBOT1 at (0.1,0.3)\n"
-
" G for knowing the (x,z) position of ROBOT1");
-
cout << s << endl;
-
}
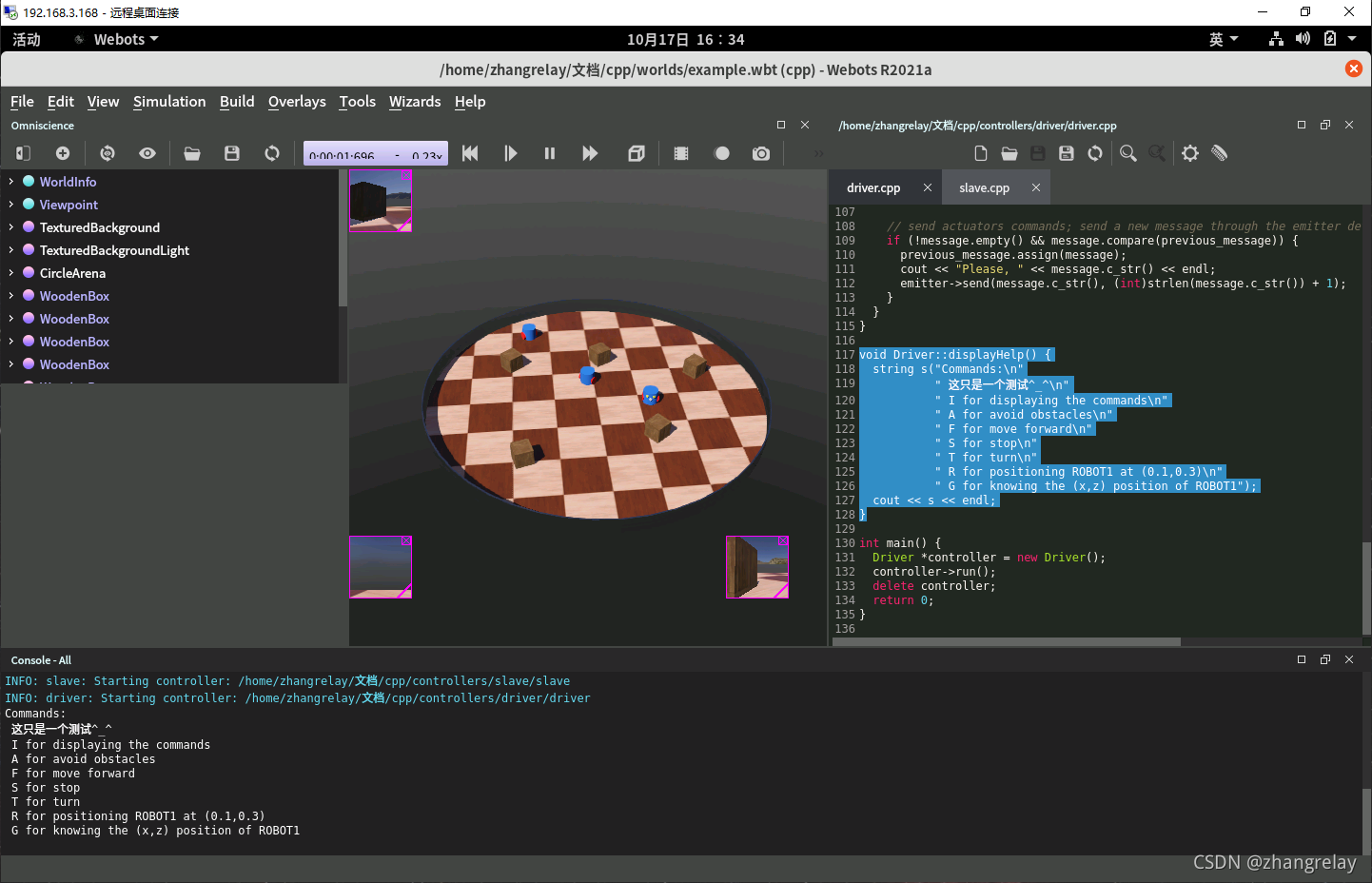

webots中C++的案例都可以直接编译后使用,非常方便。
更多案例自主学习即可。
-
// Copyright 1996-2020 Cyberbotics Ltd.
