基于ROS_Arduino室内移动机器人SLAM实验测试

【摘要】 纯手工搭建的机器人,因此外观并不美。
基于ROS(indigo)以及Arduino等搭建软硬件平台,包括语音、视觉、激光、码盘等传感器设备。
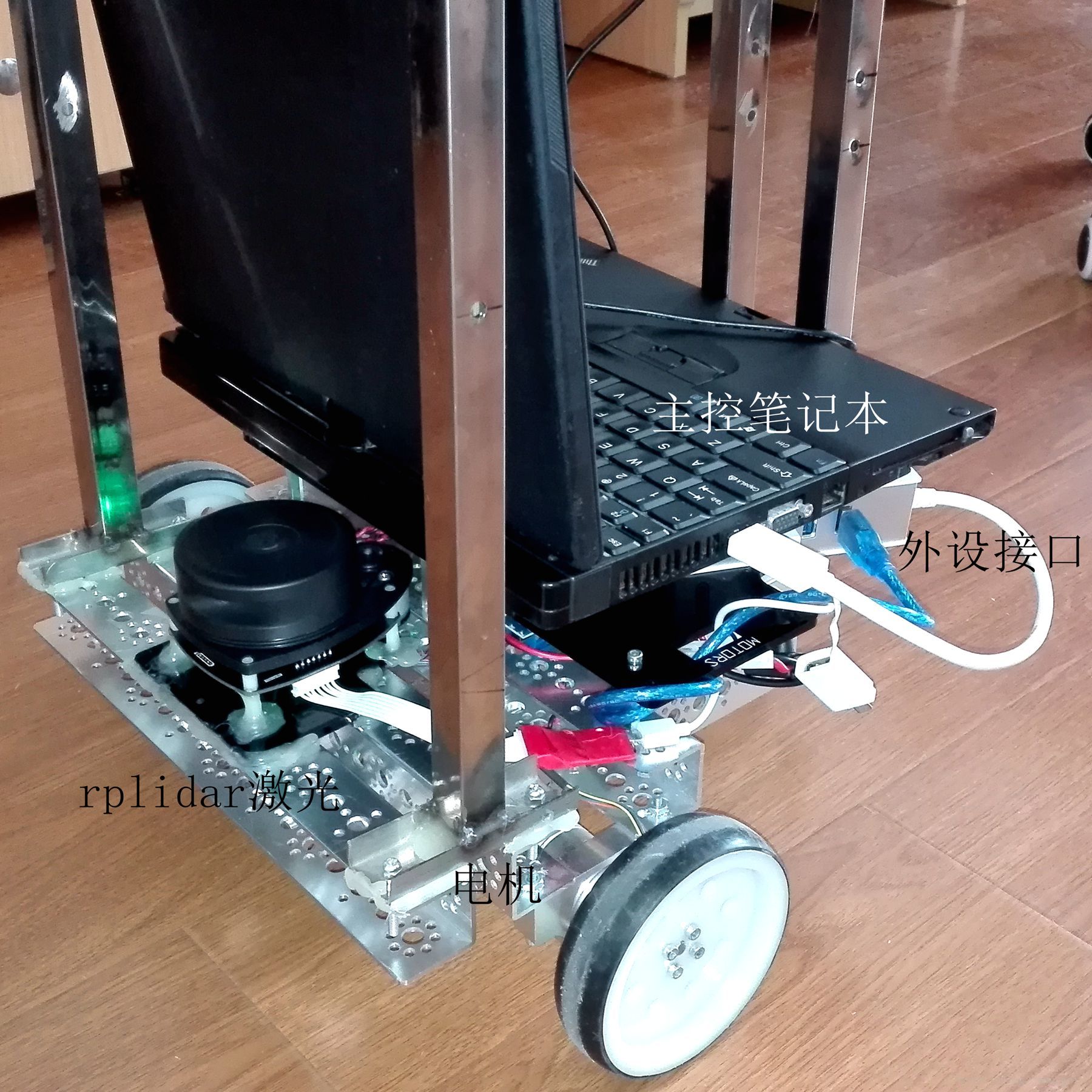
整体如下图所示:
底盘特写:
语音输入:
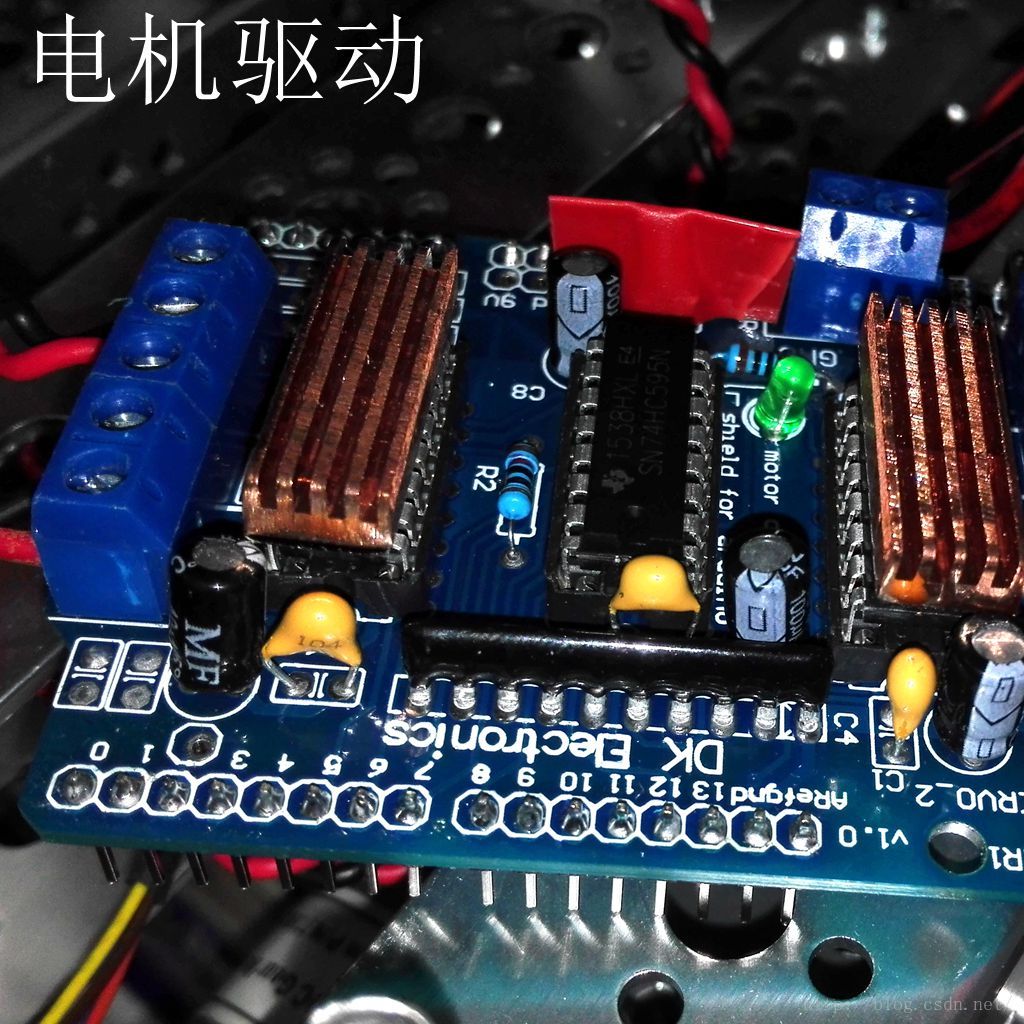
Arduino模块:
机器人主控:
各子功能测试,见之前博客内容。
子功能测试完成后,进行第一次功能组合测试,具体实验录像可...
纯手工搭建的机器人,因此外观并不美。
基于ROS(indigo)以及Arduino等搭建软硬件平台,包括语音、视觉、激光、码盘等传感器设备。
整体如下图所示:

底盘特写:

语音输入:

Arduino模块:

机器人主控:

各子功能测试,见之前博客内容。
子功能测试完成后,进行第一次功能组合测试,具体实验录像可见视频。
http://v.youku.com/v_show/id_XMTQxOTczMDY0MA
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/50372298

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)