ROS_Kinetic_07 ROS中机器人三维物理引擎高保真仿真利器gazebo 7.0

【摘要】 ROS_Kinetic_07 ROS中机器人三维物理引擎高保真仿真利器gazebo 7.0
ROS kinetic中的gazebo版本是7.0,有很多新的特性。
首先,启动gazebo:
~$ gazebo
可以看到类似下面的截图:
gazebo模型可以在网址:http://models.gazebosim.org/
模型已经更新到2016-05-09,稍后会提供下载。...
ROS_Kinetic_07 ROS中机器人三维物理引擎高保真仿真利器gazebo 7.0
ROS kinetic中的gazebo版本是7.0,有很多新的特性。
首先,启动gazebo:
~$ gazebo
可以看到类似下面的截图:

gazebo模型可以在网址:http://models.gazebosim.org/

模型已经更新到2016-05-09,稍后会提供下载。
可以使用wget下载到硬盘并保存在.gazebo/models文件下。

可以在菜单栏,熟悉下新版的特征和效果,查看相应的帮助文件。

最后,可以添加一些模型到环境中,并保存环境。
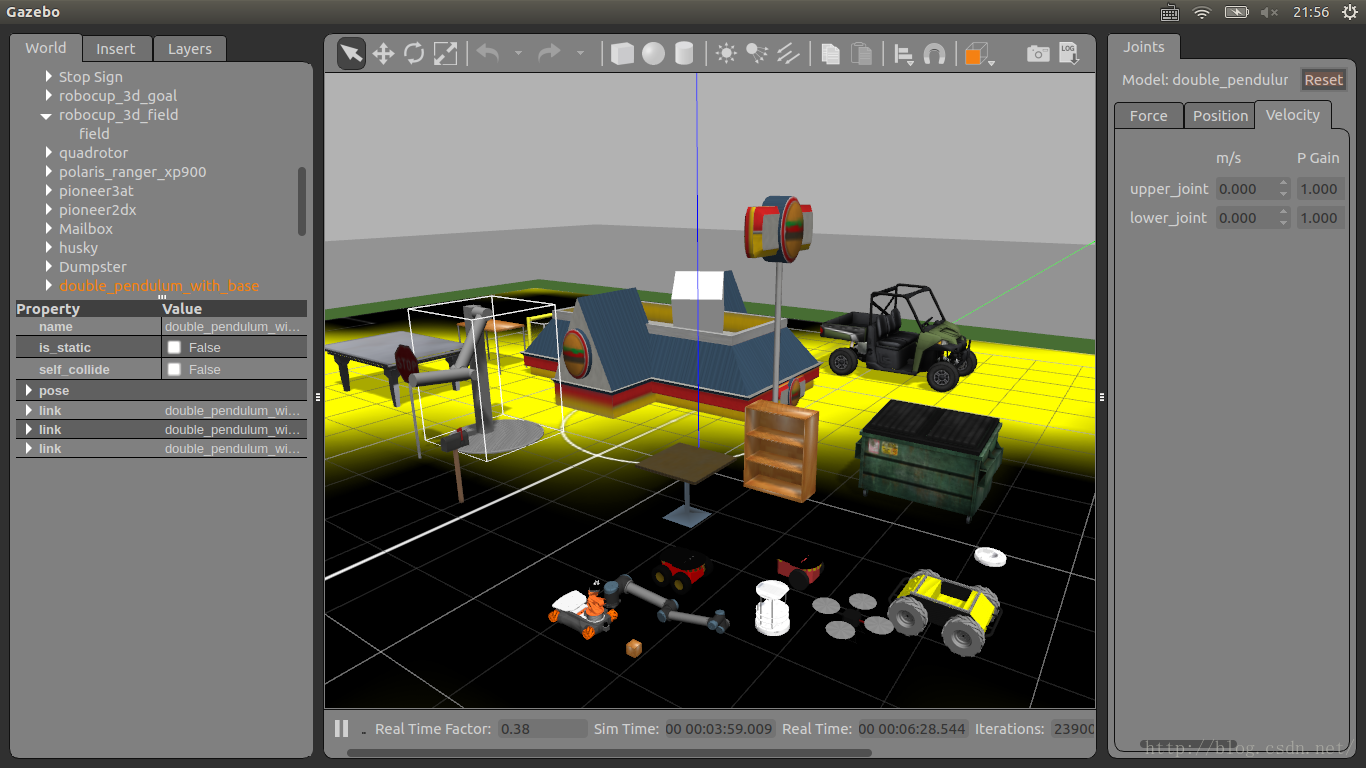
新版gazebo7.0模型要更多一些。启动速度也要比indigo中gazebo2快一点。
-End-
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/51419274

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)