plotjuggler⬅ROS1/ROS2画轨迹神器➡rqt_plot+rqt_multiplot之超级加强版

【摘要】
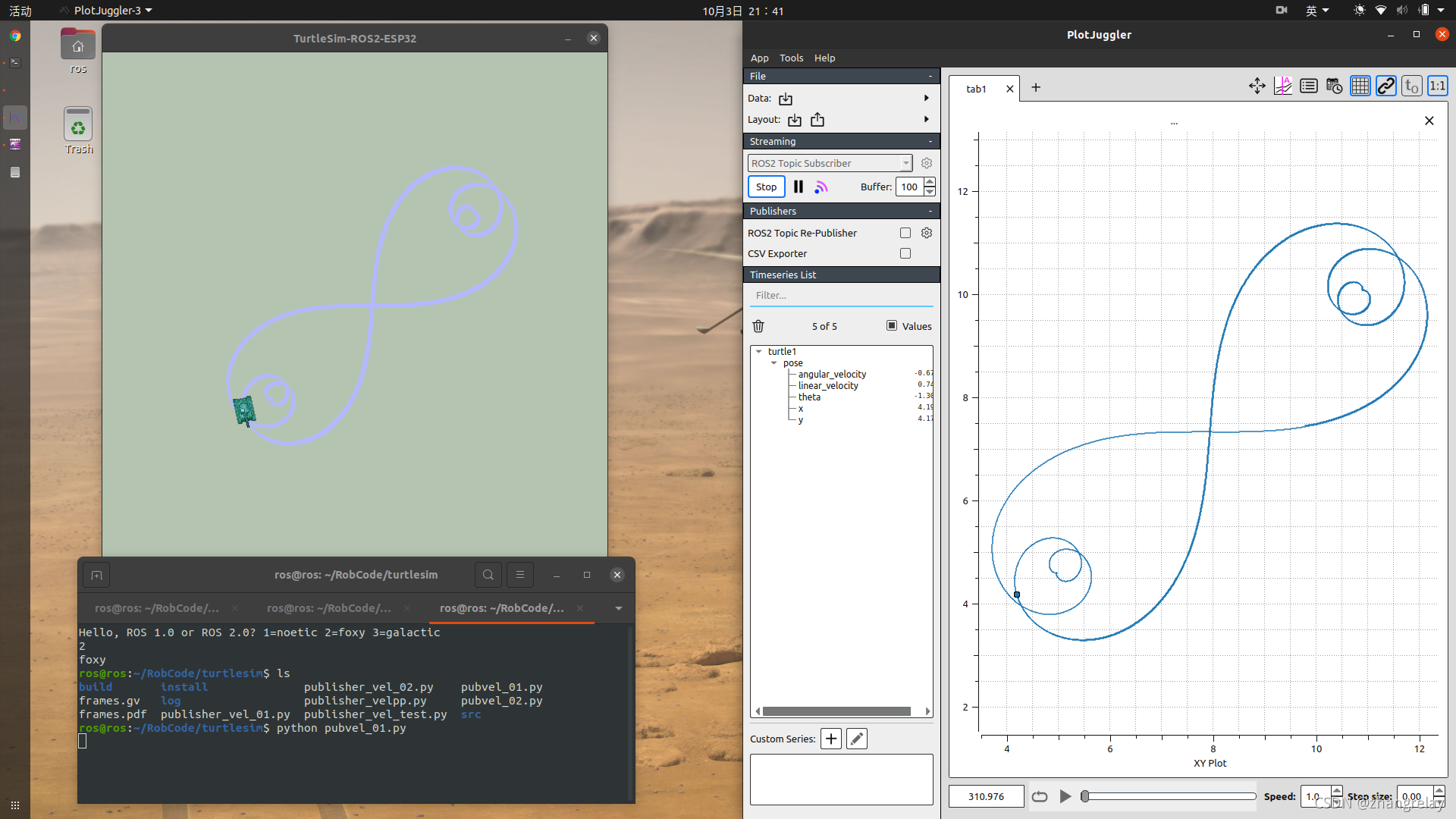
先看效果(turtlesim):
再看 (mobot):
很显然,同样的开环控制指令(速度指令),画出了不同轨迹。心❤形状也有差异。
如何构造相似的轨迹,应用于模型相似的机器人,后续给出闭环控制算法的效果。
安装:
sudo apt install ros-xxx-plotjugglersudo apt instal...
