机器人操作系统ROS(indigo)与三维仿真软件V-Rep(3.2.1)通信接口使用笔记

通过网页快速了解Linux(Ubuntu)和ROS机器人操作系统,请参考实验楼在线系统如下:
初级教程可参考:https://www.shiyanlou.com/courses/854 邀请码:U23ERF8H
中级教程可参考:https://www.shiyanlou.com/courses/938 邀请码:U9SVZMKH
关键字:ROS(indigo),V-Rep(3.2.1), vrep_ros_bridge(lagadic).
vrep_ros_bridge提供了V-Rep和ROS之间的通信接口,可以实现使用ROS消息和服务控制V-Rep仿真的功能。
安装说明:注意:所以安装测试均在ubuntu 14.04 LTS下进行
1. 进入到通过终端进入到catkin_ws/src目录下
使用GIT下载:
git clone https://github.com/lagadic/vrep_ros_bridge.git
2. 检测版本号:
git checkout indigo-devel
3. 新打开一个终端:
gedit ~/.bashrc
4. 在末尾加上:
export VREP_ROOT_DIR=/ChangeWithyourPathToVrep/
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:/path_to_catkin_ws/catkin_ws/src
source /opt/ros/indigo/setup.bash
source /path_to_catkin_ws/catkin_ws/devel/setup.bash
其中:/ChangeWithyourPathToVrep/以及/path_to_catkin_ws/分别为代指,请根据实际安装目录调整。
5. 回到catkin_workspace并且运行:
catkin_make
