Nav2极简笔记03-启动文件launch

【摘要】
回顾一下,tb3_simulation_launch.py :
"""This is all-in-one launch script intended for use by nav2 developers.""" import os from ament_index_python.packages import get_packag...
回顾一下,tb3_simulation_launch.py :
-
"""This is all-in-one launch script intended for use by nav2 developers."""
-
-
import os
-
-
from ament_index_python.packages import get_package_share_directory
-
-
from launch import LaunchDescription
-
from launch.actions import DeclareLaunchArgument, ExecuteProcess, IncludeLaunchDescription
-
from launch.conditions import IfCondition
-
from launch.launch_description_sources import PythonLaunchDescriptionSource
-
from launch.substitutions import LaunchConfiguration, PythonExpression
-
from launch_ros.actions import Node
-
-
-
def generate_launch_description():
-
# Get the launch directory
-
bringup_dir = get_package_share_directory('nav2_bringup')
-
launch_dir = os.path.join(bringup_dir, 'launch')
-
-
# Create the launch configuration variables
-
slam = LaunchConfiguration('slam')
-
namespace = LaunchConfiguration('namespace')
-
use_namespace = LaunchConfiguration('use_namespace')
-
map_yaml_file = LaunchConfiguration('map')
-
use_sim_time = LaunchConfiguration('use_sim_time')
-
params_file = LaunchConfiguration('params_file')
-
default_bt_xml_filename = LaunchConfiguration('default_bt_xml_filename')
-
autostart = LaunchConfiguration('autostart')
-
-
# Launch configuration variables specific to simulation
-
rviz_config_file = LaunchConfiguration('rviz_config_file')
-
use_simulator = LaunchConfiguration('use_simulator')
-
use_robot_state_pub = LaunchConfiguration('use_robot_state_pub')
-
use_rviz = LaunchConfiguration('use_rviz')
-
headless = LaunchConfiguration('headless')
-
world = LaunchConfiguration('world')
