在ROS Kinetic和Gazebo 8中使用智能汽车仿真演示 智能车无人驾驶技术是目前人工智能和机器人技术的研究热点,有许多开源平台可以使我们零基础零成本入门无人驾驶技术
Gazebo:
RVIZ:
1. Docker安装 请参考https://www.docker.com 官网和CSDN相关博客。
2. nvidia-docker安装 请参考文末附录。如果出现如下错误,请按附录内容进行修正:
$ nvidia-docker run -ti --rm nvidia/cuda
nvidia-docker | 2017/07/06 13:13:17 Error: unsupported CUDA version: driver 6.5 < image 8.0.61
3. 配置和使用ROS/Gazebo中的Prius示例
$ ./build_demo.bash
----
relaybot@relaybot-desktop:~/Rob_Soft/car_demo-master$ ./build_demo.bash
[sudo] password for relaybot:
Sending build context to Docker daemon 58.96MB
Step 1/12 : FROM osrf/ros:kinetic-desktop
Step 2/12 : LABEL com.nvidia.volumes.needed "nvidia_driver"
Step 3/12 : ENV PATH /usr/local/nvidia/bin:${PATH}
Step 4/12 : ENV LD_LIBRARY_PATH /usr/local/nvidia/lib:/usr/local/nvidia/lib64:${LD_LIBRARY_PATH}
Step 5/12 : RUN apt-get update && apt-get install -y wget lsb-release sudo mesa-utils && apt-get clean
Step 6/12 : RUN echo "deb http://packages.osrfoundation.org/gazebo/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/gazebo-stable.list && wget http://packages.osrfoundation.org/gazebo.key -O - | apt-key add - && apt-get update && apt-get install -y gazebo8 ros-kinetic-gazebo8-ros-pkgs ros-kinetic-fake-localization ros-kinetic-joy && apt-get clean
Step 7/12 : RUN mkdir -p /tmp/workspace/src
Step 8/12 : COPY prius_description /tmp/workspace/src/prius_description
Step 9/12 : COPY prius_msgs /tmp/workspace/src/prius_msgs
Step 10/12 : COPY car_demo /tmp/workspace/src/car_demo
Step 11/12 : RUN /bin/bash -c 'cd /tmp/workspace && source /opt/ros/kinetic/setup.bash && catkin_make'
Step 12/12 : CMD /bin/bash -c source /opt/ros/kinetic/setup.bash && source /tmp/workspace/devel/setup.bash && roslaunch car_demo demo.launch
Successfully built 20890ac15cee
Successfully tagged osrf/car_demo:latest
relaybot@relaybot-desktop:~/Rob_Soft/car_demo-master$
----
$ ./run_demo.bash
CONTAINER ID IMAGE COMMAND CREATED STATUS PORTS NAMES
... logging to /root/.ros/log/31d9adfa-620b-11e7-a113-0242ac110002/roslaunch-a0950e425e8e-82.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http: //a0950e425e8e:37129 /
* /joy_node0 /dev: /dev /input /js0
* /joy_node1 /dev: /dev /input /js1
* /robot_description: <?xml version ="1....
fake_localization (fake_localization/fake_localization)
gazebo (gazebo_ros/gzserver)
gazebo_gui (gazebo_ros/gzclient)
joystick_translator (car_demo/joystick_translator)
robot_state_publisher (robot_state_publisher/robot_state_publisher)
spawn_urdf (gazebo_ros/spawn_model)
very_inaccurate_odom (tf2_ros/static_transform_publisher)
process[master]: started with pid [93]
ROS_MASTER_URI=http://localhost:11311
setting /run_id to 31d9adfa-620b-11e7-a113-0242ac110002
process[rosout-1]: started with pid [106]
started core service [/rosout]
process[gazebo-2]: started with pid [109]
process[gazebo_gui-3]: started with pid [113]
process[robot_state_publisher-4]: started with pid [142]
process[fake_localization-5]: started with pid [195]
process[very_inaccurate_odom-6]: started with pid [196]
process[joystick_translator-7]: started with pid [255]
process[joy_node0-8]: started with pid [299]
process[joy_node1-9]: started with pid [300]
Gazebo multi-robot simulator, version 8.1.1
Copyright (C) 2012 Open Source Robotics Foundation.