-
//
-
// Licensed under the Apache License, Version 2.0 (the "License");
-
// you may not use this file except in compliance with the License.
-
// You may obtain a copy of the License at
-
//
-
// http://www.apache.org/licenses/LICENSE-2.0
-
//
-
// Unless required by applicable law or agreed to in writing, software
-
// distributed under the License is distributed on an "AS IS" BASIS,
-
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-
// See the License for the specific language governing permissions and
-
// limitations under the License.
-
-
/*
-
* Description: This controller gives to its node the following behavior:
-
* Listen the keyboard. According to the pressed key, send a
-
* message through an emitter or handle the position of Robot1
-
*/
-
-
#include <webots/Emitter.hpp>
-
#include <webots/Field.hpp>
-
#include <webots/Keyboard.hpp>
-
#include <webots/Node.hpp>
-
#include <webots/Supervisor.hpp>
-
-
#include <stdlib.h>
-
#include <cstring>
-
#include <iostream>
-
#include <string>
-
-
using namespace std;
-
using namespace webots;
-
-
class Driver : public Supervisor {
-
public:
-
Driver();
-
void run();
-
-
private:
-
static void displayHelp();
-
int timeStep;
-
Emitter *emitter;
-
Field *translationField;
-
Keyboard *keyboard;
-
double x;
-
double z;
-
double translation[3];
-
};
-
-
Driver::Driver() {
-
timeStep = 128;
-
x = 0.1f;
-
z = 0.3f;
-
translation[0] = x;
-
translation[1] = 0;
-
translation[2] = z;
-
emitter = getEmitter("emitter");
-
Node *robot = getFromDef("ROBOT1");
-
if (!robot)
-
// robot might be NULL if the controller is about to quit
-
exit(1);
-
-
translationField = robot->getField("translation");
-
keyboard = getKeyboard();
-
keyboard->enable(timeStep);
-
}
-
-
void Driver::run() {
-
string previous_message("");
-
string message("");
-
-
displayHelp();
-
-
// main loop
-
while (step(timeStep) != -1) {
-
// Read sensors; update message according to the pressed keyboard key
-
int k = keyboard->getKey();
-
switch (k) {
-
case 'A':
-
message.assign("avoid obstacles");
-
break;
-
case 'F':
-
message.assign("move forward");
-
break;
-
case 'S':
-
message.assign("stop");
-
break;
-
case 'T':
-
message.assign("turn");
-
break;
-
case 'I':
-
displayHelp();
-
break;
-
case 'G': {
-
const double *translationValues = translationField->getSFVec3f();
-
cout << "ROBOT1 is located at (" << translationValues[0] << "," << translationValues[2] << ")" << endl;
-
break;
-
}
-
case 'R':
-
cout << "Teleport ROBOT1 at (" << x << "," << z << ")" << endl;
-
translationField->setSFVec3f(translation);
-
break;
-
default:
-
message.clear();
-
}
-
-
// send actuators commands; send a new message through the emitter device
-
if (!message.empty() && message.compare(previous_message)) {
-
previous_message.assign(message);
-
cout << "Please, " << message.c_str() << endl;
-
emitter->send(message.c_str(), (int)strlen(message.c_str()) + 1);
-
}
-
}
-
}
-
-
void Driver::displayHelp() {
-
string s("Commands:\n"
-
" 这只是一个测试^_^\n"
-
" I for displaying the commands\n"
-
" A for avoid obstacles\n"
-
" F for move forward\n"
-
" S for stop\n"
-
" T for turn\n"
-
" R for positioning ROBOT1 at (0.1,0.3)\n"
-
" G for knowing the (x,z) position of ROBOT1");
-
cout << s << endl;
-
}
-
-
int main() {
-
Driver *controller = new Driver();
-
controller->run();
-
delete controller;
-
return 0;
-
}
-
// Copyright 1996-2020 Cyberbotics Ltd.
-
//
-
// Licensed under the Apache License, Version 2.0 (the "License");
-
// you may not use this file except in compliance with the License.