-
-
# Map fully qualified names to relative ones so the node's namespace can be prepended.
-
# In case of the transforms (tf), currently, there doesn't seem to be a better alternative
-
# https://github.com/ros/geometry2/issues/32
-
# https://github.com/ros/robot_state_publisher/pull/30
-
# TODO(orduno) Substitute with `PushNodeRemapping`
-
# https://github.com/ros2/launch_ros/issues/56
-
remappings = [('/tf', 'tf'),
-
('/tf_static', 'tf_static')]
-
-
# Declare the launch arguments
-
declare_namespace_cmd = DeclareLaunchArgument(
-
'namespace',
-
default_value='',
-
description='Top-level namespace')
-
-
declare_use_namespace_cmd = DeclareLaunchArgument(
-
'use_namespace',
-
default_value='false',
-
description='Whether to apply a namespace to the navigation stack')
-
-
declare_slam_cmd = DeclareLaunchArgument(
-
'slam',
-
default_value='False',
-
description='Whether run a SLAM')
-
-
declare_map_yaml_cmd = DeclareLaunchArgument(
-
'map',
-
default_value=os.path.join(bringup_dir, 'maps', 'turtlebot3_world.yaml'),
-
description='Full path to map file to load')
-
-
declare_use_sim_time_cmd = DeclareLaunchArgument(
-
'use_sim_time',
-
default_value='true',
-
description='Use simulation (Gazebo) clock if true')
-
-
declare_params_file_cmd = DeclareLaunchArgument(
-
'params_file',
-
default_value=os.path.join(bringup_dir, 'params', 'nav2_params.yaml'),
-
description='Full path to the ROS2 parameters file to use for all launched nodes')
-
-
declare_bt_xml_cmd = DeclareLaunchArgument(
-
'default_bt_xml_filename',
-
default_value=os.path.join(
-
get_package_share_directory('nav2_bt_navigator'),
-
'behavior_trees', 'navigate_w_replanning_and_recovery.xml'),
-
description='Full path to the behavior tree xml file to use')
-
-
