在Virtualbox虚拟机中配置使用ROS Spark机器人(Orbbec Astra 和 Xtion)

【摘要】 在虚拟机中配置使用ROS Spark,在Virtualbox中使用USB外设包括Orbbec Astra 和 Xtion深度摄像头和底盘。
虚拟机使用外接设备时,会遇到一些问题。不过随着虚拟机功能的逐渐完善,这些问题也得到了很大的改善。
1 需要在BIOS中设置开启与虚拟机相关的选项;
2 下载最新版本的虚拟机并安装增强功能;
Windows下系统设备驱动可以不装,无所谓的。...
在虚拟机中配置使用ROS Spark,在Virtualbox中使用USB外设包括Orbbec Astra 和 Xtion深度摄像头和底盘。
虚拟机使用外接设备时,会遇到一些问题。不过随着虚拟机功能的逐渐完善,这些问题也得到了很大的改善。
1 需要在BIOS中设置开启与虚拟机相关的选项;
2 下载最新版本的虚拟机并安装增强功能;
Windows下系统设备驱动可以不装,无所谓的。
当然如果觉得在设备管理器中有问号不爽可以装一下。
上面步骤可以忽略!
需要在虚拟机中将USB设备启用,如下所示,没有看错,只是这样就可以了:
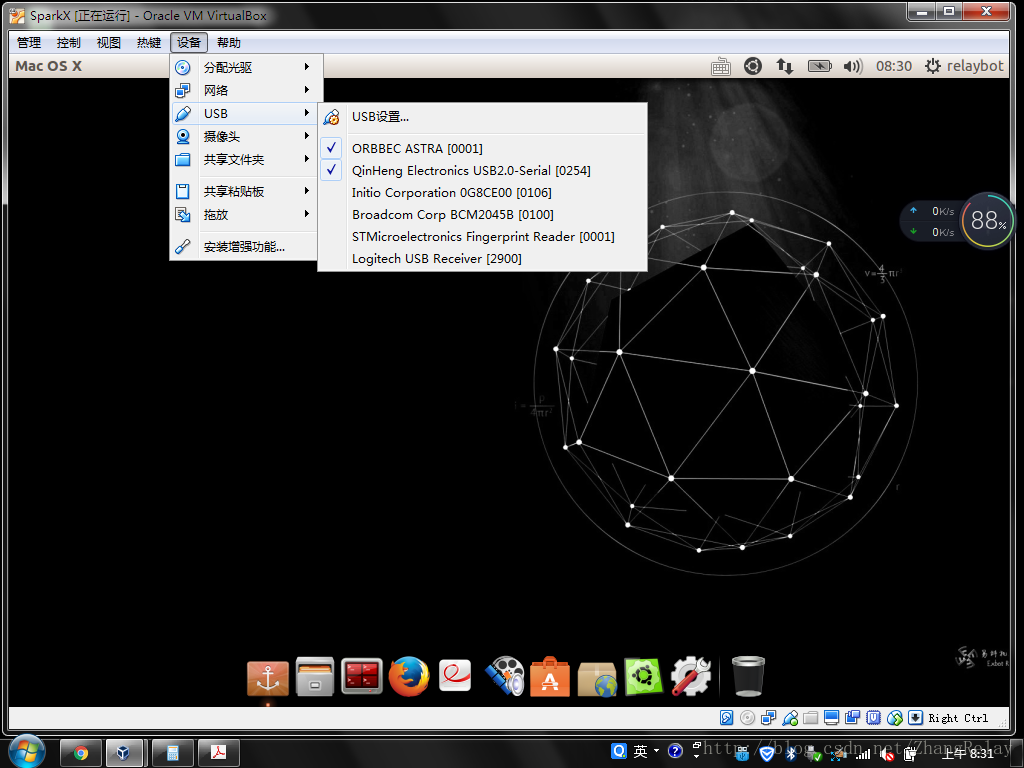
然后,就可以正常使用Spark了,现在虚拟机支持大部分外设,包括USB3.0设备,但是如果需要长期使用,推荐直接安装,虚拟机可作为入门学习用。
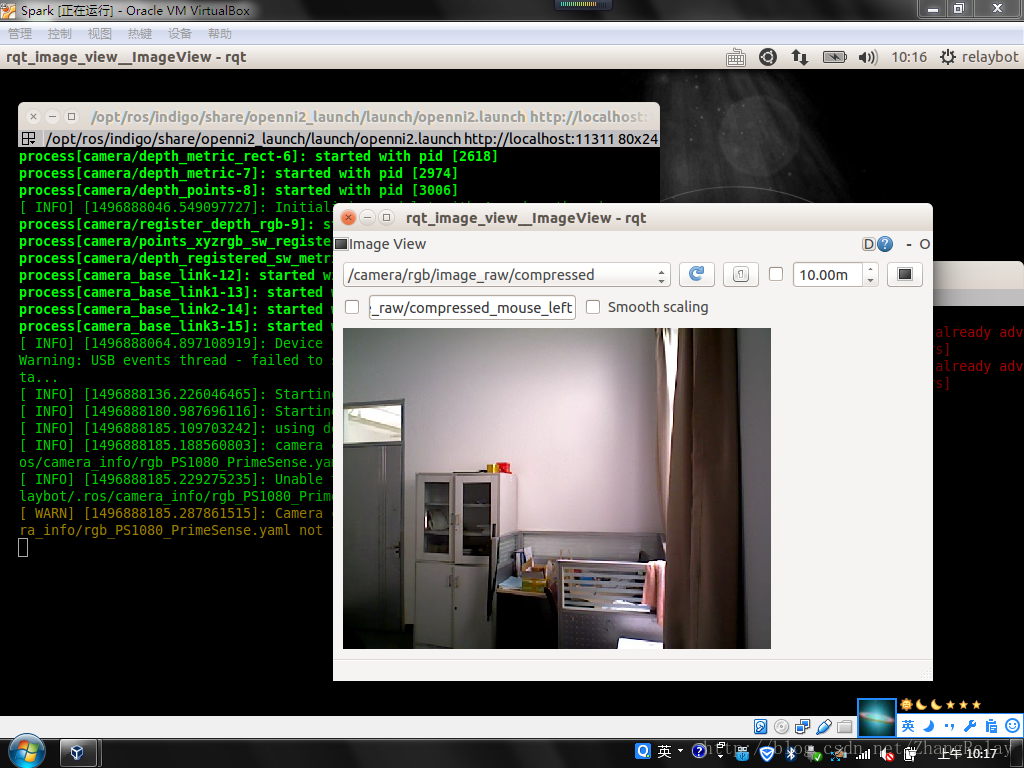
启动./follow_run.sh小应用后,一切正常,完美使用:
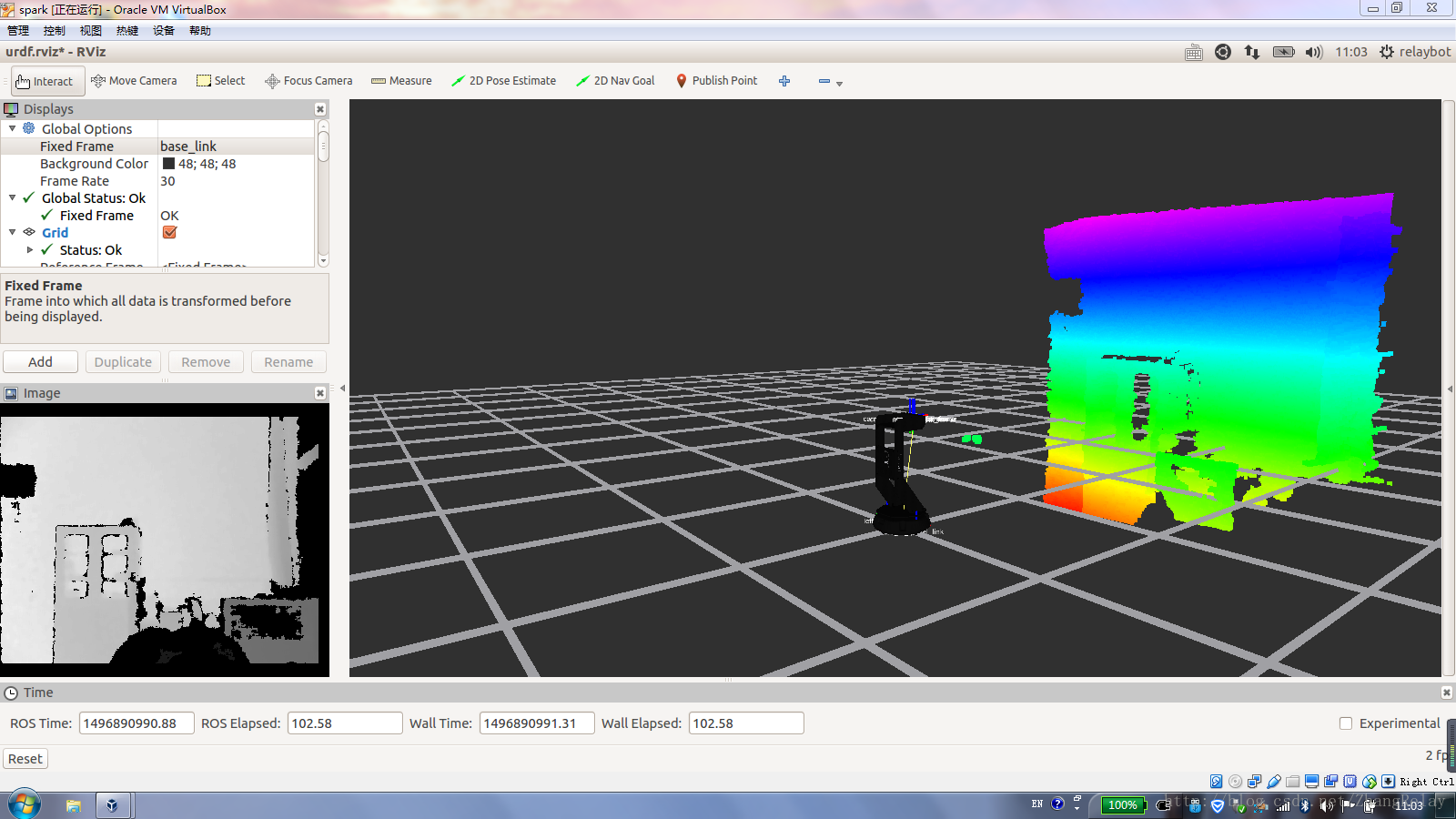