Released under the Apache 2 License.
process[spawn_urdf-10]: started with pid [328]
process[rviz-11]: started with pid [356]
[ INFO] [1499318590.218434440]: Finished loading Gazebo ROS API Plugin.
[Msg] Waiting for master.
[ INFO] [1499318590.220829714]: waitForService: Service [/gazebo/set_physics_properties] has not been advertised, waiting...
[Msg] Connected to gazebo master @ http://127.0.0.1:11345
[Msg] Publicized address: 172.17.0.2
[Wrn] [ColladaLoader.cc:1804] Triangle input semantic: 'TEXCOORD' is currently not supported
[Wrn] [ColladaLoader.cc:1804] Triangle input semantic: 'TEXCOORD' is currently not supported
[Wrn] [ColladaLoader.cc:1804] Triangle input semantic: 'TEXCOORD' is currently not supported
[Wrn] [ColladaLoader.cc:1804] Triangle input semantic: 'TEXCOORD' is currently not supported
[Wrn] [ColladaLoader.cc:1804] Triangle input semantic: 'TEXCOORD' is currently not supported
[spawn_urdf-10] process has finished cleanly
log file: /root/.ros/log/31d9adfa-620b-11e7-a113-0242ac110002/spawn_urdf-10*.log
[ INFO] [1499318597.020363774, 1341.708000000]: Camera Plugin: Using the 'robotNamespace' param: '/'
[ INFO] [1499318597.029090560, 1341.708000000]: Camera Plugin (ns = /) <tf_prefix_>, set to "
[ WARN ] [1499318597.051198614 , 1341.708000000 ]: Range plugin missing <radiation > , defaults to ultrasound
[ WARN] [1499318597.051501949, 1341.708000000]: Range plugin missing <fov > , defaults to 0.05
[ INFO] [1499318597.051634287, 1341.708000000]: Range plugin missing <gaussianNoise > , defaults to 0.0
[ INFO] [1499318597.051772773, 1341.708000000]: Range plugin missing <updateRate > , defaults to 0
[ WARN] [1499318597.071652157, 1341.708000000]: Range plugin missing <radiation > , defaults to ultrasound
[ WARN] [1499318597.071737149, 1341.708000000]: Range plugin missing <fov > , defaults to 0.05
[ INFO] [1499318597.071765174, 1341.708000000]: Range plugin missing <gaussianNoise > , defaults to 0.0
[ INFO] [1499318597.071788477, 1341.708000000]: Range plugin missing <updateRate > , defaults to 0
[ WARN] [1499318597.074830942, 1341.708000000]: Range plugin missing <radiation > , defaults to ultrasound
[ WARN] [1499318597.075126204, 1341.708000000]: Range plugin missing <fov > , defaults to 0.05
[ INFO] [1499318597.075418562, 1341.708000000]: Range plugin missing <gaussianNoise > , defaults to 0.0
[ INFO] [1499318597.075720639, 1341.708000000]: Range plugin missing <updateRate > , defaults to 0
[ WARN] [1499318597.089499716, 1341.708000000]: Range plugin missing <radiation > , defaults to ultrasound
[ WARN] [1499318597.090064739, 1341.708000000]: Range plugin missing <fov > , defaults to 0.05
[ INFO] [1499318597.090382446, 1341.708000000]: Range plugin missing <gaussianNoise > , defaults to 0.0
[ INFO] [1499318597.090626321, 1341.708000000]: Range plugin missing <updateRate > , defaults to 0
[ INFO] [1499318603.934692266, 1341.708000000]: Block laser plugin missing <gaussianNoise > , defaults to 0.0
[ INFO] [1499318603.934773061, 1341.708000000]: Block laser plugin missing <hokuyoMinIntensity > , defaults to 101
[ INFO] [1499318603.934847668, 1341.708000000]: Block laser plugin missing <updateRate > , defaults to 0
[ INFO] [1499318604.031684097, 1341.708000000]: Camera Plugin: Using the 'robotNamespace' param: '/'
[ WARN] [1499318604.036142916, 1341.708000000]: Range plugin missing <radiation > , defaults to ultrasound
[ WARN] [1499318604.036419387, 1341.708000000]: Range plugin missing <fov > , defaults to 0.05
[ INFO] [1499318604.036500172, 1341.708000000]: Range plugin missing <gaussianNoise > , defaults to 0.0
[ INFO] [1499318604.036576326, 1341.708000000]: Range plugin missing <updateRate > , defaults to 0
[ INFO] [1499318604.048912318, 1341.708000000]: Camera Plugin (ns = /) <tf_prefix_ > , set to ""
[ INFO] [1499318604.601344650, 1341.708000000]: Laser Plugin: Using the 'robotNamespace' param: '/'
[ INFO] [1499318604.602166296, 1341.708000000]: Starting Laser Plugin (ns = /)!
