【 Notes 】INS Preliminary Introduction

INS uses accelerometers and gyroscopes to track the position, velocity, and the orientation of an object relative to a known starting point, velocity, and orientation.
INS使用加速度计和陀螺仪来跟踪物体相对于已知起点,速度和方向的位置,速度和方向。
Gyroscopes and accelerometers are motion - sensing devices that measure the rate of rotation (angular velocity) and linear acceleration, respectively [12] . Assuming the initial position, velocity, and orientation are known for the object of interest, the updated position, velocity, and orientation are determined by integrating the information received from motion sensors. Thus, the object can continuously track its position, velocity, and orientation without the need for external information.
陀螺仪和加速度计是运动传感装置,分别测量旋转速度(角速度)和线性加速度[12]。 假设对于感兴趣的对象已知初始位置,速度和方向,则通过对从运动传感器接收的信息进行积分来确定更新的位置,速度和方向。 因此,物体可以连续地跟踪其位置,速度和方向,而无需外部信息。
Actual spatial position and the movement of an object can be described by six parameters: three translational (linear acceleration in x , y , and z directions) and three rotational components (angular velocity in x , y , and z directions).
实际空间位置和物体的运动可以通过六个参数来描述:三个平移(x,y和z方向上的线性加速度)和三个旋转分量(x,y和z方向上的角速度)。
In order to define the movement of the object, three orthogonal accelerometers and three orthogonal gyroscopes are mounted on the object. An orthogonal accelerometer is an instrument that measures acceleration along a single axis. The three orthogonal accelerometers are arranged so that they measure the linear acceleration in the north – south, east – west, and vertical directions. The orthogonal gyroscopes are also known as “ integrating ” gyroscopes as their output is proportional to their angle of rotation about fixed axes.
为了定义物体的运动,在物体上安装三个正交加速度计和三个正交陀螺仪。 正交加速度计是一种测量单轴加速度的仪器。 布置三个正交加速度计,以便测量南北,东西和垂直方向的线性加速度。 正交陀螺仪也称为“积分”陀螺仪,因为它们的输出与它们绕固定轴的旋转角度成比例。
Mathematical integration of the acceleration a ( t ) yields the velocity v ( t ), which, in turn, is integrated to determine the distance traveled from the starting point r ( t ), as shown in Figure 1.3 b.
Figure 1.3 b
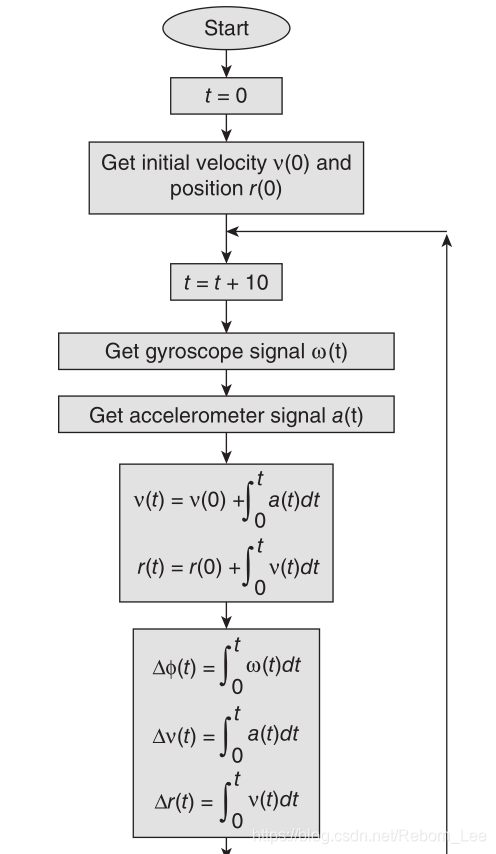

