ROS机器人程序设计(原书第2版)补充资料 (贰) 第二章 ROS系统架构及概念

ROS机器人程序设计(原书第2版)补充资料 (贰) 第二章 ROS系统架构及概念
书中,大部分出现hydro的地方,直接替换为indigo或jade或kinetic,即可在对应版本中使用。
由于工作事物繁忙,更新有些慢,抱歉。
已经完成的各章节补充说明,会依据反馈意见持续更新,希望大家多提宝贵意见,非常感谢。
在完成了第一章的学习实现之后,基本已经掌握了ROS系统的安装,那么如何使用ROS,理解系统架构和概念,这是第二章的内容。hydro-indigo-kinetic通用概念不做区分。
如果使用IDEs进行ROS开发环境构建,推荐:http://wiki.ros.org/IDEs
RoboWare Studio:http://www.roboware.me
补充参考:http://blog.csdn.net/zhangrelay/article/details/49893069
书中2.4.10中,节点示例有一些变化,如下:
-
~$ rosrun chapter2_tutorials chap
-
chap2_example1_a chap2_example2_a chap2_example3_a chap2_example4
-
chap2_example1_b chap2_example2_b chap2_example3_b
第16页:
理解ROS文件层次--综合包--包--等
第17页:
工作空间(重点)catkin_ws 当然也可以配置spark_ws等,
如果经常使用,注意在.bashrc中配置好环境。包括但不限于如下:
-
export JAVA_HOME=/opt/jdk/java
-
export JRE_HOME=${JAVA_HOME}/jre
-
export CLASSPATH=.:${JAVA_HOME}/lib:${JRE_HOME}/lib
-
export PATH=${JAVA_HOME}/bin:$PATH
-
export PYTHONPATH=$PYTHONPATH:/home/exbot/LeapDeveloper/LeapSDK:/home/exbot/LeapDeveloper/LeapSDK/lib:/home/exbot/LeapDeveloper/LeapSDK/lib/x64
-
export LEAP_SDK=/home/exbot/LeapDeveloper/LeapSDK
-
export VREP_ROOT_DIR=/home/exbot/V-REP_PRO_EDU_V3_3_1_64_Linux/
-
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:/home/exbot/catkin_ws/src
-
source /opt/ros/indigo/setup.bash
-
source /home/exbot/catkin_ws/devel/setup.bash
-
source /home/exbot/spark_ws/devel/setup.bash
-
#set up G2O
-
export G2O_ROOT=/home/exbot/Rob_Soft/g2o-master
