F-PointNet 使用RGB图像和Depth点云深度 数据的3D目标检测

前言
F-PointNet 的出现提出了直接处理点云数据的方案,但这种方式应用到 3D 检测领域还面临着一些挑战,比如:如何有效地在三维空间中定位目标的可能位置,即如何产生 3D 候选框,假如全局搜索将会耗费大量算力与时间。
它是在进行点云处理之前,先使用图像信息得到一些先验搜索范围,这样既能提高效率,又能增加准确率。
论文地址:Frustum PointNets for 3D Object Detection from RGB-D Data
开源代码:https://github.com/charlesq34/frustum-pointnets
一、基本思路
首先使用在 RGB 图像上运行的 2D 检测器,其中每个2D边界框定义一个3D锥体区域。然后基于这些视锥区域中的 3D 点云,我们使用 PointNet/PointNet++ 网络实现了 3D实例分割和非模态 3D 边界框估计。
- 基于图像2D目标检测。
- 基于图像生成锥体区域。
- 在锥体内,使用 PointNet/PointNet++ 网络进行点云实例分割。
它是在进行点云处理之前,先使用图像信息得到一些先验搜索范围,这样既能提高效率,又能增加准确率。先看看下面这张图:
在这张图里,左上角的意思是先把图像和点云信息标定好(这个属于传感器的外参标定,在感知之前进行;获取两个传感器之间旋转矩阵和平移向量,就可以得到相互的位置关系)。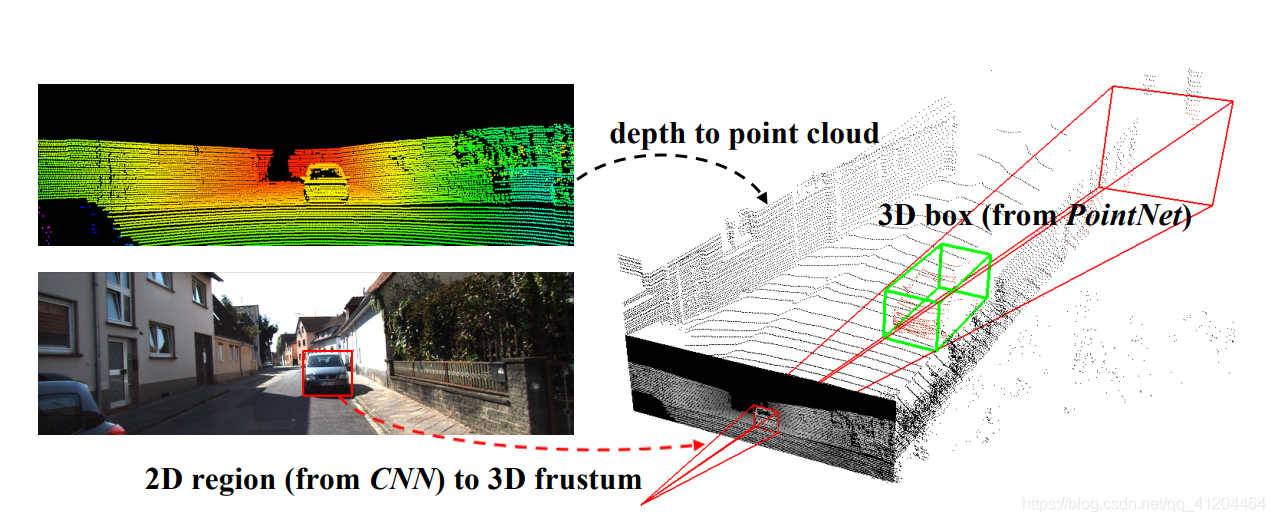
左下角是用CV里的目标检测算法检测出物体的边界框(BoundingBox),有了边界框之后,以相机为原点,沿边界框方向延伸过去就会形成一个锥体(上图的右半部分),该论文题目里frustum这个词就是锥体的意思,我们用点云对该物体进行识别的时候只需要在这个锥体内识别就行了,大大减小了搜索范围。
二、模型框架
