ROS2极简总结-导航简介-自定位ROS机器人TF基础(坐标相关概念和实践)

本节主要介绍导航所涉及的基础概念和一些相关内容。
参考:Navigation using ROS 2 - Introduction
机器人在环境中运动方向的路径规划要回答三个问题:
- 我在哪?(Localization)
- 我要去哪里?(Goal)
- 我怎么走?(PathPlan)
如果要细分问题更多,就以此为基础吧。看如下:

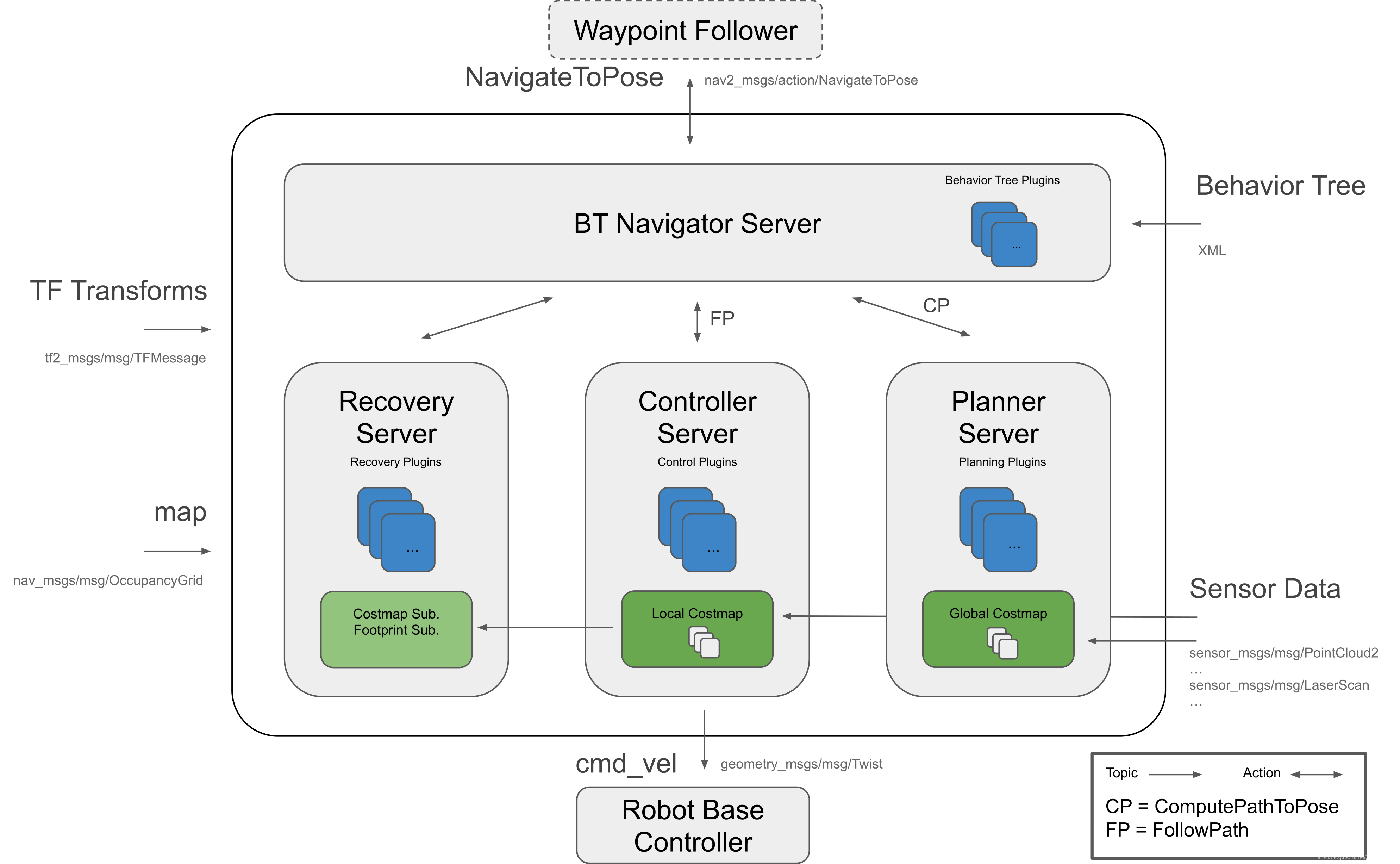
ROS2的navigation2功能包,支持Linux、Windows和MacOS,并且适用于各类仿真环境如Gazebo、Webots等,同时支持多款真实机器人,最常用的是TurtleBot2和TurtleBot3。
如何让机器人不再迷茫!!!
