Cozmo+Python+ROS+AI会产生什么样的奇妙反应呢?(玩Cozmo机器人,学Python编程,掌握ROS和AI技术)

Cozmo+Python+ROS+AI会产生什么样的奇妙反应呢?
(玩Cozmo机器人,学Python编程,掌握ROS和AI技术)

跟随绿色激光点运动?如何实现?

在黄色边缘线的赛道上行驶?如何实现?
这是一篇轻松愉快的博文,简单聊聊如何从玩机器人,升级为开发和设计机器人的工程师。
参考:http://www.theconstructsim.com/,如下:



关键词::涉及Anki Cozmo机器人/Python编程/ROS机器人操作系统/AI人工智能(TensorFlow)::
本文内容已经完成课程测试,将全部公开。
全部课程开发已经历经3年,不断改进与优化,并会持续更新哦(2016-2020)。

课程大纲链接:---- https://blog.csdn.net/ZhangRelay/article/details/83544323 ----
更多相关内容可查看个人其他博文,欢迎批评,请多指教,下面进入正文::
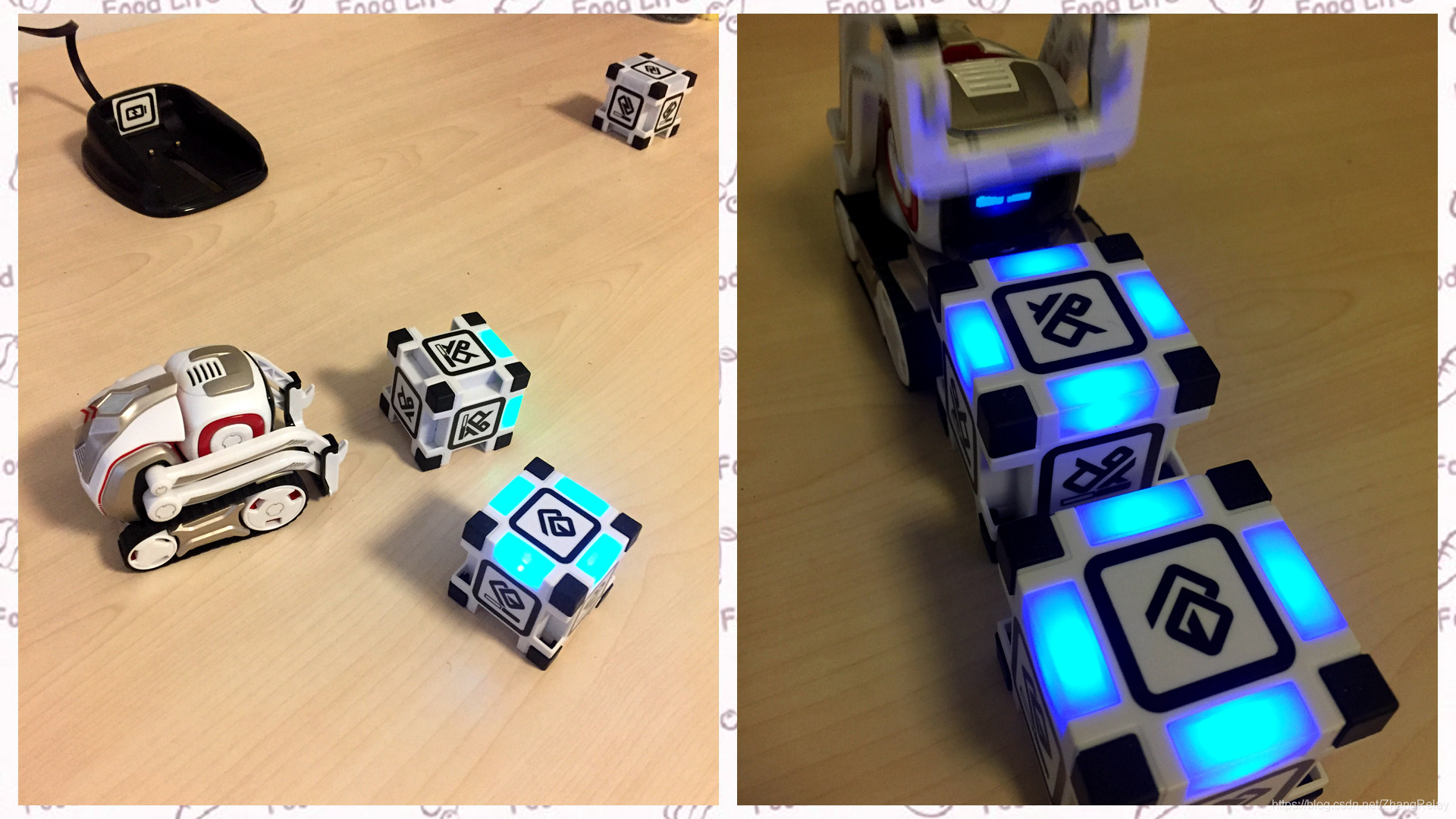
1 呆萌逗趣的Cozmo
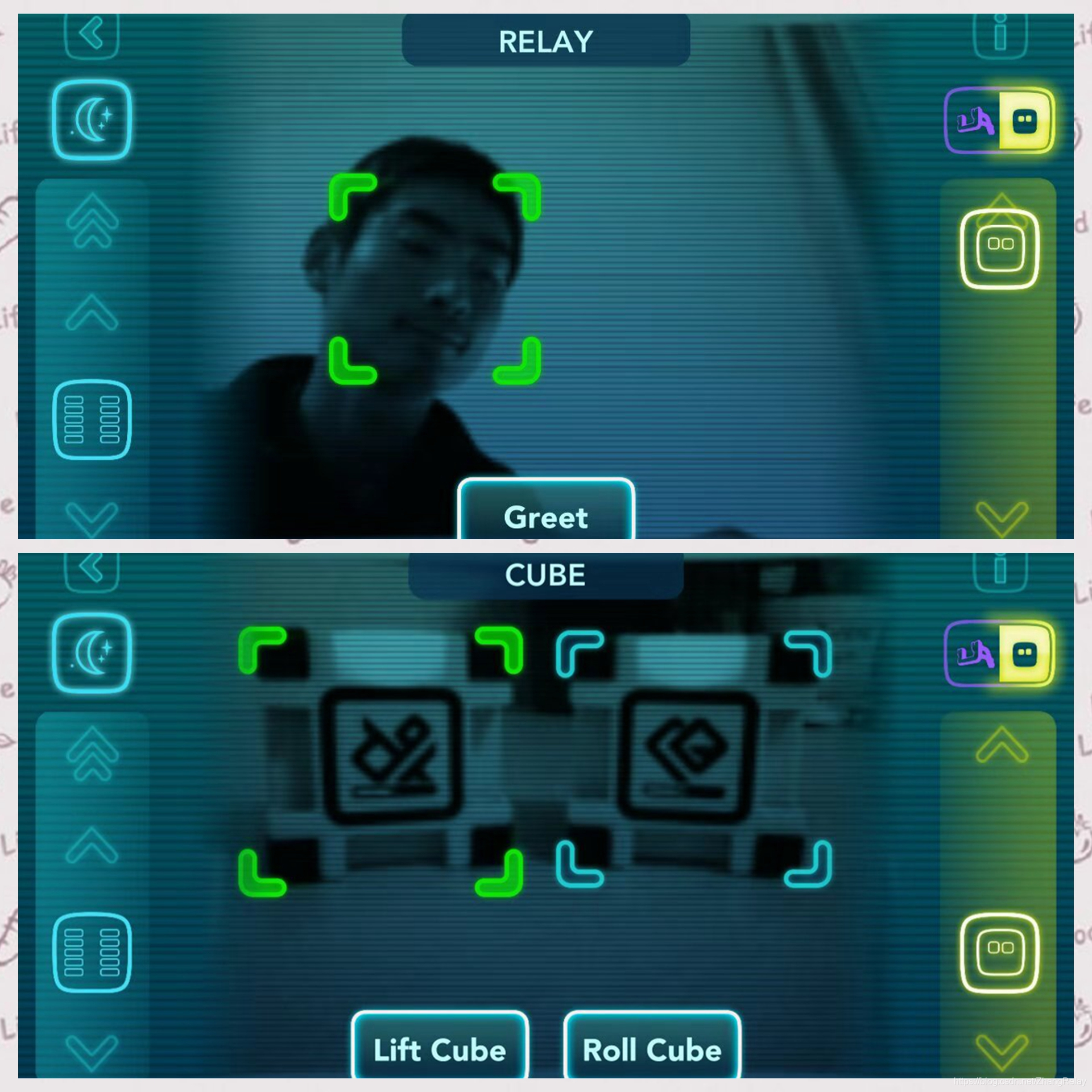
此部分具体教程侧重熟悉和通过平板使用Cozmo
这是一款2017年上市的人工智能玩具机器人,2018年新款换了酷炫一身黑改名为Vector,功能升级,外观完全一致,如下图:
 |
 |
