ROS资讯(201801)

很多使用ROS的用户都在用Gazebo仿真,不过我个人感觉Virtual Robot Experimentation Platform(V-Rep)也非常不错的,如下:
有两个可用的网址:v-rep , coppeliarobotics 。
2018年Ubuntu将迎来新的长期支持发行版Ubuntu 18.04 LTS(预计4月份),同时ROS将发布新长期支持版本ROS Melodic Morenia(预计5月份),ROS2也会不断完善。
Gazebo 9即将发布。
----
Gazebo 9将于2018年1月25日发布2。它将是一个长期支持(LTS)版本,所以它将在2023年之前支持5年。它将在Ubuntu Xenial及更高版本以及OSX 10.11及更高版本上得到支持。
按照传统,Gazebo团队将对所有的预发布教程进行测试。我们想邀请社区加入我们来帮助审查教程。
官方教程聚会时间如下:
- 开始:太平洋标准时间1月23日下午5点
- 结束:太平洋标准时间1月25日上午11点
我们将通过Google电子表格进行协调,该电子表格中包含教程和审阅指南的链接。
在大多数时间,Gazebo Community 1还会有Open Robotics的工作人员出面回答问题,只是对该帖子发表评论以获得帮助和讨论。
另一种方法是只需安装Gazebo 9预发布版本1,让我们知道是否有任何内容被破坏或看起来很奇怪。
----
TIAGo ROS教程
----
没有必要有机器人开始开发应用程序!TIAGo和我们所有的机器人一样,都可以免费提供ROS模拟,并且愿意提高您的代码技能,甚至可以开始使用机器人。一套完整的基础,中级和高级教程适合那些想提高编程能力的人,也适合没有机器人知识的人。使用TIAGo轻松进入机器人!
以下是PAL Robotics为您提供的一些有用资源:
- TIAGo的官方ROS Wiki。
- 在ROS和Gazebo中设置TIAGo教程。

什么是MoveIt!
MoveIt!是一个易于使用的移动操作的ROS软件,汇集了运动规划,操纵,3D感知,运动学,控制和导航方面的最新进展。它已成为开发高级应用程序和测试机器人设计最广泛使用的平台之一。MoveIt!也是开源的,就像ROS一样。
如何使用MoveIt!在TIAGo上
使用MoveIt!是充分利用TIAGo技能的简单方法。在这里你可以找到一些详细的应用程序来开始运行MoveIt!在你的TIAGo模拟中:
- 在联合空间中进行规划:如何使用基于MoveIt!的运动规划达到给定的联合空间配置。TIAGo接头的躯干组可以被带到任何想要的关节空间配置,确保联合限制回避和自我碰撞。
- 在笛卡尔空间计划:使用MoveIt!计划末端执行器框架的联合轨迹以达到笛卡尔空间中的给定姿势。这个其他的 教程也可以使用TRAC-IK求解程序而不是KDL来运行。
- 与Octomap演示计划:使用Octomap在MoveIt!在姿势的运动规划期间计算与机器人周围的环境的碰撞检查。
- 拾取和放置演示:桌面拾取和放置演示,使用基于单元模型的对象重建,基于ArUco标记和MoveIt!中的拾取和放置管道。
----
ROS-Industrial Consortium - AP - 新加坡培训(1周后,注册仍未开放)
----
我们将在新加坡举办另一个培训课程,根据用户对导航的某些方面的要求,作为ROS-Industrial培训的一部分。
培训将于1月29日至2月2日在新加坡举行。
•第1天:Linux简介
•第2-4天:ROS基本培训(介绍;操作(UR);导航(turtlebot3将被使用))
•第5天:高级ROS主题(基于状态机的编程工具;构建,测试,发布工作流程和工具)
ROS-Industrial AP:5天课程[基本Linux,ROS-I,导航,工作流程]
----
TurtleBot3软件和固件更新和'waffle_pi'
----
宣布TurtleBot3是巨大的更新!
此更新考虑了用户的许多问题和要求。我们衷心感谢他们。
更多的兴趣会有更多的进展 如果您有任何问题或建议,请随时获得问题票6
更新列表
- turtlebot3_controller - 包含RC100(用于远程控制)库
- turtlebot3_diagnosis - 包含诊断功能
- turtlebot3_motor_driver - 包括DYNAMIXEL SDK
- turtlebot3_sensor - 包括IMU,电池,磁场和模拟输入功能
- / version_info - 包含硬件,固件和软件信息
- / battery_state - 包含电池电压和状态
- /磁场 - 包含磁场信息
- /诊断 - 包含自我诊断信息
- /声音 - 输出哔声
- / motor_power - 动态像素转矩开启/关闭
- /重置 - 重置里程并重新校准IMU
- 添加Sound.msg
- 简单的命令使USB设置
- 它显示IMU,电机,激光雷达,电池,按钮和版本信息的状态
- 添加奶蛋烘饼PI
- 现在,我们正在准备叫做Waffle PI的新版TurtleBot3 。在Rviz和Gazebo 3中找到奶蛋烘饼PI 。
如何更新
- 软件(v 1.0.0)
现有用户需要在turtlebot3和turtlebot3_msgs主分支下载新版本
直接在资料库turtlebot3下载1,turtlebot3_msgs 2
或使用命令行
$ cd〜/ catkin_ws / src
$ sudo rm -rf turtlebot3 /
$ git clone https://github.com/ROBOTIS-GIT/turtlebot3.git 1
$ cd〜/ catkin_ws / src
$ sudo rm -rf turtlebot3_msgs /
$ git clone https://github.com/ROBOTIS-GIT/turtlebot3_msgs.git 1
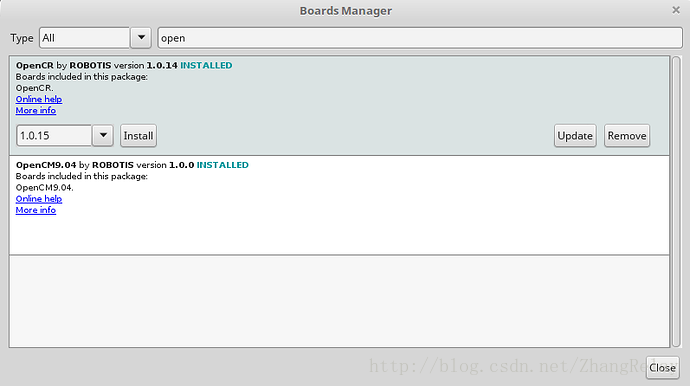
- 固件
打开Arduino - > Toos - > Board: - > Board Manager ... - > Update(v 1.0.15)
----
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/79151985

- 点赞
- 收藏
- 关注作者
评论(0)