
ROS-Industrial Consortium的目的之一是生成和维护ROS-Industrial的技术路线图。这项工作在2014年开始,使用一个大致遵循Sandia国家实验室路线图技术基础的过程。总之,步骤包括:
- 定义范围和参与者
- 创造产品/技术的共同愿景
- 确定利益相关者要求
- 定义技术领域
- 确定替代方案和差距
- 推荐路径向前
- 评估路线图
- 制定实施计划
路线图的参与者是ROS-Industrial Consortium的成员,他们通常每天参与制造。ROS-Industrial的愿景(步骤2)是为制造自动化开发提供一个开放和灵活的框架:
- 支持先进的机器人制造能力
- 标准化接口以实现跨平台兼容性
- 将组件模块化和扩展到更大的系统
- 启用协作开发环境
- 通过培训课程和实践课程培养劳动力
- 通过开源许可转让技术并降低实施成本
- 提高制造生产率
- 改善工人福利
为了识别技术的利益相关者需求(步骤3),我们开始收集需要高级软件的高优先级目前和未来机器人自动化使用案例,以启用它们。从那里我们倒退,逆向工程每个应用程序,列举组装解决方案所需的技术构建块(参见下面的移动材料处理示例)。
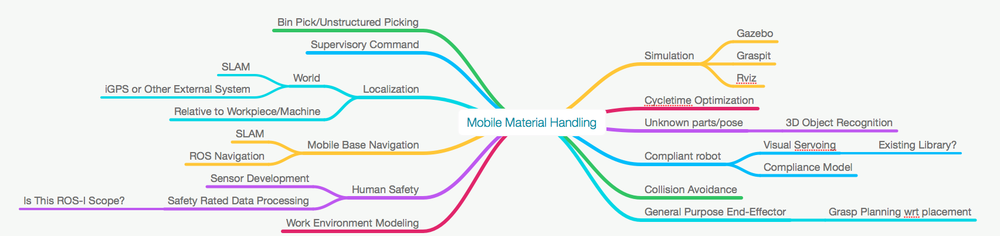
移动材料处理应用程序的构建块的示例分解。
然后,我们寻求这些构件之间的共性,作为定义技术领域(步骤4)和优先级(下面)的一种手段。
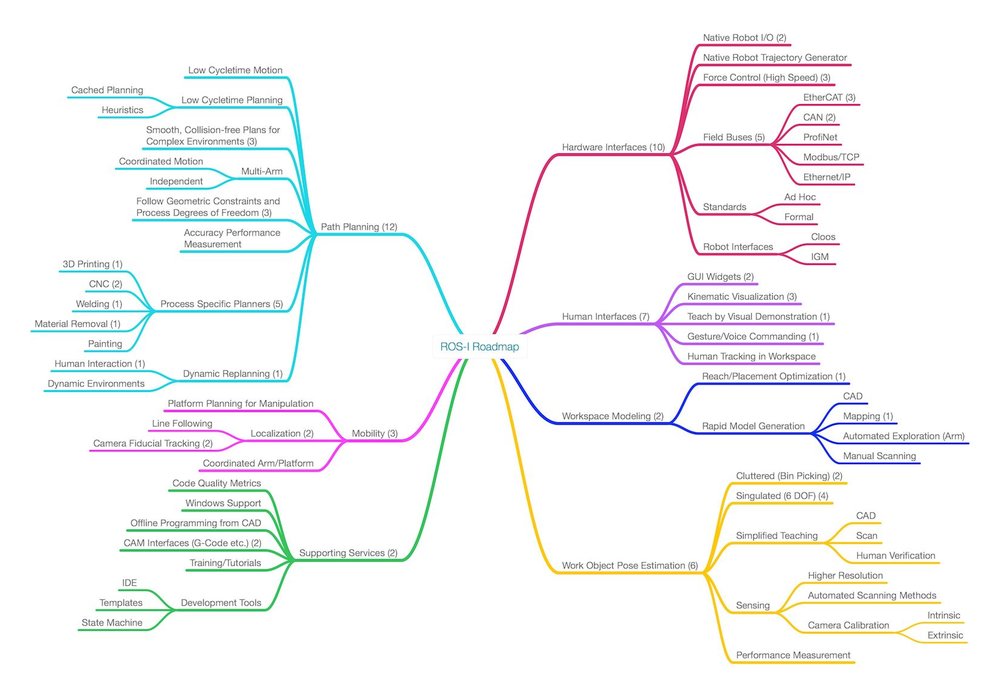
技术领域确定
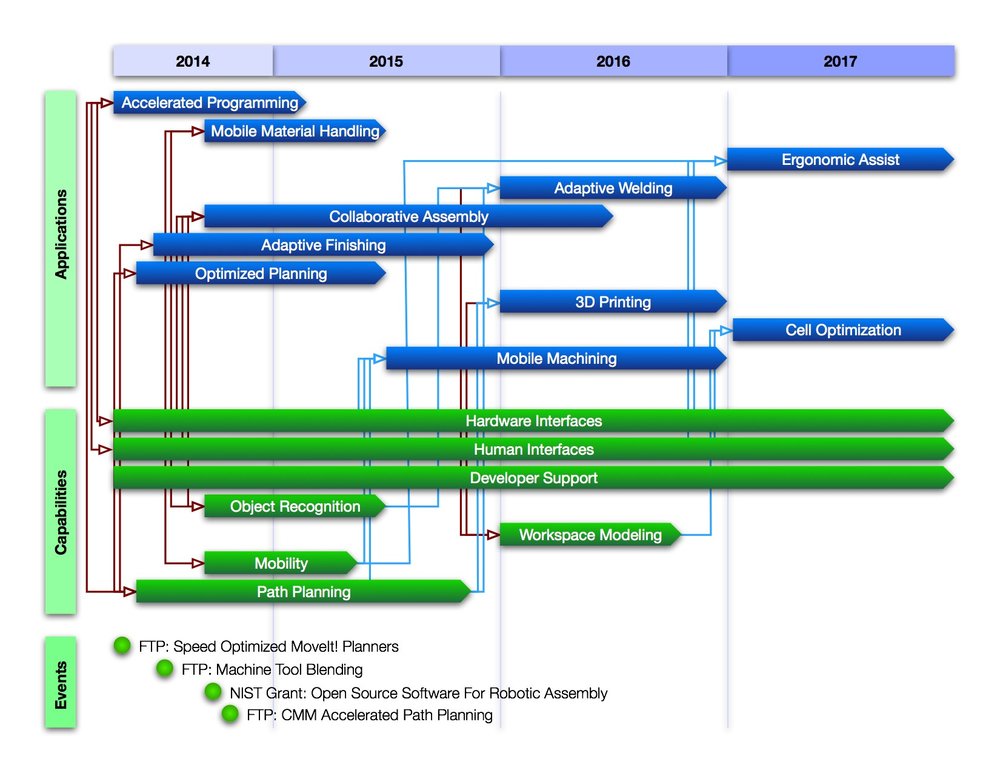
由此产生的路线图文件确定了每个技术领域的备选方案和差距并提出建议(步骤5-6)。为了可视化路线图,我们将数据呈现为传统的时间线(参见下图)。虽然我们在大多数预期领域取得进展,但如果没有类似的保证预算,就不可能保证具体进展。
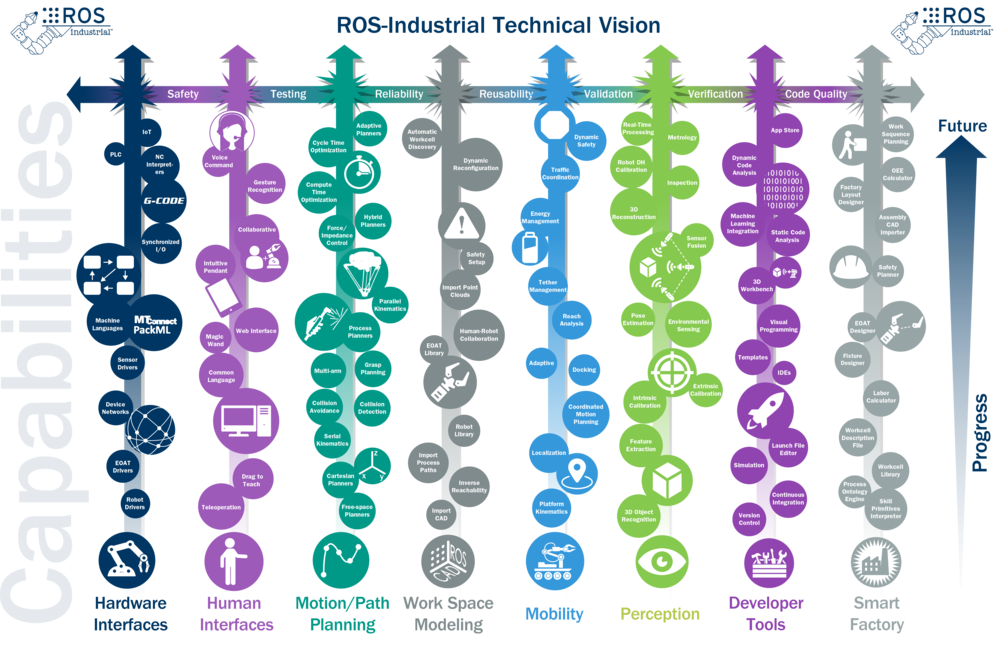
在2016年,在收到我们的国际合作者和新成员的额外投入后,我们尝试刷新此路线图,并生成了附加的信息图表,将技术领域与时间箭头融合在单个图形中(如下图所示)。技术推力按照优先级顺序垂直排列(基础能力从底部开始,向上靠近高复杂度和/或依赖目标上升)。我们还添加了具有软件质量和可靠性特性的正交轴,以指示所有功能的横切目标。在2017年初,ROS-I信息图的这一愿景通过我们联盟咨询委员会的投票批准。

评论(0)