declare_autostart_cmd = DeclareLaunchArgument(
-
'autostart', default_value='true',
-
description='Automatically startup the nav2 stack')
-
-
declare_rviz_config_file_cmd = DeclareLaunchArgument(
-
'rviz_config_file',
-
default_value=os.path.join(bringup_dir, 'rviz', 'nav2_default_view.rviz'),
-
description='Full path to the RVIZ config file to use')
-
-
declare_use_simulator_cmd = DeclareLaunchArgument(
-
'use_simulator',
-
default_value='True',
-
description='Whether to start the simulator')
-
-
declare_use_robot_state_pub_cmd = DeclareLaunchArgument(
-
'use_robot_state_pub',
-
default_value='True',
-
description='Whether to start the robot state publisher')
-
-
declare_use_rviz_cmd = DeclareLaunchArgument(
-
'use_rviz',
-
default_value='True',
-
description='Whether to start RVIZ')
-
-
declare_simulator_cmd = DeclareLaunchArgument(
-
'headless',
-
default_value='False',
-
description='Whether to execute gzclient)')
-
-
declare_world_cmd = DeclareLaunchArgument(
-
'world',
-
# TODO(orduno) Switch back once ROS argument passing has been fixed upstream
-
# https://github.com/ROBOTIS-GIT/turtlebot3_simulations/issues/91
-
# default_value=os.path.join(get_package_share_directory('turtlebot3_gazebo'),
-
# 'worlds/turtlebot3_worlds/waffle.model'),
-
default_value=os.path.join(bringup_dir, 'worlds', 'waffle.model'),
-
description='Full path to world model file to load')
-
-
# Specify the actions
-
start_gazebo_server_cmd = ExecuteProcess(
-
condition=IfCondition(use_simulator),
-
cmd=['gzserver', '-s', 'libgazebo_ros_init.so', world],
-
cwd=[launch_dir], output='screen')
-
-
start_gazebo_client_cmd = ExecuteProcess(
-
condition=IfCondition(PythonExpression([use_simulator, ' and not ', headless])),
-
cmd=['gzclient'],
-
cwd=[launch_dir], output='screen')