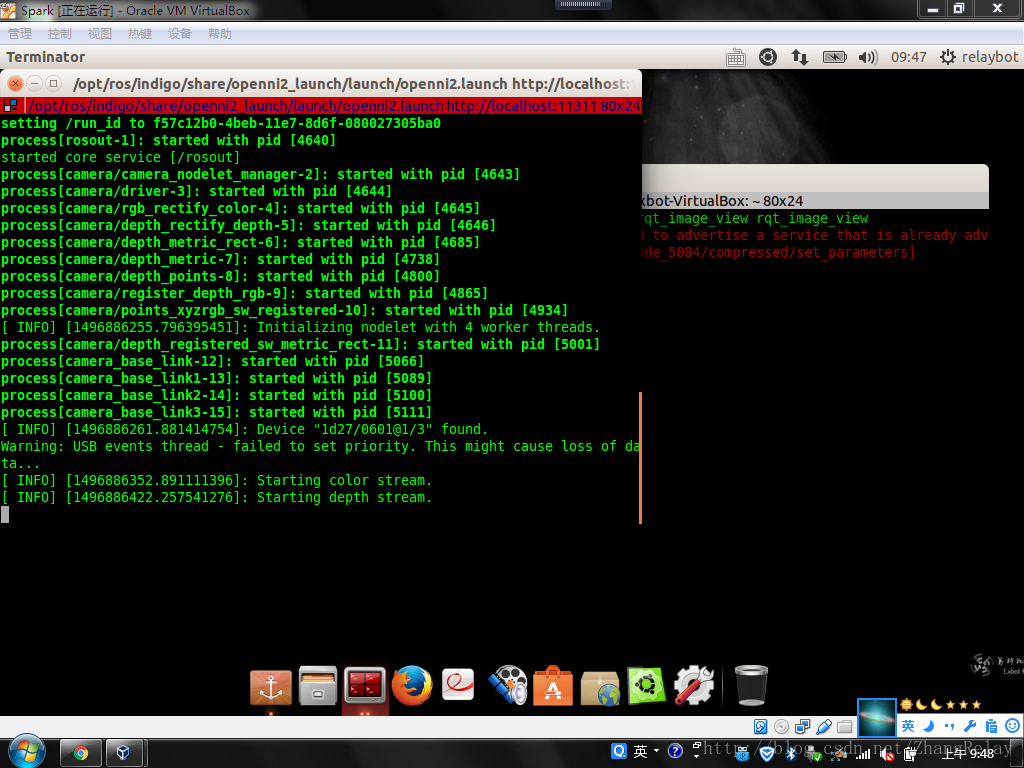
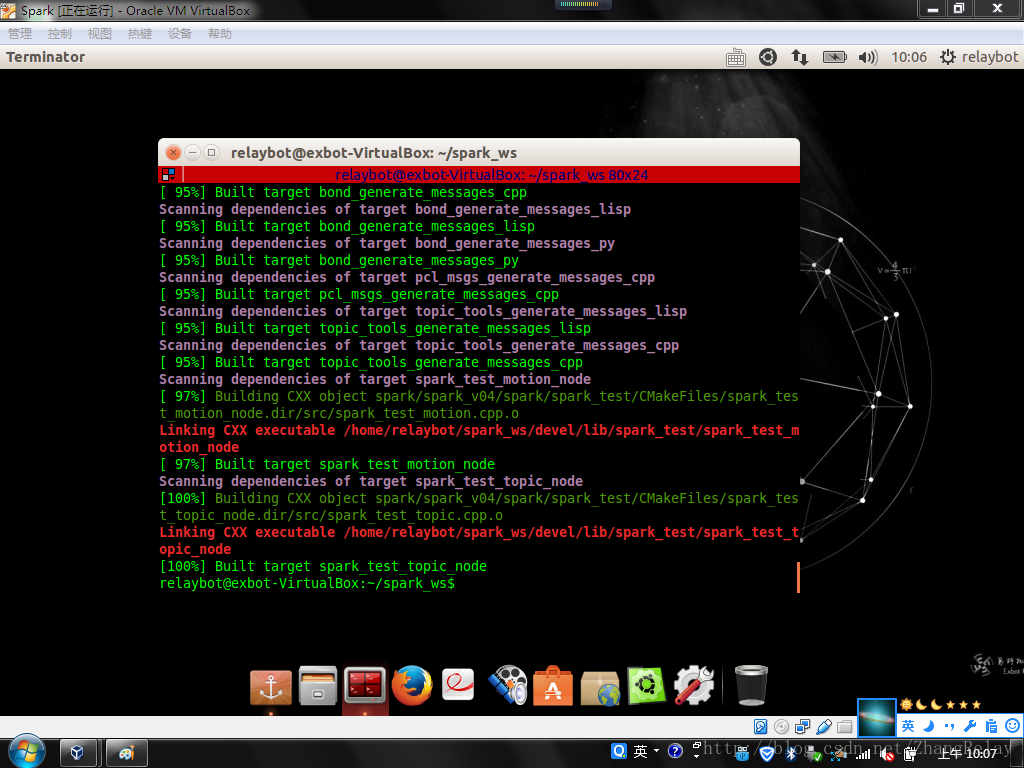
这样就可以在虚拟机中使用Spark,和直接安装一样进行使用和开发。
~End~
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/72911490

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)