有android和ios的APP,也有Windows/Linux/MacOS的开发SDK,并支持ROS indigo/kinetic/melodic,功能十分强大!
|
| Anki公司是由卡内基梅隆机器人研究所(Carnegie Mellon Robotics InsTItute)的三名毕业生于2010年创办的,现已获得了超过2亿美元的风险投资。Anki目前已经售出了150万台机器人,并且找到了他们认为是最容易打入家庭市场的道路——玩具(智能机器人系列)。这个明星产品是一个狂躁的小推土机机器人,名为Cozmo,它可以在桌面上行走,玩简单的游戏,它的顶部装有会亮的立方体。根据一项分析,如果按照收入计算的话,Cozmo是2017年美国、英国和法国的亚马逊网站上最畅销的玩具。 Vector是一个略大型的黑色版Cozmo,Cozmo的售价为180美元,Vector定价可能在250美元,并在2018年10月发货(现在Anki 以200美元的折扣价在Kickstarter上推出了该款机器人。)Vector先进的一点是提升了Cozmo难以做到的自主化程度。对于Cozmo来说,盒子里藏着一个连接Wi-Fi的智能手机,里面运行着一个控制机器人的应用程序。 |
各种软件和开发工具可以到官网对应处下载,也可以下载打包好的完整版:
https://download.csdn.net/download/zhangrelay/10765987
2 简单易学的Python编程
此部分具体教程侧重Linux环境配置和Python编程基础!
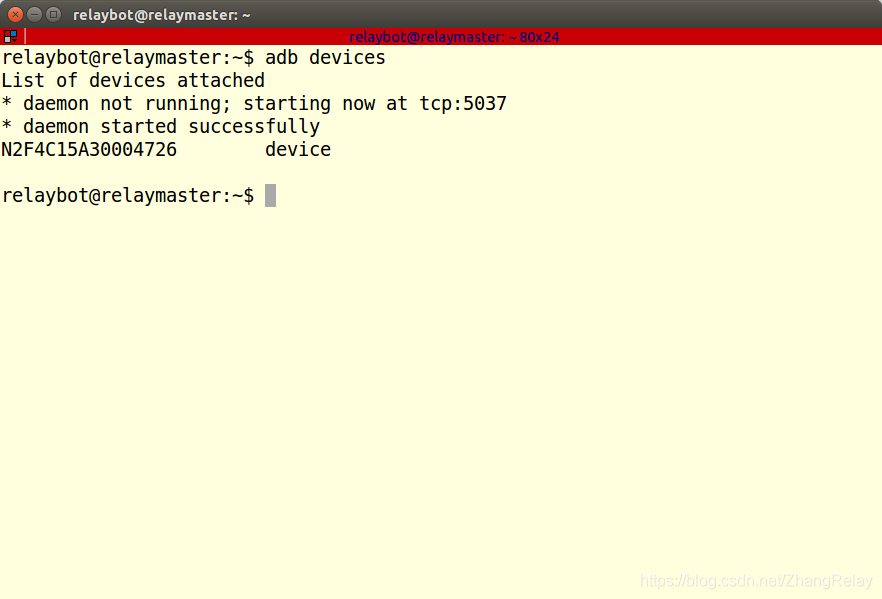
需要正确安装SDK才能使用此功能。确保手机或平板正确连接。
安卓手机:(adb)