定位
对于机器人导航而言, 在地图上定位机器人 (AMCL):
- 无地图定位
- 有地图定位
注意其差异性,通常为局部和全局,给定相对和绝对坐标。
无地图定位通常用于避障等任务,有地图定位通常为目标巡逻或区域覆盖。
ROS2导航的主要内容:
- 定位
- 建图
- 路径规划
定位常用方法:
- 机器人如何感知自身移动
- 使用自身传感器(轮编码器,IMU)=> 相对机器人位移
- 观测外部环境感知自身移动
- 使用外部感受器(激光雷达、摄像头、GPS)=> 绝对机器人姿态估计
从“我在哪里” -->“我到底在哪里?”
估计值与真实值的差异!!!
- 传感器并不完美!(局部估计累积误差)
- 自身感知传感器产生漂移 => 需要不同的来源和绝对值来补偿漂移
- 感知环境需要时间!(绝对估计周期长)
- 比较外部感受传感器数据形成地图很慢 => 需要自身传感器

上图可以更清晰描述这些概念。
讲到定位自然离不开坐标变换(TF)
对于导航而言,通常关注以下要点:
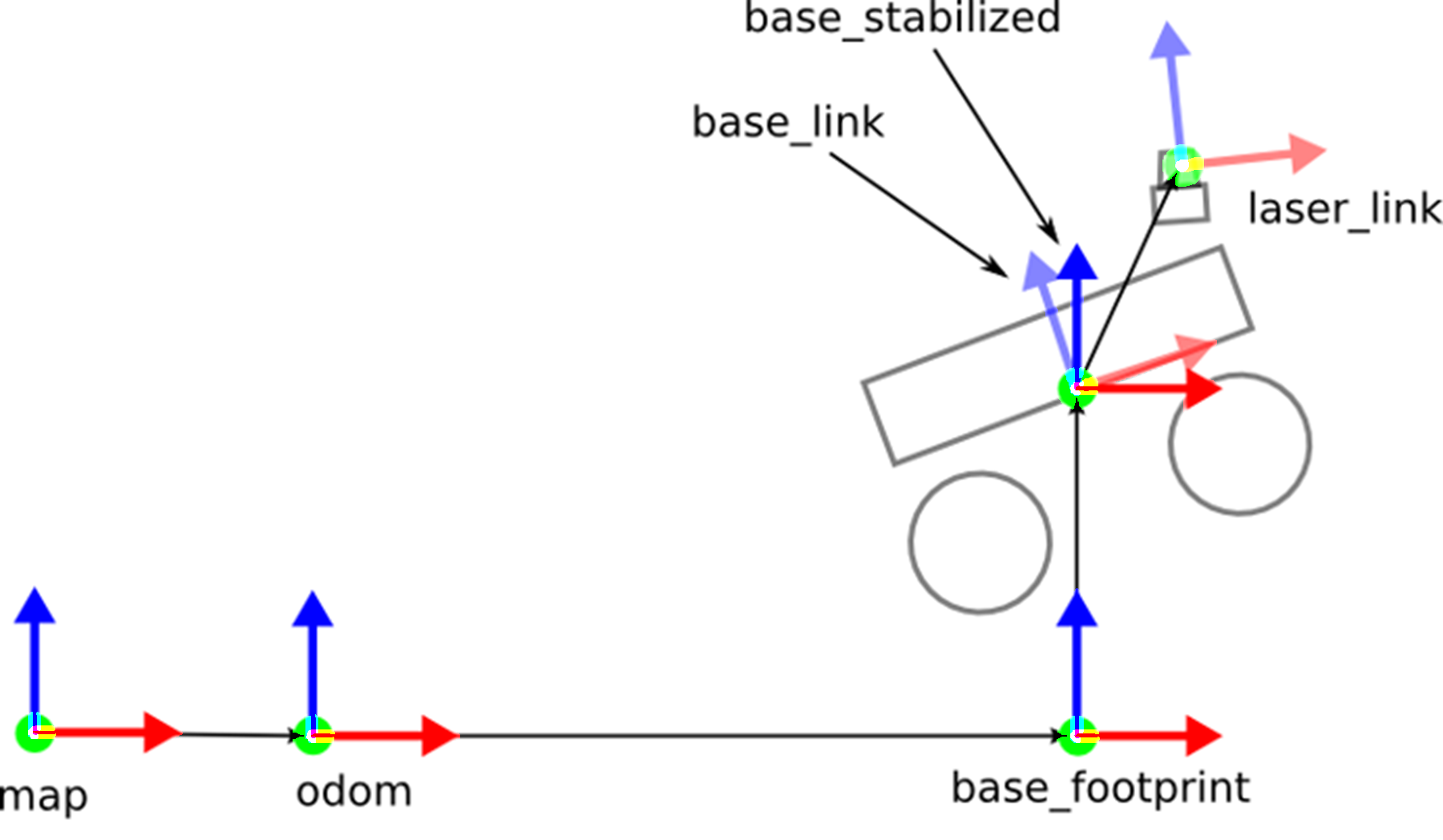
TF名称(对应下图):
