起伏地形环境轮式机器人运动控制研究

【摘要】 首先,推荐一下国内研究起伏地形机器人大牛,
http://homepage.hit.edu.cn/pages/liangding
课题3:起伏地形环境机器人运动控制研究
研究对象:通常研究轮足式机器人地面适应能力等
研究内容:在地形起伏情况下,研究机器人运动控制问题,
包括打滑、驱动轮悬空等造成驱动力不足的问题。
研究目的:寻找自适应地形变化的运动控制策略 研...
首先,推荐一下国内研究起伏地形机器人大牛,
http://homepage.hit.edu.cn/pages/liangding
课题3:起伏地形环境机器人运动控制研究
研究对象:通常研究轮足式机器人地面适应能力等研究内容:在地形起伏情况下,研究机器人运动控制问题,
包括打滑、驱动轮悬空等造成驱动力不足的问题。
研究目的:寻找自适应地形变化的运动控制策略研究方法:路径优化,控制补偿等
研究思路草案待完善
机器人:
模型:
机器人动力学模型:
路径规划与速度之间的关系:传感器感知环境和自身信息:
路径规划策略:
例子:
起伏地形:
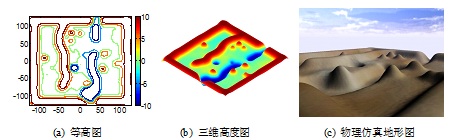
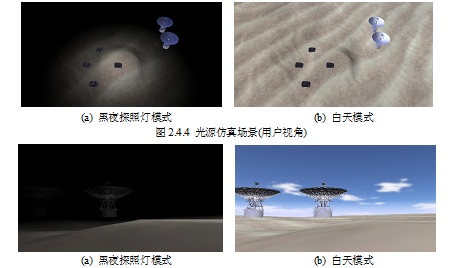
仿真环境描述:
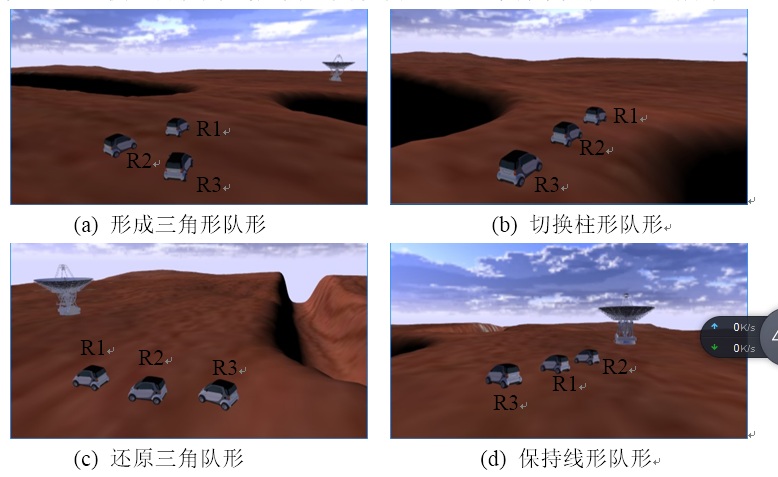
编队场景例子:
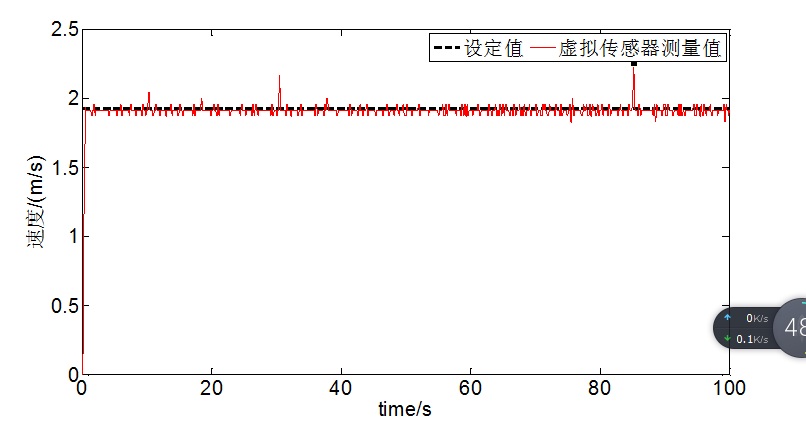
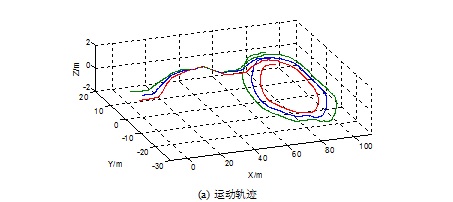
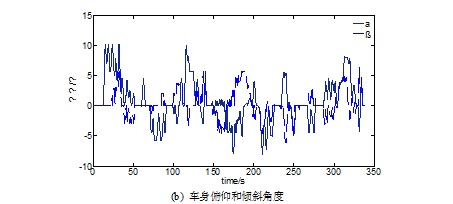
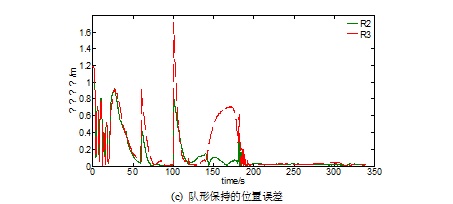
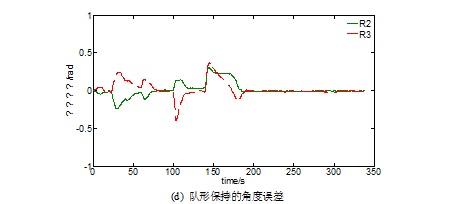
数据图表:
起伏地形的速度曲线:
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/50614473

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)