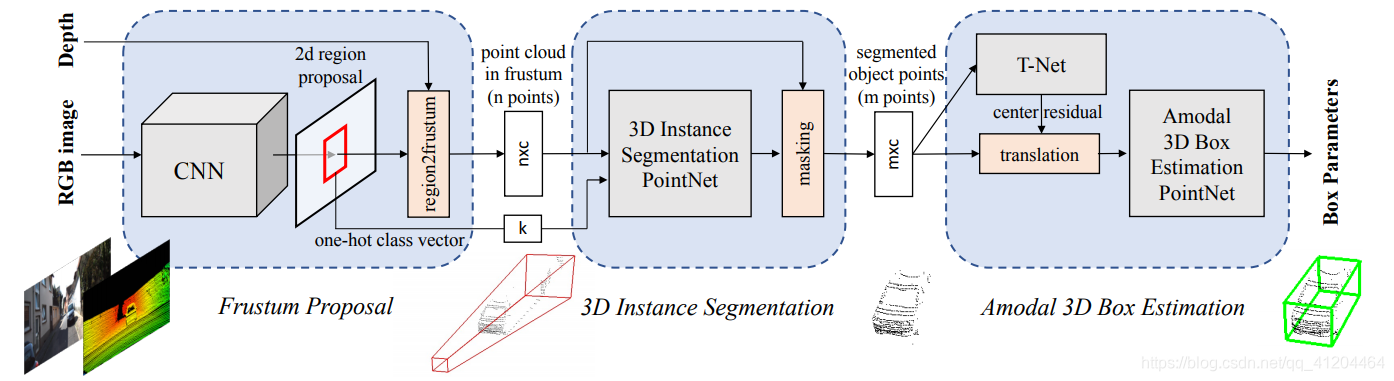
模型结构如下:(可以点击图片放大查看)
![]()
网络共分为三部分,第一部分是使用图像进行目标检测并生成锥体,第二部分是在锥体内的点云实例分割,第三部分是点云物体边界框的回归。
三、基于图像生成锥体区域
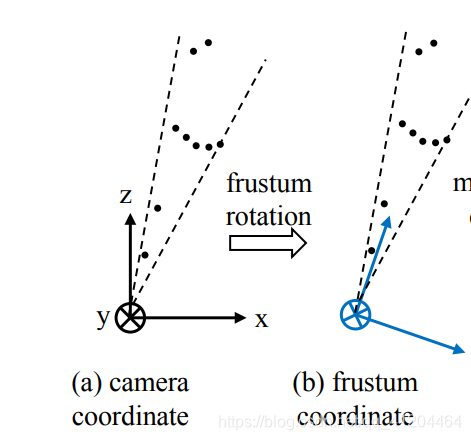
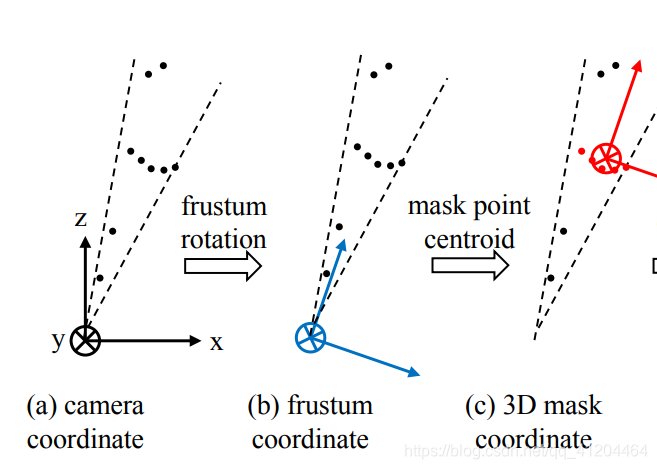
由于检测到的目标不一定在图像的正中心,所以生成的锥体的轴心就不一定和相机的坐标轴重合,如下图中(a)所示。为了使网络具有更好的旋转不变性,我们需要做一次旋转,使相机的Z轴和锥体的轴心重合。如下图中(b)所示。
![]()
四、 在锥体内进行点云实例分割
实例分割使用PointNet。一个锥体内只提取一个物体,因为这个锥体是图像中的边界框产生的,一个边界框内也只有一个完整物体。
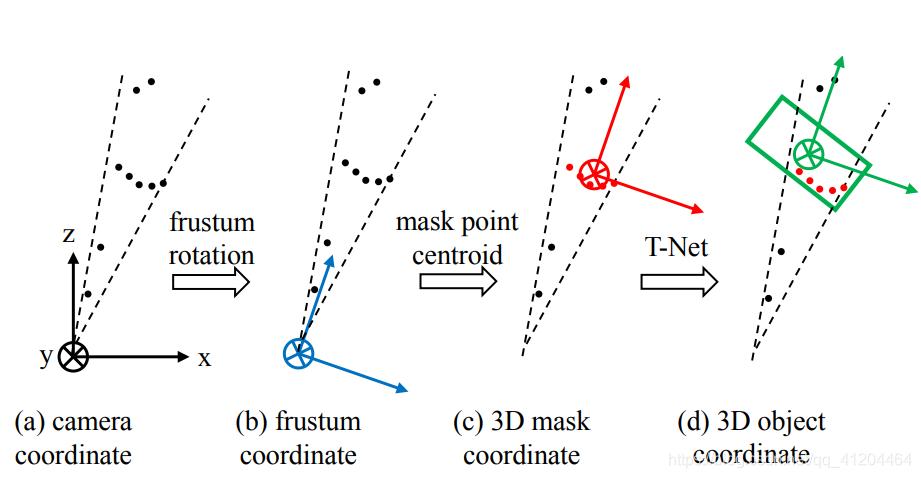
在生成锥体的时候提到了旋转不变性,此处完成分割这一步之后,还需要考虑平移不变性,因为点云分割之后,分割的物体的原点和相机的原点必不重合,而我们处理的对象是点云,所以应该把原点平移到物体中去,如下图中(c)所示。
![]()
五、生成精确边界框
生成精确边界框的网络结构:
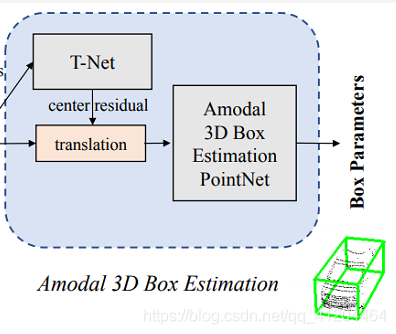
从这个结构里可以看出,在生成边界框之前,需要经过一个T-Net,这个东西的作用是生成一个平移量,之所以要做这一步,是因为在上一步得到的物体中心并不完全准确,所以为了更精确地估计边界框,在此处对物体的质心做进一步的调整,如下图中(d)所示。
![]()
下面就是边界框回归了,对一个边界框来讲,一共有七个参数,包括:
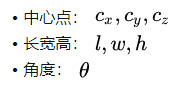
最后总的残差就是以上目标检测、T-Net和边界框残差之和,可以据此构建损失函数。

