ROS机器人项目开发11例-ROS Robotics Projects(4)物体检测与识别

【摘要】 ROS Robotics Projects(4)物体检测与识别
这是本书的第6章,包括使用单目和深度视觉,分别为2D和3D的检测和识别。
用到了一些Github上已有的库和功能包。
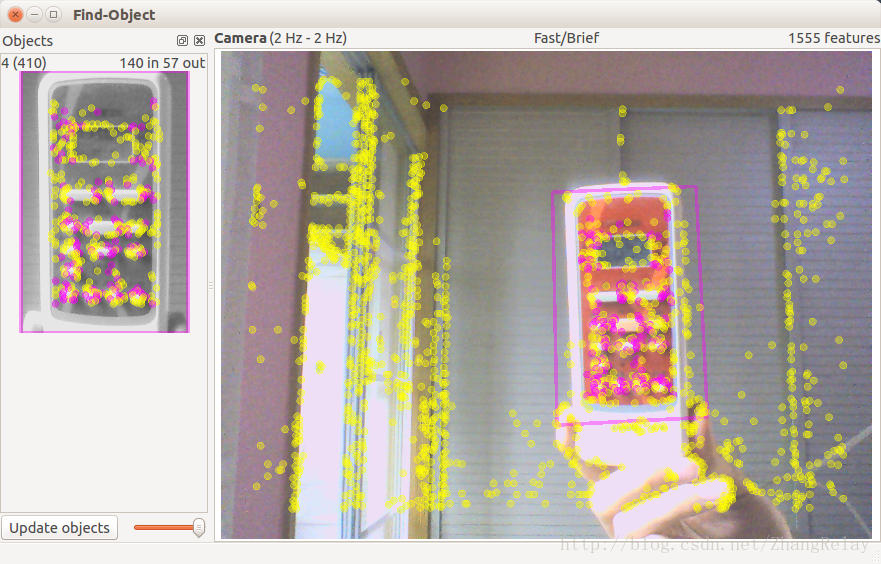
以find_object_2d为例(http://wiki.ros.org/find_object_2d):
补充参考:https://github.com/introlab/find...
ROS Robotics Projects(4)物体检测与识别
这是本书的第6章,包括使用单目和深度视觉,分别为2D和3D的检测和识别。
用到了一些Github上已有的库和功能包。
以find_object_2d为例(http://wiki.ros.org/find_object_2d):
补充参考:https://github.com/introlab/find-object
| find_object_2d.launch | 2 years ago | ||
| find_object_2d_gui.launch | 2 years ago | ||
| find_object_3d.launch | 2 years ago | ||
| find_object_3d_kinect2.launch | 2 years ago |
----
3D物体识别(https://github.com/wg-perception)
ROS包:
-
~$ sudo apt-get install ros-indigo-object-
-
ros-indigo-object-msgs
-
ros-indigo-object-msgs-tools
-
ros-indigo-object-recognition-capture
-
ros-indigo-object-recognition-core
-
ros-indigo-object-recognition-linemod
-
ros-indigo-object-recognition-msgs
-
ros-indigo-object-recognition-reconstruction
-
ros-indigo-object-recognition-renderer
-
ros-indigo-object-recognition-ros
-
ros-indigo-object-recognition-ros-visualization
-
ros-indigo-object-recognition-tabletop
-
ros-indigo-object-recognition-tod
-
ros-indigo-object-recognition-transparent-objects
----
两个重要的功能包: find_object_2d+object_recognition。
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/77248232

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)