catkin_make --pkg vrep_ros_bridge --cmake-args -DCMAKE_BUILD_TYPE=RelWithDebInfo
如果成功,可以在catkin_ws/devel/lib/下发现libv_repExtRosBridge.so, libcamera_handler.so, libmanipulator_handler.so, libquadrotor_handler.so, librigid_body_handler.so
6. 使用终端到V-Rep安装目录下,并输入:
ln -s /YOUR_CATKIN_WS_PATH/devel/lib/libv_repExtRosBridge.so
其中: /YOUR_CATKIN_WS_PATH为代指,请根据实际安装目录调整。
安装测试:
1. 在终端输入:
roscore
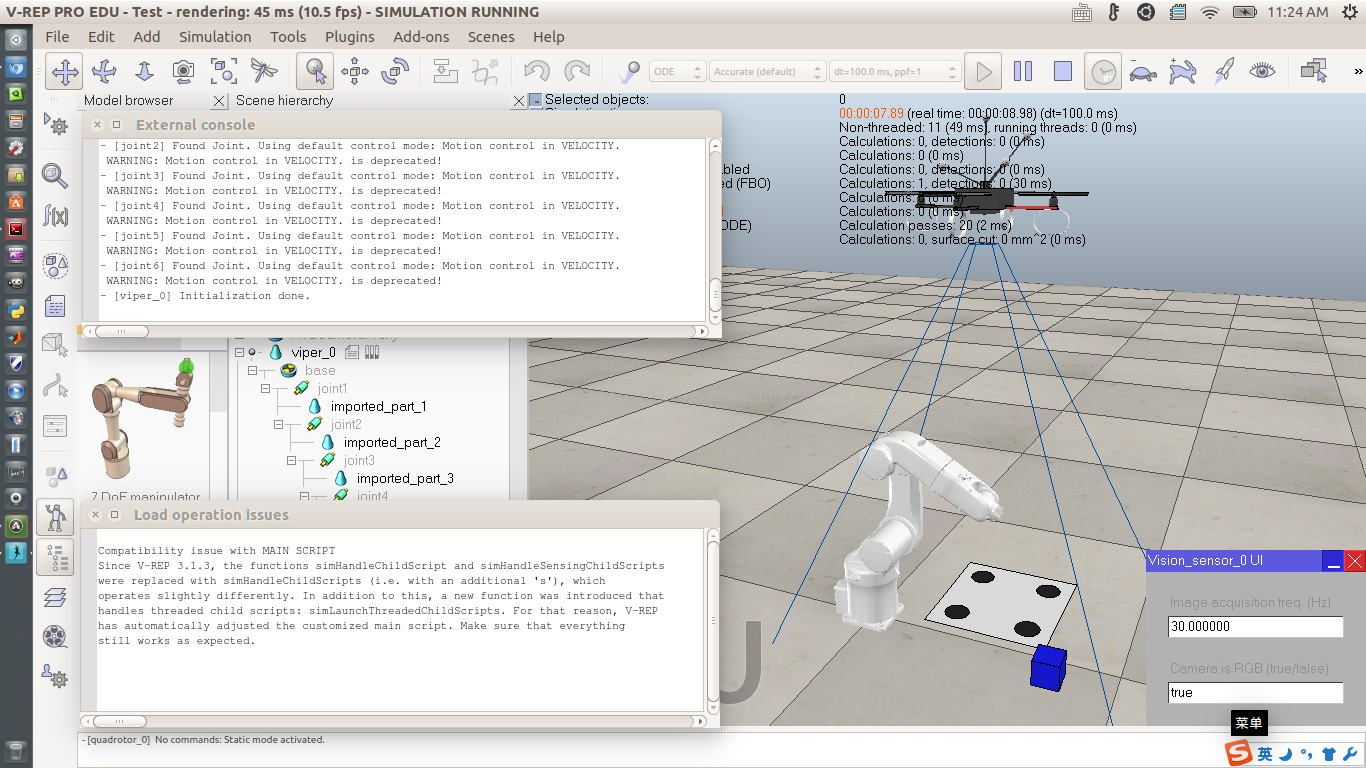
2. 在终端启动V-Rep:
./vrep.sh
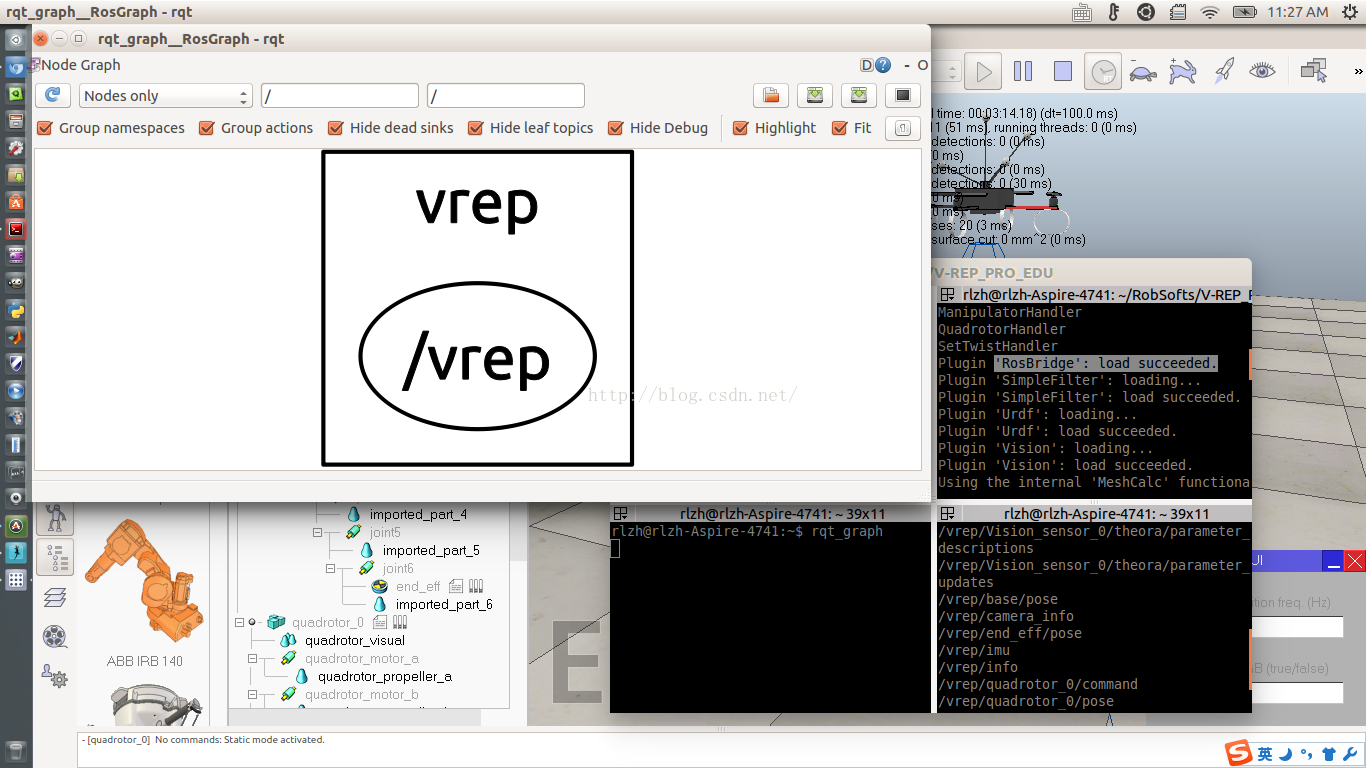
3. 测试ROS一些功能:
rqt_graph以及 rostopic list 等。
http://v.youku.com/v_show/id_XMTM2ODg5MDY5Ng
参考文献汇总:
1.ROS
http://wiki.ros.org/cn
2.V-Rep
http://www.coppeliarobotics.com/resources.html
3.vrep_ros_bridge
https://github.com/lagadic/vrep_ros_bridge
http://wiki.ros.org/vrep_ros_bridge
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/49401881

- 点赞
- 收藏
- 关注作者
评论(0)