[ INFO] [1499318604.609125255, 1341.708000000]: Laser Plugin (ns = /) <tf_prefix_ > , set to ""
[ WARN] [1499318604.622696602, 1341.708000000]: Range plugin missing <radiation > , defaults to ultrasound
[ WARN] [1499318604.622786468, 1341.708000000]: Range plugin missing <fov > , defaults to 0.05
[ INFO] [1499318604.622838959, 1341.708000000]: Range plugin missing <gaussianNoise > , defaults to 0.0
[ INFO] [1499318604.622875155, 1341.708000000]: Range plugin missing <updateRate > , defaults to 0
[ WARN] [1499318604.675410176, 1341.708000000]: Range plugin missing <radiation > , defaults to ultrasound
[ WARN] [1499318604.675486412, 1341.708000000]: Range plugin missing <fov > , defaults to 0.05
[ INFO] [1499318604.675527058, 1341.708000000]: Range plugin missing <gaussianNoise > , defaults to 0.0
[ INFO] [1499318604.675556004, 1341.708000000]: Range plugin missing <updateRate > , defaults to 0
[ INFO] [1499318605.145527632, 1341.708000000]: Laser Plugin: Using the 'robotNamespace' param: '/'
[ INFO] [1499318605.145614241, 1341.708000000]: Starting Laser Plugin (ns = /)!
[ INFO] [1499318605.154089749, 1341.708000000]: Laser Plugin (ns = /) <tf_prefix_ > , set to ""
[ WARN] [1499318605.158758063, 1341.708000000]: Range plugin missing <radiation > , defaults to ultrasound
[ WARN] [1499318605.158840499, 1341.708000000]: Range plugin missing <fov > , defaults to 0.05
[ INFO] [1499318605.158877742, 1341.708000000]: Range plugin missing <gaussianNoise > , defaults to 0.0
[ INFO] [1499318605.158909882, 1341.708000000]: Range plugin missing <updateRate > , defaults to 0
[ INFO] [1499318605.244331364, 1341.708000000]: Camera Plugin: Using the 'robotNamespace' param: '/'
[ INFO] [1499318605.260901986, 1341.708000000]: Camera Plugin: Using the 'robotNamespace' param: '/'
[ INFO] [1499318605.268178012, 1341.708000000]: Camera Plugin (ns = /) <tf_prefix_ > , set to ""
[ INFO] [1499318605.295667008, 1341.708000000]: Camera Plugin (ns = /) <tf_prefix_ > , set to ""
[Wrn] [PriusHybridPlugin.cc:361] PriusHybridPlugin loading params
[ INFO] [1499318605.487444516, 1341.708000000]: GazeboRosJointStatePublisher is going to publish joint: rear_right_wheel_joint
[ INFO] [1499318605.487560947, 1341.708000000]: GazeboRosJointStatePublisher is going to publish joint: rear_left_wheel_joint
[ INFO] [1499318605.487821573, 1341.708000000]: GazeboRosJointStatePublisher is going to publish joint: front_right_wheel_joint
[ INFO] [1499318605.487860817, 1341.708000000]: GazeboRosJointStatePublisher is going to publish joint: front_left_wheel_joint
[ INFO] [1499318605.487897223, 1341.708000000]: GazeboRosJointStatePublisher is going to publish joint: front_right_steer_joint
[ INFO] [1499318605.487938402, 1341.708000000]: GazeboRosJointStatePublisher is going to publish joint: front_left_steer_joint
[ INFO] [1499318605.487983362, 1341.708000000]: GazeboRosJointStatePublisher is going to publish joint: steering_joint
[ INFO] [1499318605.488209156, 1341.708000000]: Starting GazeboRosJointStatePublisher Plugin (ns = //)!, parent name: prius
[ INFO] [1499318605.694392977, 1341.729000000]: waitForService: Service [/gazebo/set_physics_properties] is now available.