![]()
六、PointNet关键点
6.1 F-PointNet使用2D RGB图像
原因是
- 当时基于纯3D点云数据的3D目标检测对小目标检测效果不佳。所以F-PointNet先基于2D RGB做2D的目标检测来定位目标,再基于2d目标检测结果用其对应的点云数据视锥进行bbox回归的方法来实现3D目标检测。
- 使用纯3D的点云数据,计算量也会特别大,效率也是这个方法的优点之一。
使用成熟的2D CNN目标检测器(Mask RCNN)生成2D检测框,并输出one-hot 分类向量(即基于2D RGB图像的分类)。
6.2 锥体框生成
2D检测框结合深度信息,找到最近和最远的包含检测框的平面来定义3D视锥区域frustum proposal。然后在该frustum proposal里收集所有的3D点来组成视锥点云(frustum point cloud)。
七、实验结果
与其他模型对比:

![]()
模型效果:

![]()
八、优点
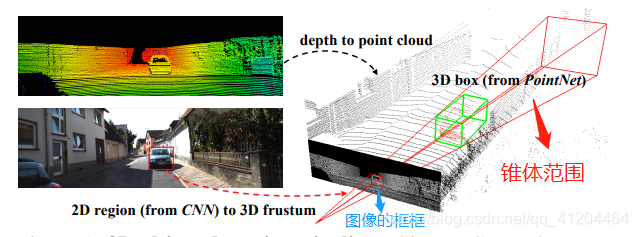
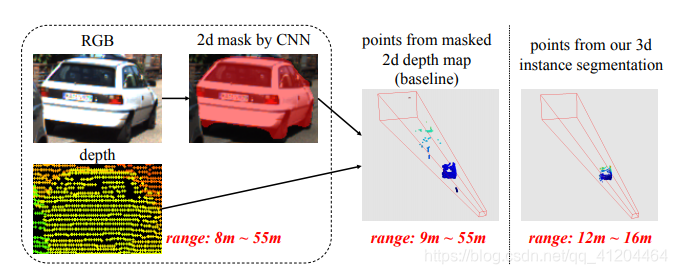
(1)舍弃了global fusion,提高了检测效率;并且通过2D detector和3D Instance Segmentation PointNet对3D proposal实现了逐维(2D-3D)的精准定位,大大缩短了对点云的搜索时间。下图是通过3d instance segmentation将搜索范围从9m~55m缩减到12m~16m。
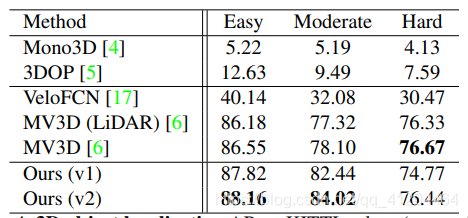
(2)相比于在BEV(Bird's Eye view)中进行3D detection,F-PointNet直接处理raw point cloud,没有任何维度的信息损失,使用PointNet能够学习更全面的空间几何信息,特别是在小物体的检测上有很好的表现。下图是来自Hao Su 2018年初的课程,现在的KITTI榜有细微的变动。
(3)利用成熟的2D detector对proposal进行分类(one-hot class vector,打标签),起到了一定的指导作用,能够大大降低PointNet对三维空间物体的学习难度。
九、模型代码
开源代码:https://github.com/charlesq34/frustum-pointnets
作者代码的运行环境:
系统:Ubuntu 14.04 或 Ubuntu 16.04
深度框架:TensorFlow1.2(GPU 版本)或 TensorFlow1.4(GPU 版本)
其他依赖库:cv2、mayavi等。
代码支持 Frustum PointNets 模型的训练和测试,以及基于预先计算的 2D 检测器输出(kitti/rgb_detections)评估 3D 目标检测结果。
参考:https://blog.csdn.net/congxing9333/article/details/109710411
https://zhuanlan.zhihu.com/p/87283846、https://www.codenong.com/cs105519981/

论文地址:Frustum PointNets for 3D Object Detection from RGB-D Data
开源代码:https://github.com/charlesq34/frustum-pointnets
本文只提供参考学习,谢谢。

- 点赞
- 收藏
- 关注作者
评论(0)