查看 PCD 点云 windows

【摘要】 在Linux系统查看PCD 点云有许多方法,但发现在windows下的工具比较少,这里分享两个思路,一个是使用MATLAB工具编程,另一个是下载CloudCompare软件进行查看点云。
前言
在Linux系统查看PCD 点云有许多方法,但发现在windows下的工具比较少,这里分享两个思路,一个是使用MATLAB工具编程,另一个是下载CloudCompare软件进行查看点云。
一、CloudCompare软件
1.1 CloudCompare软件简介
官网地址:
CloudCompare 目前可在 Windows、macOS 和 Linux 上运行。允许出于任何目的,自由使用它们,包括商业目的或教育目的。 这种自由GNU 通用公共许可证 (GPL) 定义。
![]()
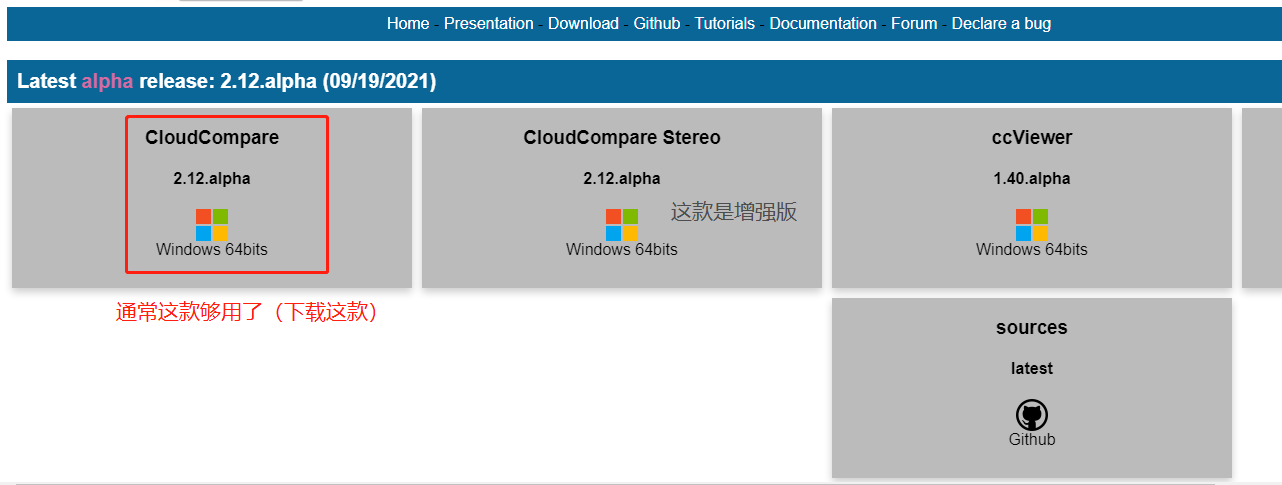
1.2 CloudCompare下载安装
点击下载xxx.exe,然后默认安装即可。
![]()
1.3 查看PCD
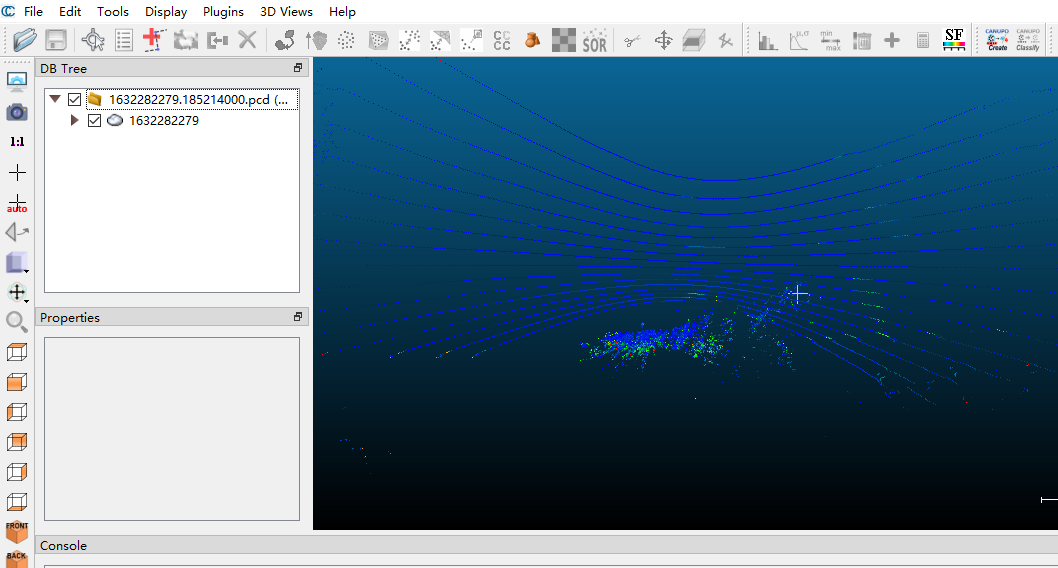
打开软件CloudCompare,然后选择PCD文件,加载PCD