[ INFO] [1499318605.875331513, 1341.751000000]: Physics dynamic reconfigure ready.
[Wrn] [Publisher.cc:141] Queue limit reached for topic /gazebo/default/pose/local/info, deleting message. This warning is printed only once.
----
----详细过程如下----
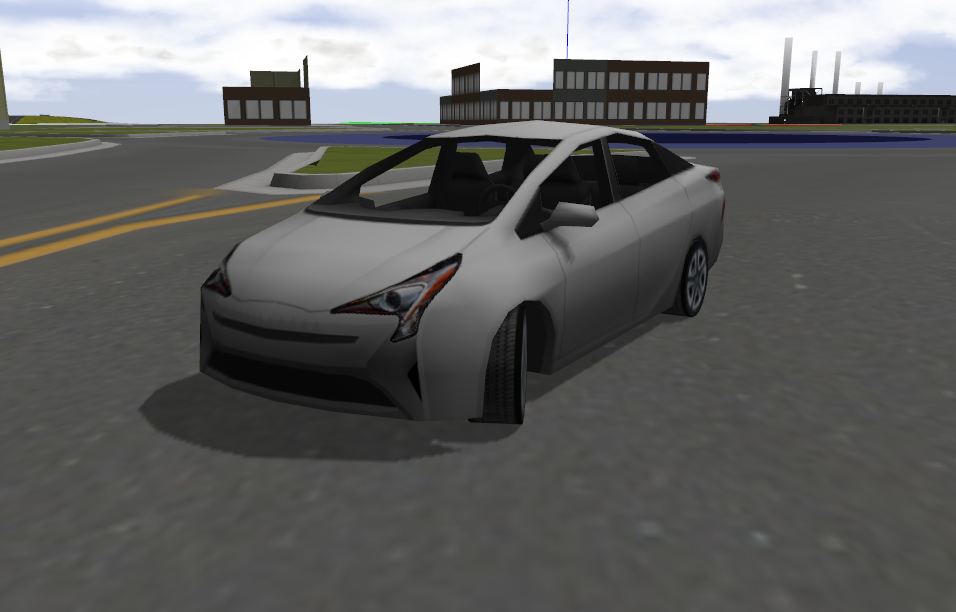
ROS / GAZEBO中的Prius演示
这是 使用 ROS kinetic 发布的传感器数据的 gazebo 8 中的Prius 的模拟。 通过发布ROS消息来控制汽车的节气门,制动器,转向和换档。 ROS节点允许使用游戏手柄或操纵杆进行驾驶。
要求(基本) 该演示已经在Ubuntu Xenial(16.04)
推荐(选配)
一个操纵杆 创建到 /dev/input/js0或的 链接的操纵杆驱动程序 /dev/input/js1
编译 首先克隆repo,然后运行脚本 build_demo.bash。 它使用本地源代码构建了一个docker映像。
运行 将游戏控制器连接到您的电脑。 使用脚本 run_demo.bash运行演示。
$ ./run_demo.bash
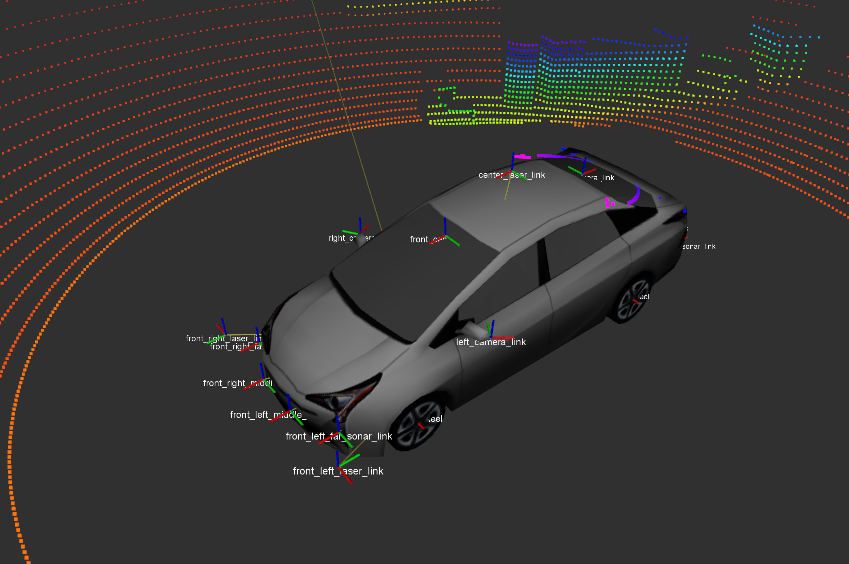
一个 RVIZ 窗口将打开,显示汽车和传感器输出。 将出现一个Gazebo窗口,显示模拟。 使用控制器驱动世界各地的prius,或者点击Gazebo窗口并使用 WASD钥匙来驾驶汽车。
如果使用Logitech F710控制器:
确保MODE状态指示灯熄灭 将swtich设置为XInput模式 右侧杆控制油门和制动器 左键控制转向 Y把车放进DRIVE A把车放进REVERSE B把车放到中性
----
先看效果:
Gazebo:
參考網址:
1. http://www.ros.org/news/2017/06/simulated-car-demo.html
2. https://github.com/NVIDIA/nvidia-docker
----
从OSRF博客转载
我们很高兴用ROS Kinetic和Gazebo 8展示Mcity的Prius仿真。ROS使用现有的软件和库可以更快地开发模拟。车辆的节气门,制动器,转向和变速器通过发布到ROS主题进行控制。所有传感器数据都是使用ROS发布的,可以使用RViz进行可视化。
我们利用Gazebo 8的功能来整合现有的模型和传感器。仿真世界(环境)包含了一个新型的Mcity和交汇高速公路。还有来自Gazebo模型库的模型,包括垃圾箱,交通锥和加油站。在车辆本身上,屋顶上有一个16束激光雷达,8个超声波传感器,4个摄像头和2个平面激光雷达。
仿真模拟是开源的,可以在osit / osdf / car_demo上的GitHub上获得 。通过安装nvidia-docker并从Docker Hub拉出“osrf / car_demo”来尝试。有关构建和运行的更多信息,请参阅源存储库中的README。
----
NVIDIA Docker
该存储库包括构建和运行NVIDIA Docker映像的实用程序。