-
export G2O_BIN=${G2O_ROOT}/bin
-
export G2O_LIB=${G2O_ROOT}/lib
-
export LD_LIBRARY_PATH=${G2O_LIB}:${LD_LIBRARY_PATH}
-
export PATH=${G2O_BIN}:${PATH}
-
export NVM_DIR="/home/exbot/.nvm"
-
[ -s "$NVM_DIR/nvm.sh" ] && . "$NVM_DIR/nvm.sh" # This loads nvm
理解功能包,综合功能包,消息,服务的基本组成结构,常用指令,数据类型等。
层次及包含关系。
第22页:
计算图级:节点等。主题等之间通信和数据流向。
第23页:
节点概念与常用指令。
第24页:
主题概念与常用指令。
第25页:
服务概念与常用指令。
第26-27页:
消息,记录包,节点管理器,参数服务器等。
第28页:
ROS开源社区简介。
使用练习:hydro-indigo-kinetic差别不大:
如indigo版:
-
exbot@relay-Aspire-4741:~$ rospack find turtlebot_navigation
-
/opt/ros/indigo/share/turtlebot_navigation
有些在github上的功能包,是hydro版本的,已经不更新了,但是稍微修改下甚至不修改,通过源码编译可以用于indigo和kinetic版。
需要熟悉常用指令,rospack,rosstack,rosls,roscd,通常是linux常用终端命令前加ros
第29页:
创建工作空间。需要熟练掌握,hydro之后版本类似。
第30页:
创建并编译功能包等。
第31页:
安装独立功能包,注意各版本区别,hydro,indigo和kinetic:
exbot@relay-Aspire-4741:~$ sudo apt-get install ros-indigo-turtlebot-gazebo
roscore
使用roslaunch可以忽略上步。下面会细说使用.launch一次启动多个节点。
第32页:
使用rosnode。
-
rqt_action rqt_pose_view
-
rqt_bag rqt_publisher
-
rqt_bag_plugins rqt_py_common
-
rqt_console rqt_py_console
-
rqt_dep rqt_reconfigure
-
rqt_graph rqt_robot_dashboard
-
rqt_gui rqt_robot_monitor
-
rqt_gui_cpp rqt_robot_steering
-
rqt_gui_py rqt_runtime_monitor
-
rqt_image_view rqt_rviz
-
rqt_joint_trajectory_controller rqt_service_caller
-
rqt_launch rqt_shell
-
rqt_logger_level rqt_srv
-
rqt_moveit rqt_tf_tree
-
rqt_msg rqt_top
-
rqt_nav_view rqt_topic
-