![]()
看到成功加载PCD了
![]()
二、MATLAB工具编程
我使用的是2020b版本的,它们查看点云数据
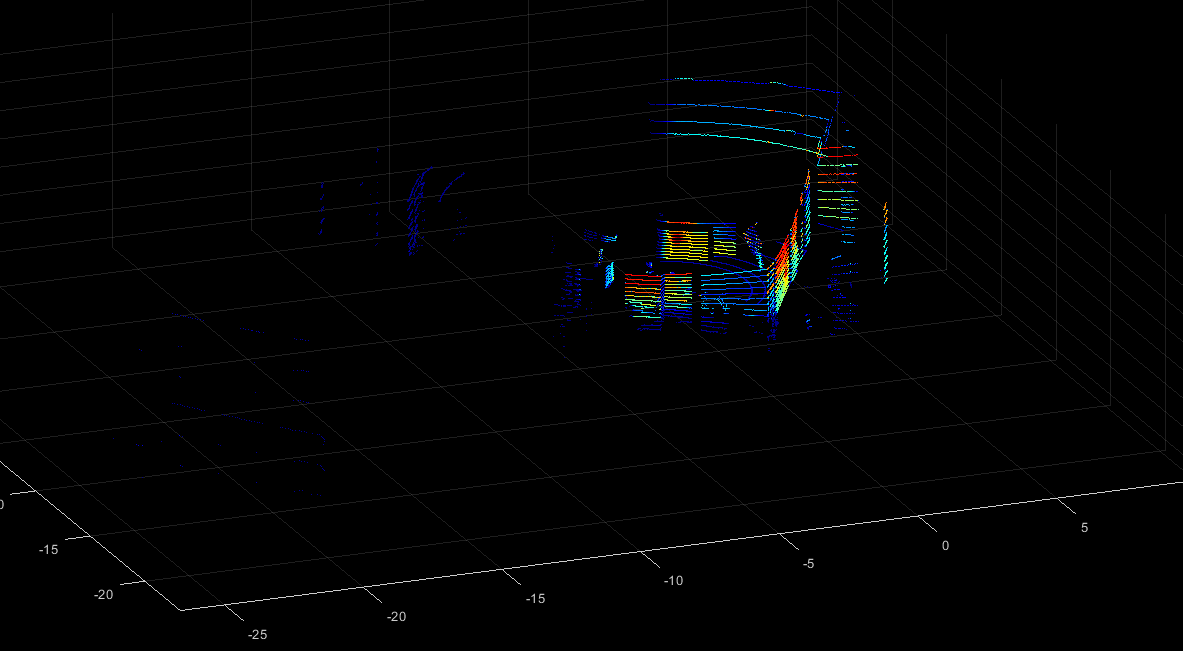
案例1,打开一个pcd文件,打码如下:
ptCloud = pcread('E:\Program Files\Polyspace\R2020b\toolbox\lidar\lidardata\lcc\vlp16\pointCloud\0001.pcd');
pcshow(ptCloud)
title('Input Point Cloud')
效果如下:
![]()
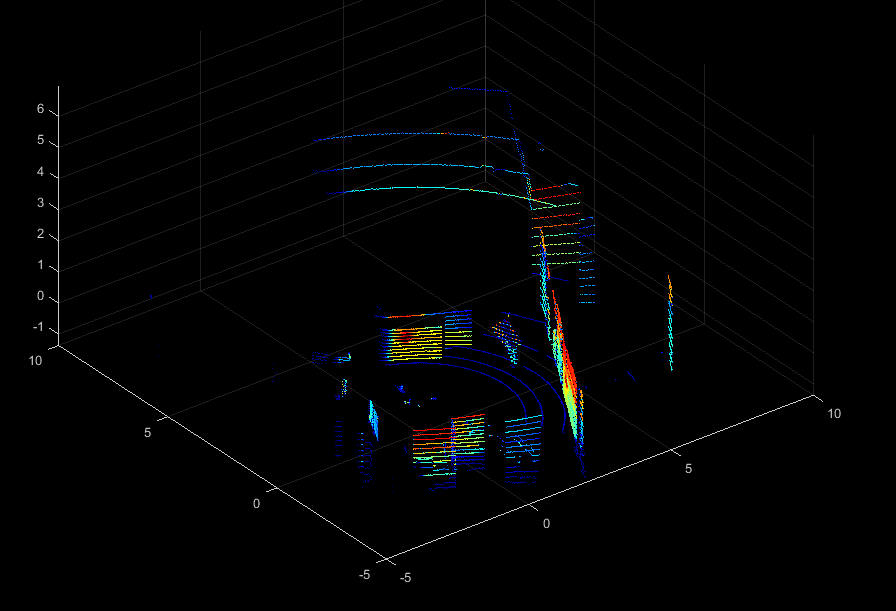
案例2,打开一个pcd文件,并设置xy范围限制,打码如下:
ptCloud = pcread('E:\Program Files\Polyspace\R2020b\toolbox\lidar\lidardata\lcc\vlp16\pointCloud\0001.pcd');
pcshow(ptCloud)
title('Input Point Cloud')
xlim([-5 10])
ylim([-5 10])效果如下:

【声明】本内容来自华为云开发者社区博主,不代表华为云及华为云开发者社区的观点和立场。转载时必须标注文章的来源(华为云社区)、文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)