-
-
urdf = os.path.join(bringup_dir, 'urdf', 'turtlebot3_waffle.urdf')
-
-
start_robot_state_publisher_cmd = Node(
-
condition=IfCondition(use_robot_state_pub),
-
package='robot_state_publisher',
-
executable='robot_state_publisher',
-
name='robot_state_publisher',
-
namespace=namespace,
-
output='screen',
-
parameters=[{'use_sim_time': use_sim_time}],
-
remappings=remappings,
-
arguments=[urdf])
-
-
rviz_cmd = IncludeLaunchDescription(
-
PythonLaunchDescriptionSource(os.path.join(launch_dir, 'rviz_launch.py')),
-
condition=IfCondition(use_rviz),
-
launch_arguments={'namespace': '',
-
'use_namespace': 'False',
-
'rviz_config': rviz_config_file}.items())
-
-
bringup_cmd = IncludeLaunchDescription(
-
PythonLaunchDescriptionSource(os.path.join(launch_dir, 'bringup_launch.py')),
-
launch_arguments={'namespace': namespace,
-
'use_namespace': use_namespace,
-
'slam': slam,
-
'map': map_yaml_file,
-
'use_sim_time': use_sim_time,
-
'params_file': params_file,
-
'default_bt_xml_filename': default_bt_xml_filename,
-
'autostart': autostart}.items())
-
-
# Create the launch description and populate
-
ld = LaunchDescription()
-
-
# Declare the launch options
-
ld.add_action(declare_namespace_cmd)
-
ld.add_action(declare_use_namespace_cmd)
-
ld.add_action(declare_slam_cmd)
-
ld.add_action(declare_map_yaml_cmd)
-
ld.add_action(declare_use_sim_time_cmd)
-
ld.add_action(declare_params_file_cmd)
-
ld.add_action(declare_bt_xml_cmd)
-
ld.add_action(declare_autostart_cmd)
-
-
ld.add_action(declare_rviz_config_file_cmd)
-
ld.add_action(declare_use_simulator_cmd)
-
ld.add_action(declare_use_robot_state_pub_cmd)
-
ld.add_action(declare_use_rviz_cmd)
-
ld.add_action(declare_simulator_cmd)
-
ld.add_action(declare_world_cmd)
-
-
# Add any conditioned actions
-