-
// You may obtain a copy of the License at
-
//
-
// http://www.apache.org/licenses/LICENSE-2.0
-
//
-
// Unless required by applicable law or agreed to in writing, software
-
// distributed under the License is distributed on an "AS IS" BASIS,
-
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-
// See the License for the specific language governing permissions and
-
// limitations under the License.
-
-
/*
-
* Description: This controller gives to its robot the following behavior:
-
* According to the messages it receives, the robot change its
-
* behavior.
-
*/
-
-
#include <webots/Camera.hpp>
-
#include <webots/DistanceSensor.hpp>
-
#include <webots/Motor.hpp>
-
#include <webots/Receiver.hpp>
-
#include <webots/Robot.hpp>
-
#include <webots/utils/AnsiCodes.hpp>
-
-
#include <algorithm>
-
#include <iostream>
-
#include <limits>
-
#include <string>
-
-
using namespace std;
-
using namespace webots;
-
-
static const double maxSpeed = 10.0;
-
-
class Slave : public Robot {
-
public:
-
Slave();
-
void run();
-
-
private:
-
enum Mode { STOP, MOVE_FORWARD, AVOID_OBSTACLES, TURN };
-
-
static double boundSpeed(double speed);
-
-
int timeStep;
-
Mode mode;
-
Receiver *receiver;
-
Camera *camera;
-
DistanceSensor *distanceSensors[2];
-
Motor *motors[2];
-
};
-
-
Slave::Slave() {
-
timeStep = 32;
-
mode = AVOID_OBSTACLES;
-
camera = getCamera("camera");
-
camera->enable(4 * timeStep);
-
receiver = getReceiver("receiver");
-
receiver->enable(timeStep);
-
motors[0] = getMotor("left wheel motor");
-
motors[1] = getMotor("right wheel motor");
-
motors[0]->setPosition(std::numeric_limits<double>::infinity());
-
motors[1]->setPosition(std::numeric_limits<double>::infinity());
-
motors[0]->setVelocity(0.0);
-
motors[1]->setVelocity(0.0);
-
string distanceSensorNames("ds0");
-
for (int i = 0; i < 2; i++) {
-
distanceSensors[i] = getDistanceSensor(distanceSensorNames);
-
distanceSensors[i]->enable(timeStep);
-
distanceSensorNames[2]++; // for getting "ds1","ds2",...
-
}
-
}
-
-
double Slave::boundSpeed(double speed) {
-
return std::min(maxSpeed, std::max(-maxSpeed, speed));
-
}
-
-
void Slave::run() {
-
// main loop
-
while (step(timeStep) != -1) {
-
// Read sensors, particularly the order of the supervisor
-
if (receiver->getQueueLength() > 0) {
-
string message((const char *)receiver->getData());
-
receiver->nextPacket();
-
-
cout << "I should " << AnsiCodes::RED_FOREGROUND << message << AnsiCodes::RESET << "!" << endl;
-
-
if (message.compare("avoid obstacles") == 0)
-
mode = AVOID_OBSTACLES;
-
else if (message.compare("move forward") == 0)
-
mode = MOVE_FORWARD;
-
else if (message.compare("stop") == 0)
-
mode = STOP;
-
else if (message.compare("turn") == 0)
-
mode = TURN;
-
}
-
double delta = distanceSensors[0]->getValue() - distanceSensors[1]->getValue();
-
double speeds[2] = {0.0, 0.0};
-
-
// send actuators commands according to the mode
-
switch (mode) {
-
case AVOID_OBSTACLES:
-
speeds[0] = boundSpeed(maxSpeed / 2.0 + 0.1 * delta);
-
speeds[1] = boundSpeed(maxSpeed / 2.0 - 0.1 * delta);
-
break;
-
case MOVE_FORWARD:
-
speeds[0] = maxSpeed;
-
speeds[1] = maxSpeed;
-
break;
-
case TURN:
-
speeds[0] = maxSpeed / 2.0;
-
speeds[1] = -maxSpeed / 2.0;
-
break;
-
default:
-
break;
-
}
-
motors[0]->setVelocity(speeds[0]);
-
motors[1]->setVelocity(speeds[1]);
-
}
-
}
-
-
int main() {
-
Slave *controller = new Slave();
-
controller->run();
-
delete controller;
-
return 0;
-
}
-End-
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/120812159

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)