ROS_Kinetic_14 ROS工具roswtf的基本使用方法等

ROS_Kinetic_14 ROS工具roswtf的基本使用方法
官网教程:http://wiki.ros.org/cn/ROS/Tutorials/Getting%20started%20with%20roswtf
安装检查
~$ roscore
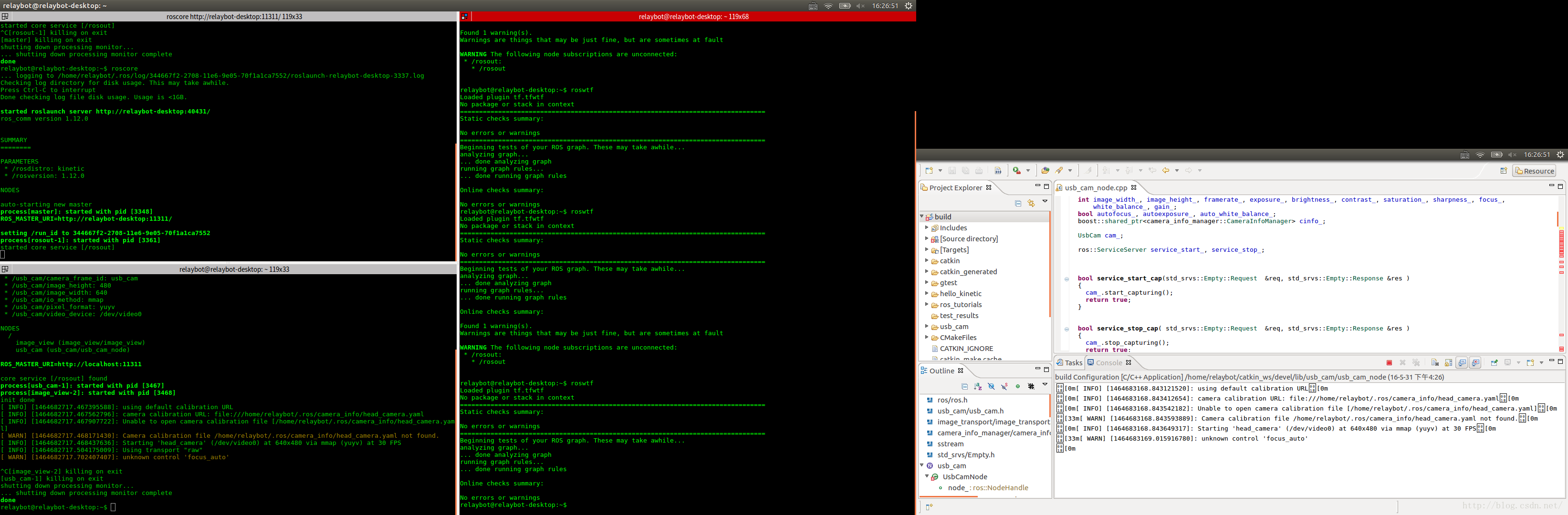
~$ roswtf
这时,会有警告。
WARNING The following node subscriptions are unconnected:
* /rosout:
* /rosout
运行时检查
在终端启动一个node,成功运行后,就没有警告等了。
~$ roswtf
Loaded plugin tf.tfwtf
No package or stack in context
================================================================================
Static checks summary:
No errors or warnings
================================================================================
Beginning tests of your ROS graph. These may take awhile...
analyzing graph...
... done analyzing graph
running graph rules...
... done running graph rules
Online checks summary:
No errors or warnings
还有错误报告等。
探索ROS维基
非常重要,介绍了ROS维基(wiki.ros.org)的组织结构以及使用方法。同时讲解了如何才能从ROS维基中找到你需要的信息。
http://wiki.ros.org/cn/ROS/Tutorials/NavigatingTheWiki
接下来做什么
这里将讨论获取更多知识的途径,以帮助你更好地使用ROS搭建真实或虚拟机器人。
http://wiki.ros.org/cn/ROS/Tutorials/WhereNext
rviz
http://wiki.ros.org/rviz/UserGuide
tf
urdf
http://wiki.ros.org/urdf/Tutorials
actionlib
navigation
http://wiki.ros.org/navigation
moveit!
-End-
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/51546731

- 点赞
- 收藏
- 关注作者
评论(0)