ld.add_action(start_gazebo_server_cmd)
-
ld.add_action(start_gazebo_client_cmd)
-
-
# Add the actions to launch all of the navigation nodes
-
ld.add_action(start_robot_state_publisher_cmd)
-
ld.add_action(rviz_cmd)
-
ld.add_action(bringup_cmd)
-
-
return ld
如果需要一边导航和建图同步开展,设置参数slam:=True;
ros2 launch nav2_bringup tb3_simulation_launch.py slam:=True
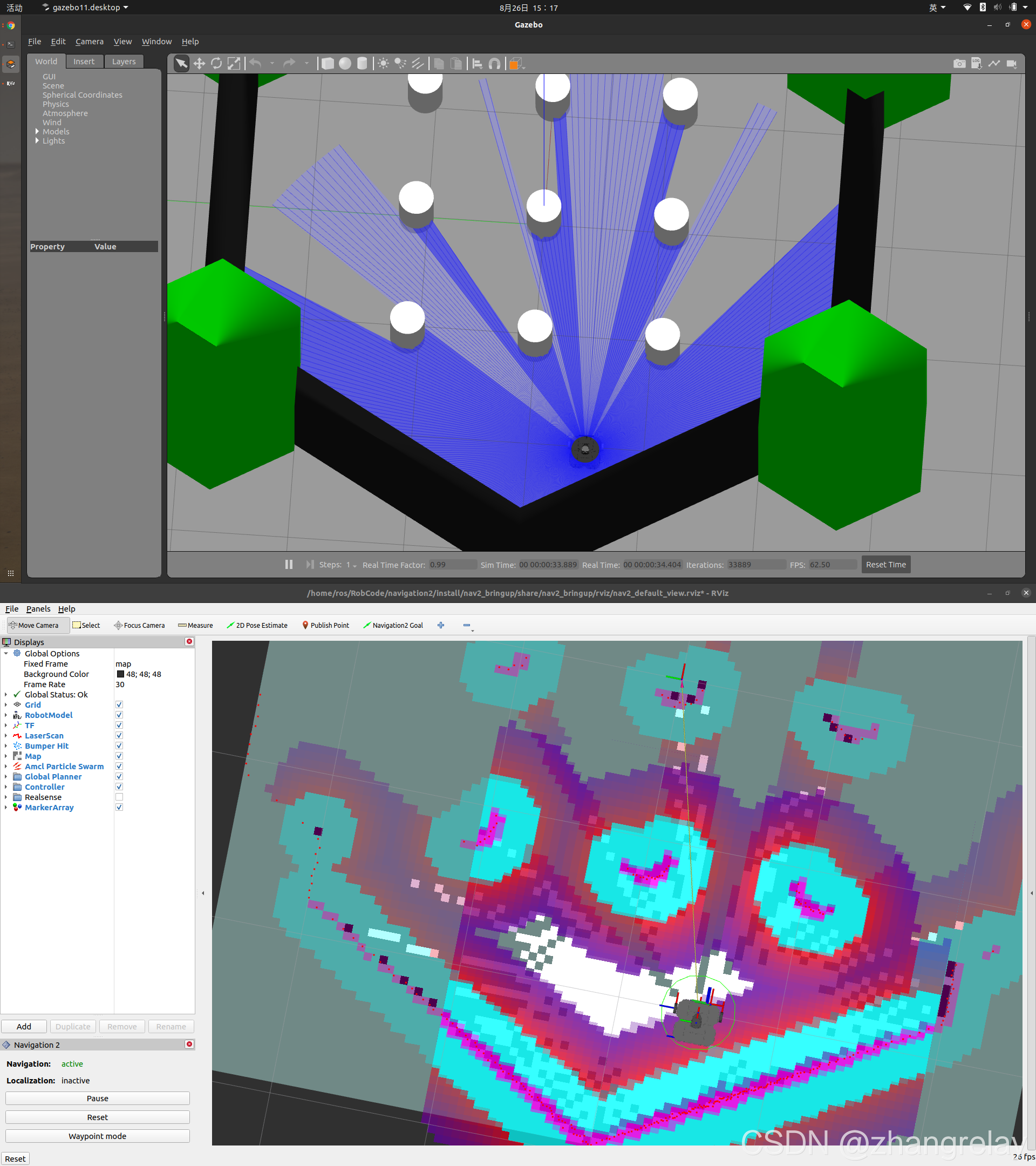
这时不用给初始位置,直接导航即可,机器人会同步绘制地图。
换一个环境(可以任意换,这里以house为例):
修改(tb3_sim_house.py):
-
declare_world_cmd = DeclareLaunchArgument(
-
'world',
-
# TODO(orduno) Switch back once ROS argument passing has been fixed upstream
-
# https://github.com/ROBOTIS-GIT/turtlebot3_simulations/issues/91
-
# default_value=os.path.join(get_package_share_directory('turtlebot3_gazebo'),
-
# 'worlds/turtlebot3_worlds/waffle.model'),
-
default_value=os.path.join(bringup_dir, 'worlds', 'waffle_house.model'),
-
description='Full path to world model file to load')
waffle_house.model
-
<model name="turtlebot3_house">
-
<static>1</static>
-
<include>
-
<uri>model://turtlebot3_house</uri>
-
</include>
-
</model>
编译后,使用如下命令:
- ros2 launch nav2_bringup tb3_sim_house.py slam:=True
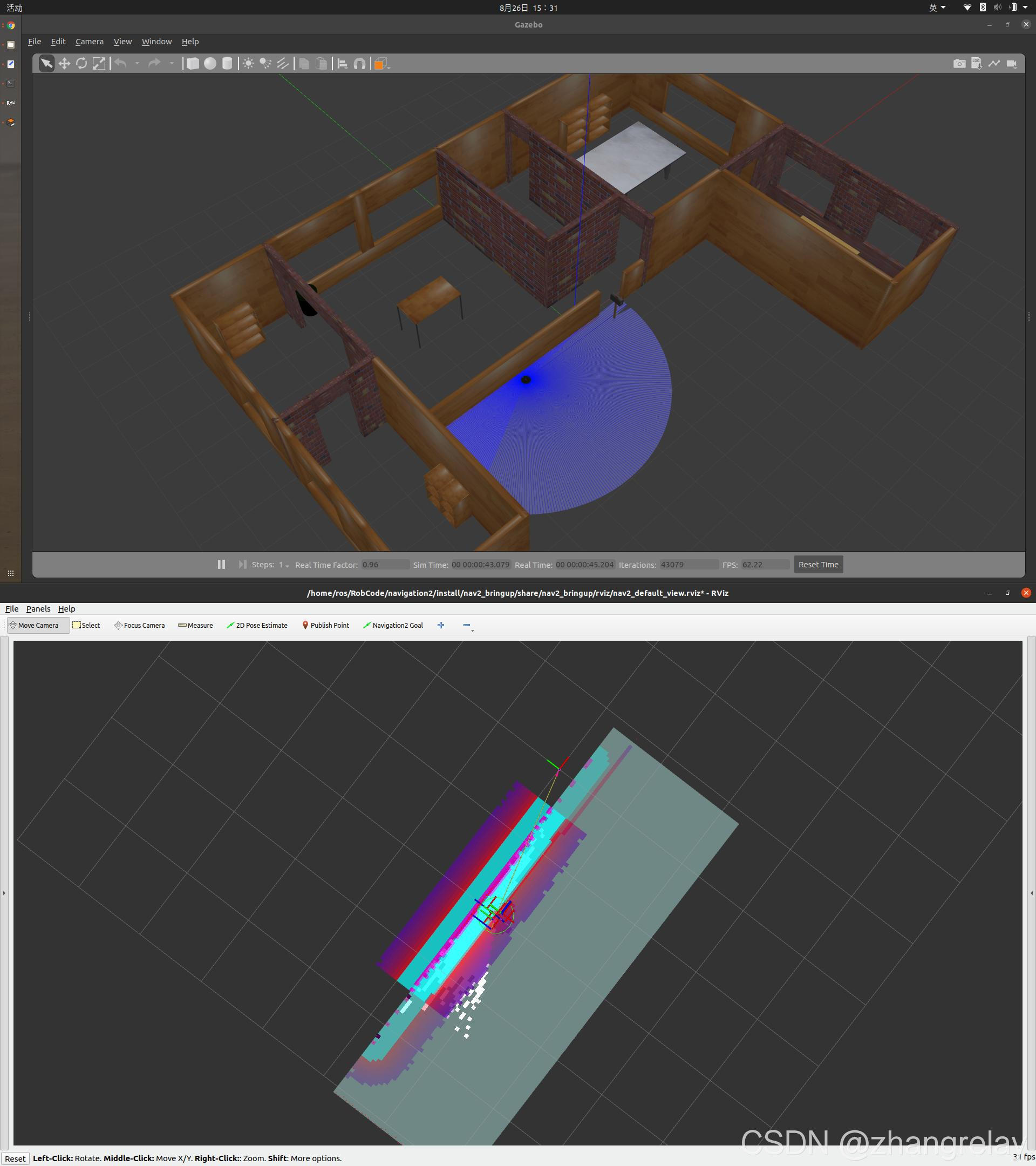
注意,house入口处的障碍物-信箱📫,来导航算法不给力,扛起来!!!


不玩了,正常建图和导航效果如下:
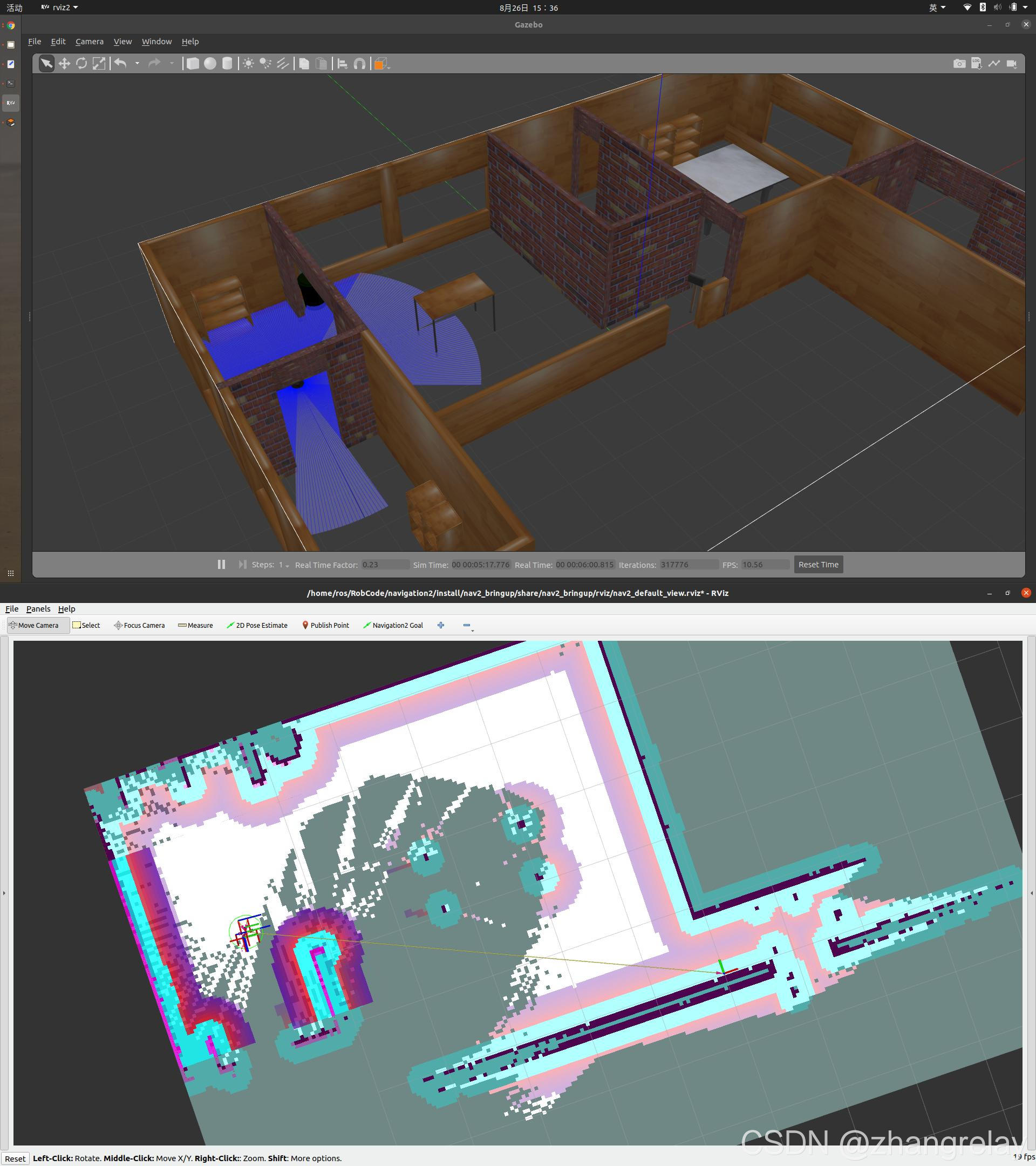

比自己遥控省时省力。
重要的功能包:
- turtlebot3
- navigation2
- slam_toolbox
更多功能自己摸索一下。
roslaunch2示例
节点加载
-
from launch import LaunchDescription
-
from launch_ros.actions import Node
-
-
def generate_launch_description():
-
return LaunchDescription([
-
Node(
-
name='node_runtime_name',
-
package='ros2_package_name',
-
executable='name_of_executable',
-
parameters=[{'name_of_int_param': 1,
-
'name_of_str_param': 'value'}],
-
remappings=[('from', 'to')],
-
output='screen',
-
),
-