- “map” - 地图环境原点(固定坐标系)
- "odom" - 里程计的父级
- "base_footprint" - 地图中机器人中心的投影(无高度)
- “base_stabilized” - 添加关于机器人高度相对于地图 /odom 层的信息。
- “base_link” - 机器人的中心
定位两个重要部分(以高速率可靠地完成TF坐标树需要传感器融合):
| 相对位置估计:本体如何移动
|
绝对位置估计:观测外部环境
|
|
参考更新速率100hz |
参考更新速率10hz |
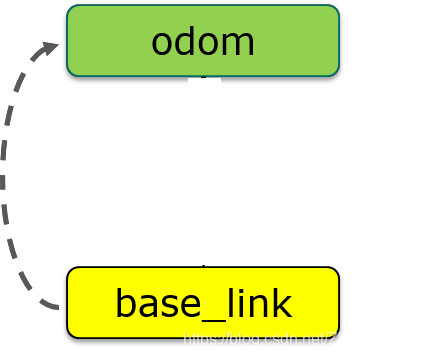
基础坐标变换树

如果不用base_link,也可以是base_footprint。 取决于机器人和开发人员具体设定。
传感器融合
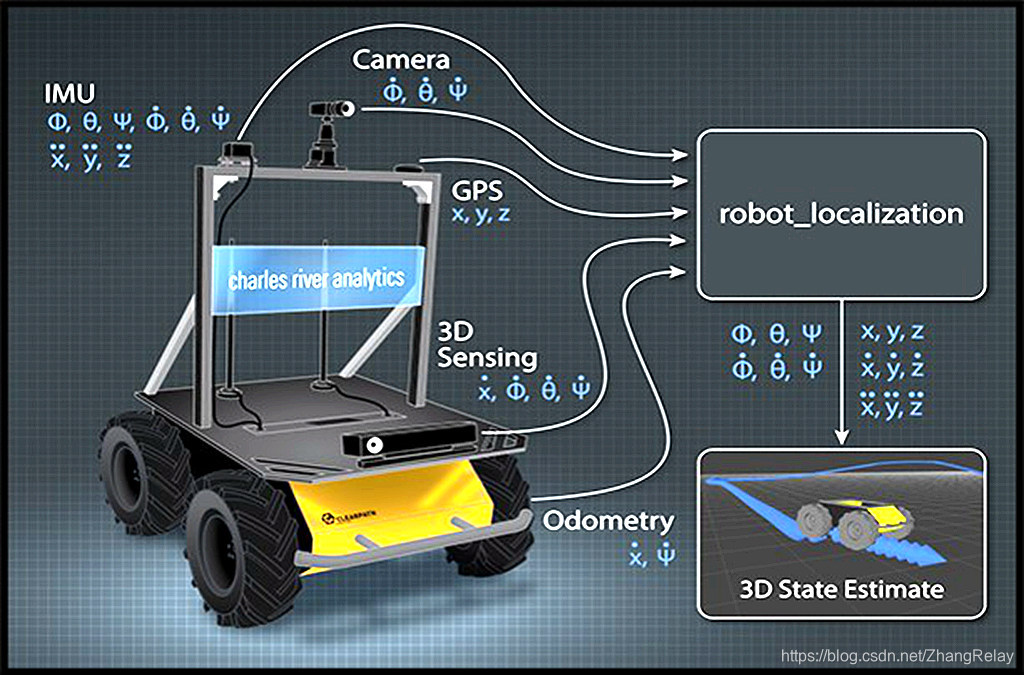
例如:robot_localization 功能包
- 这是一个支持研究论文中的实验的功能包。
- 通过使用卡尔曼滤波器的传感器融合提供 三维定位。
- 可以组合大量和多种类型的传感器。