rqt_plot rqt_web
第33-35页:
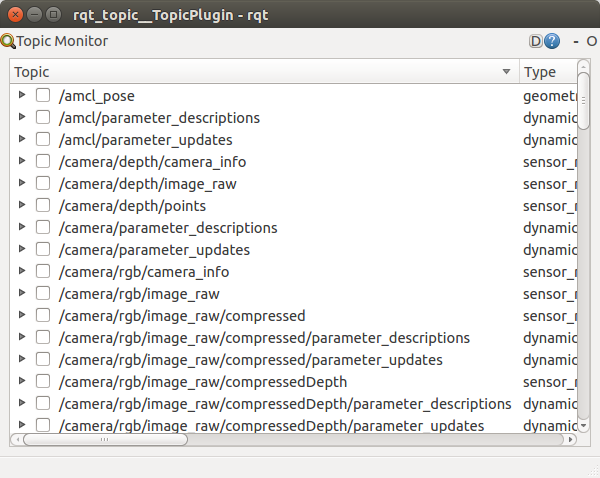
使用rostopic。
补充除了书上介绍的指令,也可以使用图形界面。
exbot@relay-Aspire-4741:~$ rosrun rqt_topic rqt_topic
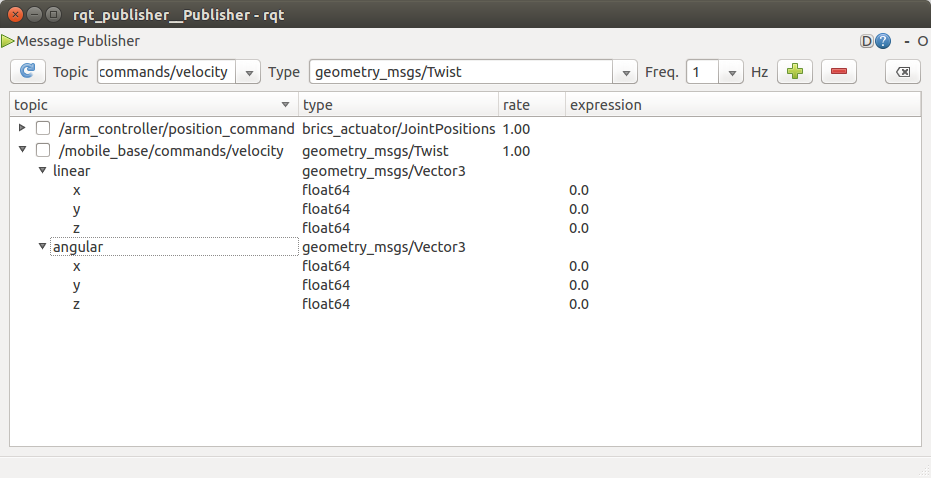
发布主题也可以使用:
exbot@relay-Aspire-4741:~$ rosrun rqt_publisher rqt_publisher
其他功能自己探索,乐趣多多。
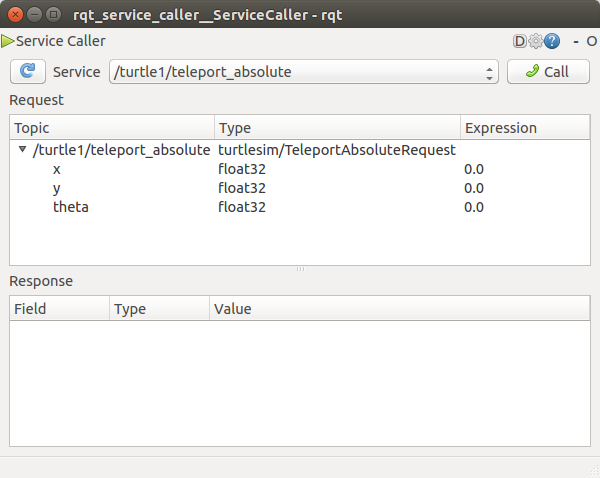
第36-37页:
使用服务,补充如下:
exbot@relay-Aspire-4741:~$ rosrun rqt_service_caller rqt_service_caller
参数服务。
第39-40页:
学习用C++写一个简单节点。
第41-42页:
编译节点。
第43页:
创建msg和srv文件。
第44-47页:
使用msg和srv文件。
第48-49页:
启动文件roslaunch。
补充可以尝试练习,用一个launch启动,海龟并画圆。文末给出答案。
第50-53页:
动态参数。
第54页:
本章总结。
思考与巩固:
1 熟练掌握ROS系统架构及概念
2 nodelet使用
参考:
2.1 官网:http://wiki.ros.org/nodelet
2.2 kint_zhao博客:http://blog.csdn.net/zyh821351004/article/details/52143309
3 启动文件.launch
第二章所用到的指令在hydro,indigo,jade,kinetic中均通用的,这章内容是ROS非常重要的基础。
附:
1 使用多个终端,启动roscore和小海龟,并画方形。如下:
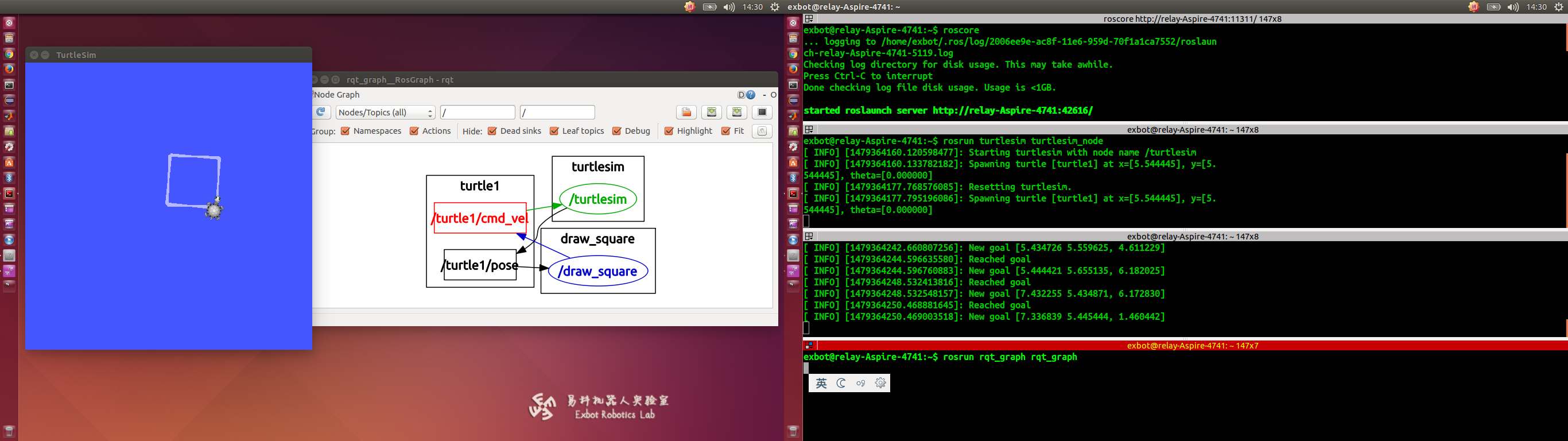
2 使用roslaunch
下面是配置:
-
<!--turtlesim drawsquare launch-->
-
<launch>
-
-
<node name="turtlesim_node1" pkg="turtlesim" type="turtlesim_node"/>
-
<node name="turtlesim_node2" pkg="turtlesim" type="turtlesim_node"/>
-
<node name="draw_square" pkg="turtlesim" type="draw_square"/>
-
<node name="rqt_graph" pkg="rqt_graph" type="rqt_graph"/>
-
-
</launch>
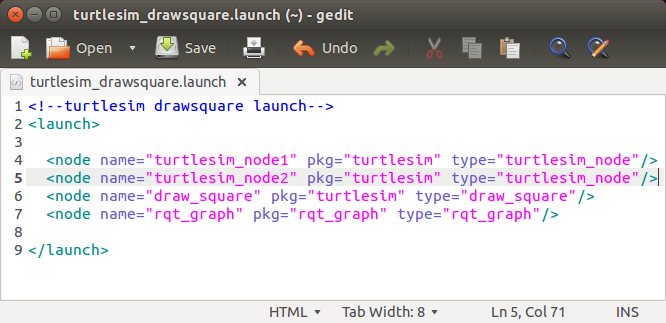
直接在终端,输入:
~$ roslaunch turtlesim_drawsquare.launch

文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/53184684

- 点赞
- 收藏
- 关注作者
评论(0)