先看效果(turtlesim):
再看 (mobot):
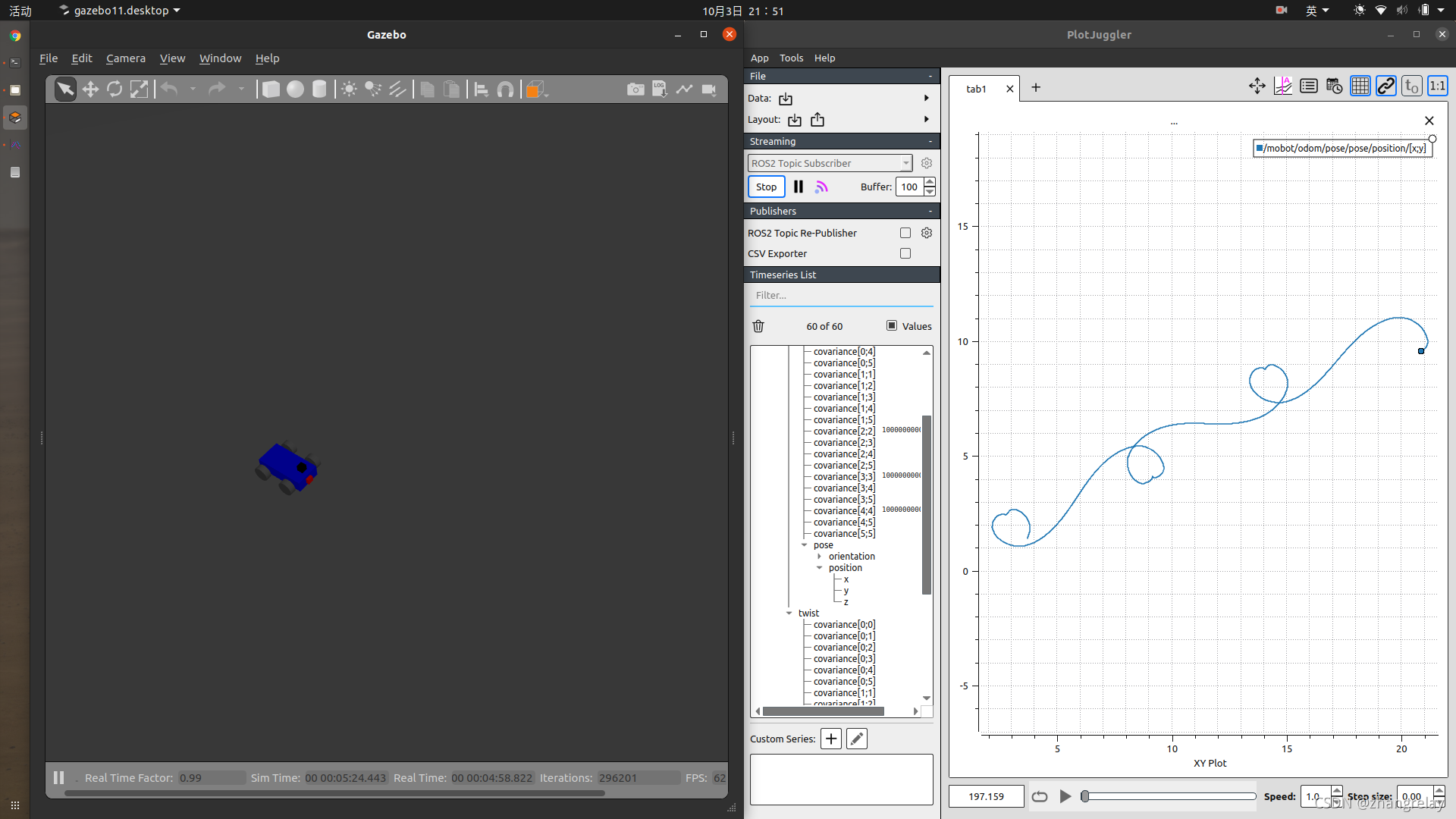
很显然,同样的开环控制指令(速度指令),画出了不同轨迹。心❤形状也有差异。
如何构造相似的轨迹,应用于模型相似的机器人,后续给出闭环控制算法的效果。
安装:
- sudo apt install ros-xxx-plotjuggler
- sudo apt install ros-xxx-plotjuggler-ros
xxx--noetic,foxy,galactic均可。
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/120598986

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)