【 Vivado 】输出延迟约束实例

Output Delay Constraints Instance
本节讲解一下output delay的实例。依旧是Ethernet PHY和FPGA的接口,框图如图1所示,其中TX接口,MII管理接口输出方向需要output delay约束。
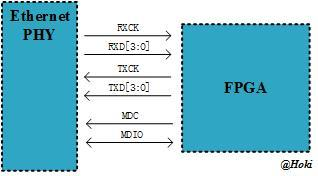
图1
- TX接口:
TX接口由时钟TXCK和数据TXD[3:0]组成,都是从FPGA输出,即时钟和数据同源,因此TX接口为源同步输出接口。
根据上节中output delay value的计算公式:
max_input_delay = Tbd_max + Tsetup - Tcd_min
min_input_delay = Tbd_min – Thold - Tcd_max
其中有4个时间参数:Tbd,Tcd,Tsetup和Thold,如图2所示。
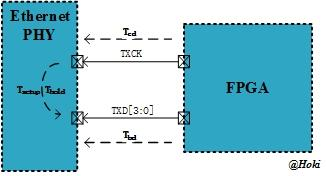
图2
Tcd和Tbd分别是时钟TXCK和数据TXD[3:0]在板上的延时。首先通过PCB设计软件计算得到它们布线长度:LTXCK=784mil,LTXD[3]=663mil,LTXD[2]=680mil,LTXD[1]=852mil,LTXD[0]=901mil,因此计算得到:
Tcd_max= Tcd_min=784mil*166ps/inch= 0.130144n
Tbd_max=901mil*166ps/inch= 0.149566ns
Tbd_min=663mil*166ps/inch=0.110058ns
Tsetup和Thold是PHY(DP83849ID)芯片的时间参数,如图3所示,查询datasheet得到:
参考时间参数T2.4.2,Tsetup=10ns
参考时间参数T2.4.3,Thold=0ns
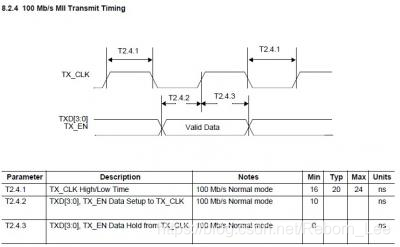
图3
综上可得到output delay value:
max_output_delay = Tbd_max + Tsetup - Tcd_min=0.149566ns
+ 10ns - 0.130144ns=10.019422ns
min_output_delay = Tbd_min – Thold - Tcd_max=0.110058ns
– 0ns - 0.130144ns=-0.020086ns
可能有些人会诧异,为什么min_output_delay的值会是负的?负的表示相对于输出是反方向的延时。
下面对TX接口的output delay进行约束:
create_clock -nameTXCK -period 40 -waveform {0 20} [get_ports {TXCK}]
create_clock -nameTXCK_PHY -period 40 -waveform {0 20}
set_output_delay –clock TXCK_PHY -max 10.019422 [get_ports {TXD[3] TXD[2] TXD[1] TXD[0]}]
set_output_delay –clock TXCK_PHY -min -0.020086ns [get_ports {TXD[3] TXD[2] TXD[1] TXD[0]}]
Vivado中约束如下图所示:

约束主时钟

约束虚拟时钟

约束min output delay

约束max output delay
- MII管理接口:
MII管理接口由时钟MDC和数据MDIO组成,其中MDIO为双向接口,因此需要对其进行input delay和output delay约束。在其output方向,MDC和MDIO都是从FPGA输出的,因此也是源同步输出接口。
时间参数的计算与TX接口类似,如图4所示
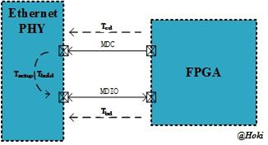
图4
其中MDC和MDIO在板上的布线长度分别为LMDC=924mil,LMDIO=587mil,可得:
Tcd_max= Tcd_min=924mil*166ps/inch= 0.153384ns
Tbd_max=Tbd_min=587mil*166ps/inch=0.097442ns
Tsetup和Thold的值参考datasheet,如图5所示,可得:
参考时间参数T2.3.2,Tsetup=10ns
参考时间参数T2.3.3,Thold=10ns

图5
综上可得到output delay value:
max_output_delay = Tbd_max + Tsetup - Tcd_min=0.153384ns + 10ns
- 0.097442ns=10.055942ns
min_output_delay = Tbd_min – Thold - Tcd_max=0.153384ns - 10ns - 0.097442ns=-9.944058ns
下面对MII管理接口的output delay进行约束:
create_clock -nameMDC -period 400 -waveform {0 200} [get_ports {MDC}]
create_clock -nameMDC_PHY -period 400 -waveform {0 200}
set_output_delay –clock MDC_PHY -max 10.055942 [get_ports {MDIO}]
set_output_delay –clock MDC_PHY -min -9.944058 [get_ports {MDIO}]
Vivado中约束如下图所示:

约束主时钟

约束虚拟时钟

约束max output delay

约束min output delay
文章来源: reborn.blog.csdn.net,作者:李锐博恩,版权归原作者所有,如需转载,请联系作者。
原文链接:reborn.blog.csdn.net/article/details/85308042

- 点赞
- 收藏
- 关注作者
评论(0)