ROS机器人程序设计-学习小结-

学习ROS相关书籍推荐:http://blog.csdn.net/zhangrelay/article/details/52244746
ROS机器人的内容比较多而杂,多看官网wiki和外文书籍会有很大帮助,C++和Python都需要用到。
系统地学习必不可少,千万不可贪图速成,否则看完教程,可能会有茫然无措之感。
由于机器人仿真技术的飞速发展,没有实际机器人平台也可以很好的学习ROS的大部分内容。
不论仿真还是真实机器人,也不管底层是arduino还是stm32,或者直接tk1等,检验自己是否真正入门ROS的方法,
快速实现一台移动机器人在室内的路径规划或一台机械臂在空间的运动控制,比如抓取物体,并放置于另一位置。
如果能做到,就基本算是入门ROS了,感觉自己才刚刚入门。
自己搭建过一个稀烂的两轮小车(之前博客写过),如果需要硬件学习ROS。
推荐turtlebot,handsfree,Spark,这三款平台都非常不错。
turtlebot:http://wiki.ros.org/Robots/TurtleBot
handsfree:http://www.rosclub.cn/


认真看了一下星火计划进阶课程的目录,并对照ROS机器人程序设计(原书第2版)如下:
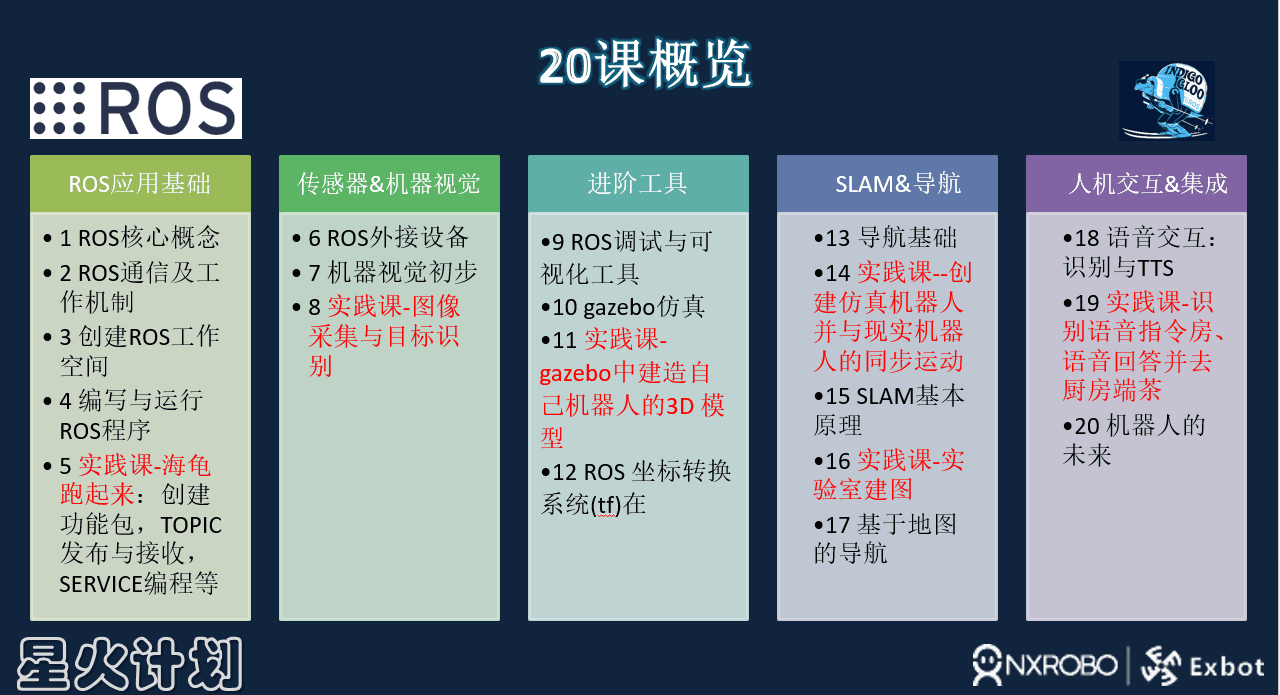
第1-5课:参考书1-2章
第6课:参考书4章
第7-8课:参考书5-6章
第9课:参考书3章
第10-11课:参考书7章
第12-17课:参考书8-9章
第18-20课:本书无参考章节,但网上有对应中英文资料,使用科大讯飞和百度语音可实现中文交互。
书10章:无参考课程,可查阅MoveIt!官网学习工业机器人相关内容。
具体内容不多说,交流群和相关博客有详细的介绍。
课程学习有真实机器人效果更好,书中只涉及仿真机器人通用性更广。
学习ROS最深的感受,资料太多,多用英文去查找自己遇到的问题,wiki上一般都有解决方案的。
-END-
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/53308057

- 点赞
- 收藏
- 关注作者
评论(0)