- 实验显示了几种不同组合对定位精度的影响。
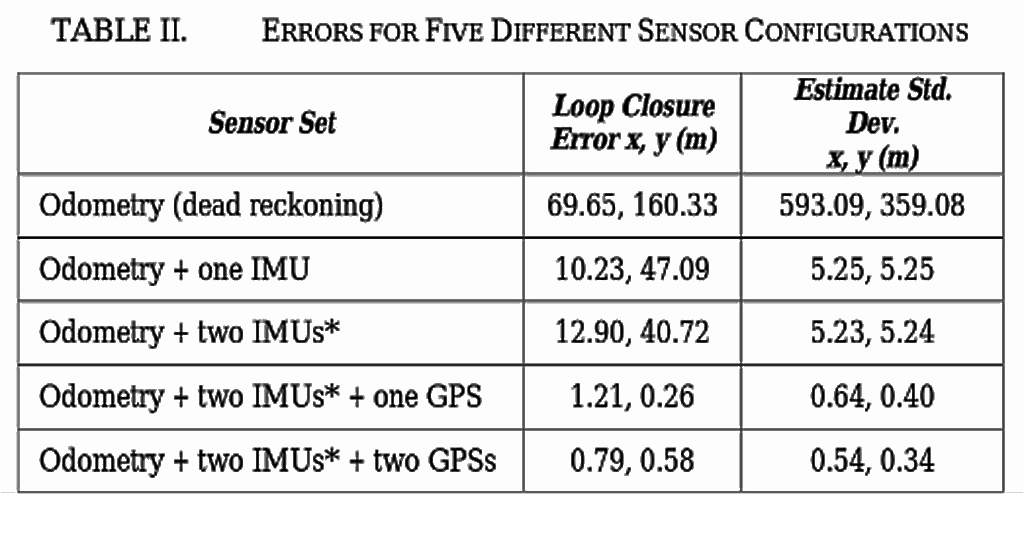
具体参考研究论文,多传感器融合,可以显著降低误差。
ROS2定位 - AMCL
Navigation 2中定位的实现,类似ROS1 AMCL的接口
自适应蒙特卡罗定位:
- - 概率 2D 定位 (X,Y,Θ)
- - 粒子滤波(粒子是猜测位置姿态的向量)
- - 对已知地图进行位置姿态跟踪
- - 纠正里程计漂移
AMCL:
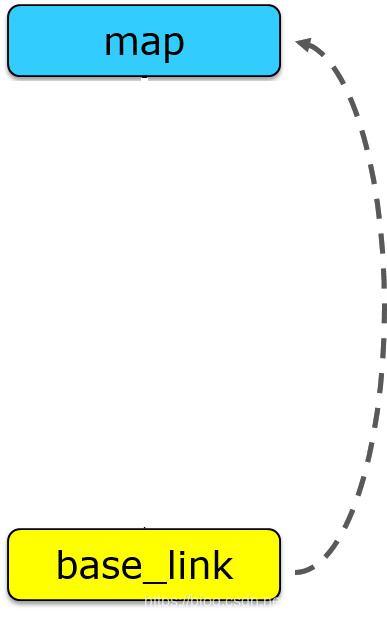
- 估计从 map 到 base_link 的转换
- 读取scan、TF、map 和初始姿势
- 发布从 map 到 odom 的转换

定位-小结
- 不要以赖单一传感器(需多传感器融合!!!)
- 一定要注意坐标变换树(TF tree设置不合适会断开)
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/119670718

- 点赞
- 收藏
- 关注作者
评论(0)