Orientation ϕ ( t ) can be found by integrating the angular velocity ω ( t ), also shown in Figure 1.3 b. These calculations are performed periodically to trace the movement of the object with respect to the global reference frame.
While undertaking the integration for the position of the object, acceleration due to gravity is subtracted from the vertical component of the acceleration.
方位 ϕ ( t ) 可以通过积分角速度 ω(t)找到,也如图1.3b所示。 周期性地执行这些计算以跟踪对象相对于全局参考系的移动。
在对物体的位置进行积分的同时,从加速度的垂直分量中减去由于重力引起的加速度。
The angular velocity and acceleration measurements made using motion sensors may have errors. When integrating these quantities, the errors in the measured values are propagated to the subsequently calculated position and orientation values. In addition, error is also introduced because the object numerically integrates the measurements at each time step. This error propagation in INS is called integration drift. The localization error can be adjusted to zero by a merger of the INS with other positioning systems such as GPS.
使用运动传感器进行的角速度和加速度测量可能有误差。 当对这些量进行积分时,测量值中的误差将传播到随后计算的位置和方向值。 此外,还引入了误差,因为对象在每个时间步长上数字地集成了测量值。 INS中的这种误差传播称为积分漂移。 通过INS与诸如GPS之类的其他定位系统的合并,可以将定位误差调整为零。
INS is used primarily by military to track submarines, warships, unmanned air vehicles, unmanned ground vehicles, missiles, airborne surveillance and navigation, search - and - rescue teams, artillery shells, and so on. In addition, INS can be used for civilian applications such as the estimation of position and the orientation of a moving robot, law enforcement, underground tunnels/mines, and underwater vehicles.
INS主要由军方用于跟踪潜艇,战舰,无人驾驶飞行器,无人驾驶地面车辆,导弹,机载监视和导航,搜救队,炮弹等。 此外,INS可用于民用应用,例如移动机器人的位置和方向估计,执法,地下隧道/矿井和水下交通工具。
INS Classification:
There are two types of INS: (1) stable platform systems and (2) strapdown systems. The difference between the two types is the frame of reference in which the gyroscopes and accelerometers operate. The frame of reference can be the body of the object or the global reference frame.
INS有两种类型:(1)稳定平台系统和(2)捷联系统。 两种类型之间的差异是陀螺仪和加速度计工作的参考系。 参照系可以是对象的主体或全局参考系。
Stable Platform System:
In this system, the motion sensors are mounted on a platform that is held constant with respect to the global frame of reference. This
is achieved by mounting the platform using gimbals, which allow the platform to rotate freely about all three axes. If the object rotates about any axis, the gyroscopes mounted on the platform send a feedback signal to the motor mounted on the appropriate gimbals. Based on the feedback signal, the appropriate motors rotate the gimbals in the opposite direction and cancel the effect of the object ’ s rotation on the platform. This keeps the platform aligned to the global reference frame at all times.
In order to track the orientation of the object, the angles between adjacent gimbals are measured and appropriate calculations are performed. To calculate the position of the object, the signals from the platform - mounted accelerometers are integrated as described earlier.
在该系统中,运动传感器安装在相对于全局参照系保持恒定的平台上。 这是通过使用万向节安装平台来实现的,平衡环允许平台围绕所有三个轴自由旋转。 如果物体围绕任何轴旋转,则安装在平台上的陀螺仪将反馈信号发送到安装在适当万向节上的电动机。 根据反馈信号,适当的电机使万向节沿相反方向旋转,并消除物体在平台上旋转的影响。 这使平台始终与全局参考系对齐。
为了跟踪物体的方向,测量相邻万向节之间的角度并进行适当的计算。 为了计算物体的位置,来自安装在平台上的加速度计的信号如前所述进行了整合。
Strapdown System:
In the strapdown system, the motion sensors are mounted rigidly on the object. Therefore, output quantities are measured in the body
frame of reference. For orientation calculations, the signals from gyroscopes are directly integrated as described earlier. However, for position calculations, the acceleration signals from the three accelerometers are projected on the global axes.
The projected accelerations are calculated by applying a 3 × 3 rotation matrix to the acceleration signals. The elements of the rotation matrix are generated using the orientation signals. These projected accelerations are then integrated to obtain the position of the object.
在捷联系统中,运动传感器刚性地安装在物体上。 因此,输出量在体参考系中测量。 对于定向计算,来自陀螺仪的信号如前所述直接集成。 但是,对于位置计算,来自三个加速度计的加速度信号被投影到全局轴上。
通过将3×3旋转矩阵应用于加速度信号来计算投影的加速度。 使用方向信号生成旋转矩阵的元素。 然后对这些投射的加速度进行积分以获得物体的位置。
Integrated INS and GPS
GPS signals may not be available at all times and at all places. Thus, INS can be used for reliable navigation by fi lling the gaps in measurements between two GPS position computations. The INS can also be used in case of GPS outages resulting from jamming, obscuration caused by maneuvering, and so on. In addition, GPS computations can also help in correcting the error propagation of the INS system.
集成的INS和GPS
GPS信号可能无法始终在所有地方都可用。 因此,INS可以通过填充两个GPS位置计算之间的测量间隙来用于可靠的导航。 INS还可以用于由于干扰导致的GPS中断,由机动引起的遮挡等。 此外,GPS计算还可以帮助校正INS系统的误差传播。
文章来源: reborn.blog.csdn.net,作者:李锐博恩,版权归原作者所有,如需转载,请联系作者。
原文链接:reborn.blog.csdn.net/article/details/84099102

- 点赞
- 收藏
- 关注作者
评论(0)