CUDA如何与Docker集成的示例
文档 完整的文档可在 存储库wiki中找到 。 首先要了解 为什么 需要 NVIDIA Docker,这 是 一个很好的开始 。
快速开始 假设NVIDIA驱动程序和Docker已正确安装(请参阅 安装 )
Ubuntu发行版
# 安装nvidia-docker和nvidia-docker-plugin
wget -P / tmp https://github.com/NVIDIA/nvidia-docker/releases/download/v1.0.1/nvidia-docker_1.0.1-1_amd64.deb
sudo dpkg - i / tmp / nvidia-docker * .deb && rm / tmp / nvidia-docker * .deb # 测试nvidia-smi
nvidia-docker运行--rm nvidia / cuda nvidia-smi
----
先决条件
运行的先决条件列表 nvidia-docker如下所示。 有关如何为您的Linux发行版安装Docker的信息,请参阅 Docker文档 。
GNU / Linux x86_64,内核版本> 3.10 多克尔> = 1.9(官方 docker-engine, docker-ce或 docker-ee仅) NVIDIA GPU与架构>费米(2.1) NVIDIA驱动程序 > = 340.29与二进制 nvidia-modprobe
您的驱动程序版本可能会限制您的CUDA功能(请参阅 CUDA要求 )
从二进制包安装 二进制包可在 发行页面 上下载 。
软件包安装将自动设置 nvidia-docker-plugin并根据您的分发,将其注册到init系统。
从源头构建 在存储库问题的根目录 make或 make install构建二进制文件。 稍后还将在由环境变量设置的位置 prefix( /usr/local默认情况下)处理 二进制文件 。 您必须 nvidia-docker-plugin手动 启动 此方法:
sudo -b nohup nvidia-docker-plugin
或者,您可以 为您的发行版 使用 make deb或 make rpm生成deb / rpm软件包。 软件包安装将自动设置 nvidia-docker-plugin并根据您的分发,将其注册到init系统。
make clean并 make distclean分别清理构建和分配环境。
----
需要注意,依据驱动类型和显卡型号选择合适的CUDA版本:
CUDA图像有两种口味,可通过 NVIDIA公共中心库存储 。
runtime:一个轻量级的图像,包含最低限度,部署使用CUDA的预构建应用程序。 devel:通过添加编译器工具链,调试工具和标准CUDA库的开发文件来扩展运行时映像。 使用此映像从源代码编译CUDA应用程序。
要求 运行CUDA容器需要一台具有至少一个支持CUDA功能的GPU和与您使用的CUDA工具包版本兼容的驱动程序。 运行CUDA容器的机器 只需要NVIDIA驱动程序 ,不需要安装CUDA工具包。
NVIDIA驱动程序 向后兼容 CUDA工具包版本
CUDA工具包版本 驱动程序版本 GPU架构
6.5 > = 340.29 > = 2.0(费米)
7 > = 346.46 > = 2.0(费米)
7.5 > = 352.39 > = 2.0(费米)
