ROS(indigo)_turtlebot仿真示例包括stage和gazebo

ROS(indigo)_turtlebot仿真示例包括stage和gazebo
现上参考网址:
turtlebot:http://wiki.ros.org/Robots/TurtleBot
stage:http://wiki.ros.org/turtlebot_stage/Tutorials/indigo/Bring%20up%20TurtleBot%20in%20stage
gazebo:1. http://wiki.ros.org/turtlebot_gazebo/Tutorials/indigo/Gazebo%20Bringup%20Guide
2. http://wiki.ros.org/turtlebot_gazebo/Tutorials/indigo/Explore%20the%20Gazebo%20world
3. http://wiki.ros.org/turtlebot_gazebo/Tutorials/indigo/Make%20a%20map%20and%20navigate%20with%20it
1 stage
~$ roslaunch turtlebot_stage turtlebot_in_stage.launch
使用其他命令可以查看相关信息:









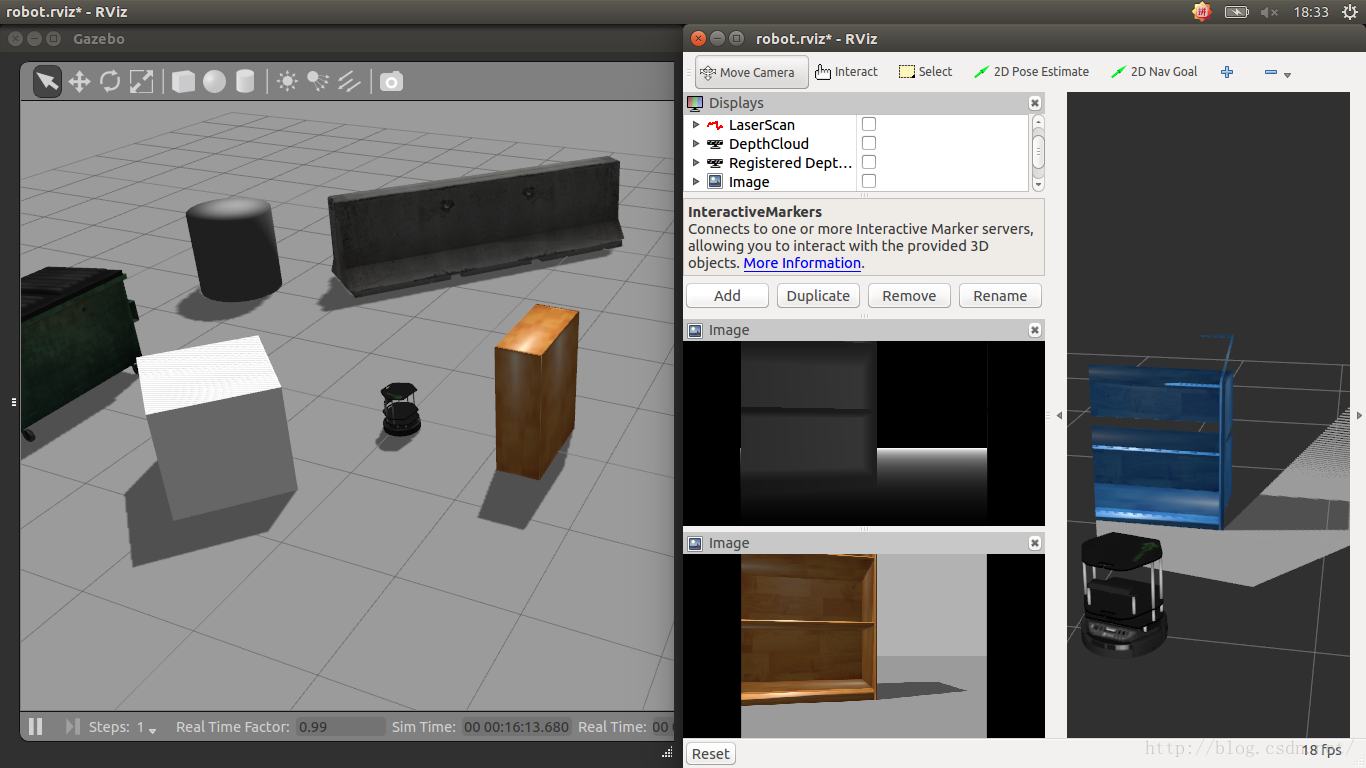
2 gazebo
~$ roslaunch turtlebot_gazebo turtlebot_world.launch


~$ roslaunch turtlebot_teleop keyboard_teleop.launch
~$ roslaunch turtlebot_rviz_launchers view_robot.launch


~$ roslaunch turtlebot_gazebo gmapping_demo.launch
~$ roslaunch turtlebot_rviz_launchers view_navigation.launch


~$ roslaunch turtlebot_gazebo turtlebot_world.launch world_file:=worlds/willowgarage.world



~$ rosrun map_server map_saver xxx


利用构建地图导航:
~$ roslaunch turtlebot_gazebo turtlebot_world.launch world_file:=worlds/willowgarage.world
~$ roslaunch turtlebot_gazebo amcl_demo.launch map_file:=/home/exbot/xxx.yaml
~$ roslaunch turtlebot_rviz_launchers view_navigation.launch


-End-
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/51418110

- 点赞
- 收藏
- 关注作者
评论(0)