Inverted pendulum-现代控制理论思考题-倒立摆小车控制算法研究(2019更新)

【摘要】 现代控制理论的MATLAB基础课件:
1. https://blog.csdn.net/zhangrelay/article/details/51615389
2. https://blog.csdn.net/ZhangRelay/article/details/88654172
新增加模块:OpenAI+Gazebo+ROS,实现人工智能自动调节...
现代控制理论的MATLAB基础课件:
1. https://blog.csdn.net/zhangrelay/article/details/51615389
2. https://blog.csdn.net/ZhangRelay/article/details/88654172
新增加模块:OpenAI+Gazebo+ROS,实现人工智能自动调节倒立摆参数。
观察下面示例(倒立摆小车,与常见的平衡代步车结构类似):
稳定?
如何保持摆的稳定性?如何实现?

稳定+轨迹?
1.问题简介:
倒立摆小车是典型的欠驱动(非完整)自然不稳定系统。
常用于验证控制算法的有效性。
通过小车前后移动,保持摆的平衡。
2.系统稳定分析和控制
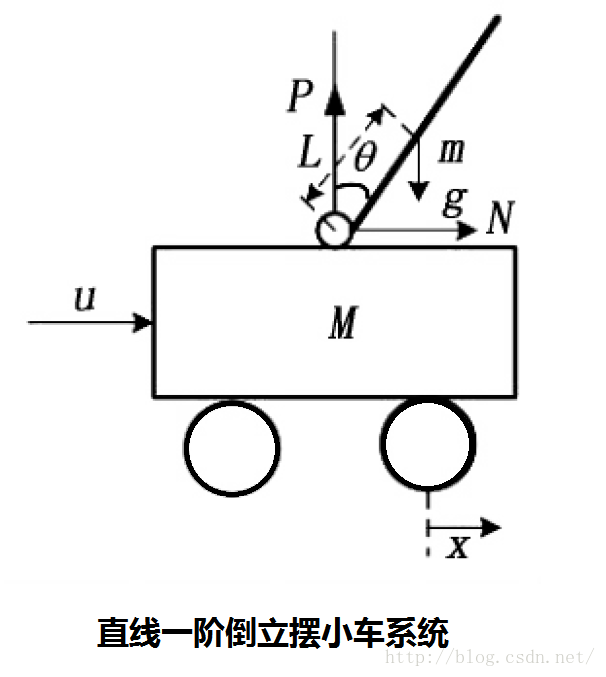
通过分析得到系统的状态空间模型。(开环不稳定系统)
如何设计控制器?能否实现全状态反馈?极点配置?
进一步思考如何证明设计出控制器的有效性?
仿真和实验验证等,画出控制曲线图,算法改进和优化。
3.系统运动控制
点镇定------路径规划------轨迹规划的区别?
4.仿真设计与算法测试
5.小结
以倒立摆小车系统为例,对现代控制理论课程进行教学。
包括分析系统稳定性,闭环反馈控制,还涉及如设计滤波器等。
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/51065684

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)