8 = 361.93或> = 375.51 == 6.0(P100)
8 > = 367.48 > = 2.0(费米)
例子 看一下 样本部分 ,找到编译简单CUDA应用程序的Dockerfiles示例。
# 运行交互式CUDA会话隔离第一个GPU
NV_GPU = 0 nvidia-docker运行-ti --rm nvidia / cuda # 查询CUDA 7.5编译器版本
nvidia-docker运行--rm nvidia / cuda:7.5-devel nvcc --version
----
挑战
安装用户级驱动程序库和设备文件会破坏容器的环境,只有当容器运行GPU应用程序时才应该执行。 这里的挑战是确定给定的图像是否将使用GPU。 我们还应该防止基于与主机NVIDIA驱动程序版本不兼容的Docker映像启动容器,您可以在此 wiki页面 上找到更多详细信息 。
NVIDIA-泊坞窗 没有通用的解决方案来检测是否有任何图像将使用GPU代码。 在 nvidia-docker我们假设基于我们的 nvidia/cuda图像(DockerHub上可用)的 任何图像 将是GPU应用程序,因此它们需要驱动程序卷和设备文件。 更具体地说,当 nvidia-docker run使用时,我们检查在命令行上指定的图像。 在此图像中,我们查找 标签 的存在和值 com.nvidia.volumes.needed。 nvidia/cuda我们提供 的 图像 开始时 都包含这个标签 。 所有执行此操作的Dockerfiles FROM nvidia/cuda将自动继承此元数据,从而可以无缝工作 nvidia-docker。
为了检测图像与主机驱动程序不兼容,我们依赖于第二个元数据 com.nvidia.cuda.version标签 。 此标签存在于每个CUDA基本图像中,并具有相应的版本号。 该版本与驱动程序支持的最大CUDA版本进行比较, 为此目的 nvidia-docker使用CUDA API函数 cudaDriverGetVersion。 如果驱动程序对于运行此版本的CUDA来说太旧了,则在启动容器之前会出现错误:
$ nvidia-docker run --rm nvidia/cuda
nvidia-docker | 2016 /04/ 21 21 :41 :35 Error: unsupported CUDA version: driver 7.0 < image 7.5
备择方案 在这种情况下, nvidia-docker不会简单地将参数注入 docker命令行。 因此,重现这种行为更复杂。 您将需要检查工作流中的图像或容器编排解决方案中的图像。 查看图像中的标签很简单:
$ docker inspect -f ' {{index .Config.Labels "com.nvidia.volumes.needed" }} ' nvidia/cuda
$ docker inspect -f '{{index .Config.Labels "com.nvidia.cuda.version" }} ' nvidia/cuda
如果您构建自己的自定义CUDA映像,建议您为兼容性原因重用相同的标签。
----
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/74534069







评论(0)