# More Nodes!
-
])
加载参数yaml
-
node_name:
-
ros__parameters:
-
some_int_param: 1
-
some_str_param: "the_value"
更具体一点:
-
from ament_index_python.packages import get_package_share_directory
-
-
# Assuming you have a file called package_name/config/params.yaml
-
node_params = os.path.join(
-
get_package_share_directory('package_name'),
-
'config',
-
'params.yaml'
-
)
-
-
# Add this to your LaunchDescription
-
Node(
-
name='node_runtime_name',
-
package='ros2_package_name',
-
executable='name_of_executable',
-
parameters=[{'another_param': 42.0},
-
node_params]
-
)
包含其他launch文件
-
import os
-
from ament_index_python.packages import get_package_share_directory
-
from launch.actions import IncludeLaunchDescription
-
from launch.launch_description_sources import PythonLaunchDescriptionSource
-
-
# Assuming you have a file called package_name/launch/my_launch.launch.py
-
my_launch_file = os.path.join(
-
get_package_share_directory('package_name'),
-
'launch',
-
'my_launch.launch.py'
-
)
-
-
# Add this to your LaunchDescription
-
IncludeLaunchDescription(
-
PythonLaunchDescriptionSource([my_launch_file])
-
),
加载URDF文件:
-
import os
-
from ament_index_python.packages import get_package_share_directory
-
from launch_ros.actions import Node
-
-
# Load the URDF into a parameter
-
desc_dir = get_package_share_directory('robot_description_pkg')
-
urdf_path = os.path.join(desc_dir, 'robots', 'my_urdf.urdf')
-
urdf = open(urdf_path).read()
-
-
# Add this to your LaunchDescription
-
Node(
-
name='robot_state_publisher',
-
package='robot_state_publisher',
-
executable='robot_state_publisher',
-
parameters=[{'robot_description': urdf}],
-
)
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/119931907

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)