苹果手机:(usbmuxd)
平板:(usbmuxd)
经过测试支持Ubuntu 14.04/16.04/18.04。详细安装内容参考(使用SDK):http://cozmosdk.anki.com/docs/
稍后也会在博客中补充并详细讲解。如果上述步骤一切顺利,就可以在电脑端运行Python代码控制Cozmo啦!!!
向机器人世界问好 Hello Robotics!
-
'''Hello World
-
-
Make Cozmo say 'Hello World' in this simple Cozmo SDK example program.
-
'''
-
-
import cozmo
-
-
-
def cozmo_program(robot: cozmo.robot.Robot):
-
robot.say_text("Hi Robotics").wait_for_completed()
-
-
-
cozmo.run_program(cozmo_program)
前进和转向 drive turn
-
'''Drive And Turn
-
-
Make Cozmo drive forwards and then turn 90 degrees to the left.
-
'''
-
-
import cozmo
-
from cozmo.util import degrees, distance_mm, speed_mmps
-
-
-
def cozmo_program(robot: cozmo.robot.Robot):
-
# Drive forwards for 150 millimeters at 50 millimeters-per-second.
-
robot.drive_straight(distance_mm(150), speed_mmps(50)).wait_for_completed()
-
-
# Turn 90 degrees to the left.
-
# Note: To turn to the right, just use a negative number.
-
robot.turn_in_place(degrees(90)).wait_for_completed()
-
-
-
cozmo.run_program(cozmo_program)
3 利用ROS,玩具秒变教具
此部分具体教程侧重使用ROS进行机器人控制
rviz::(Ubuntu 18.04 + ROS Melodic)
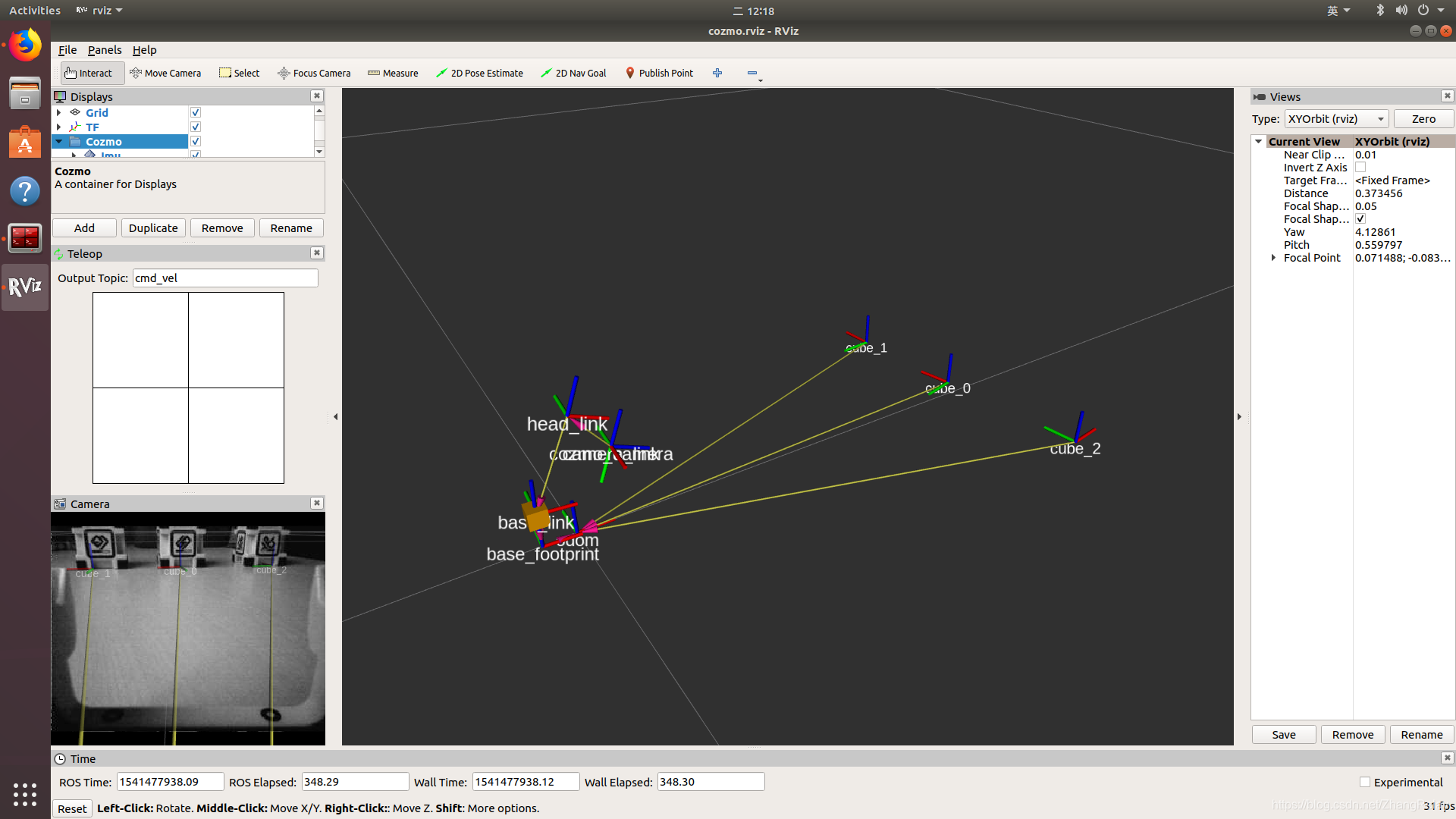
教程包括消息机制/TF2坐标变换/调试工具使用等,可见摄像头中3个方块(左下角),分别对应cube1,cube0,cube2,机器人自身坐标和方块都识别准确。我们换一个视角来看看!

方块改为三角形排列,rviz如下:

人类视角到机器人视角的完美变换!!!
4 让Cozmo更智能tensorflow
此部分具体教程侧重人工智能AI
具体参考:github(cozmo-tensorflow)::https://github.com/whatrocks/cozmo-tensorflow
 |
 |
-----补充资料----
Cozmo的功能是非常丰富的。
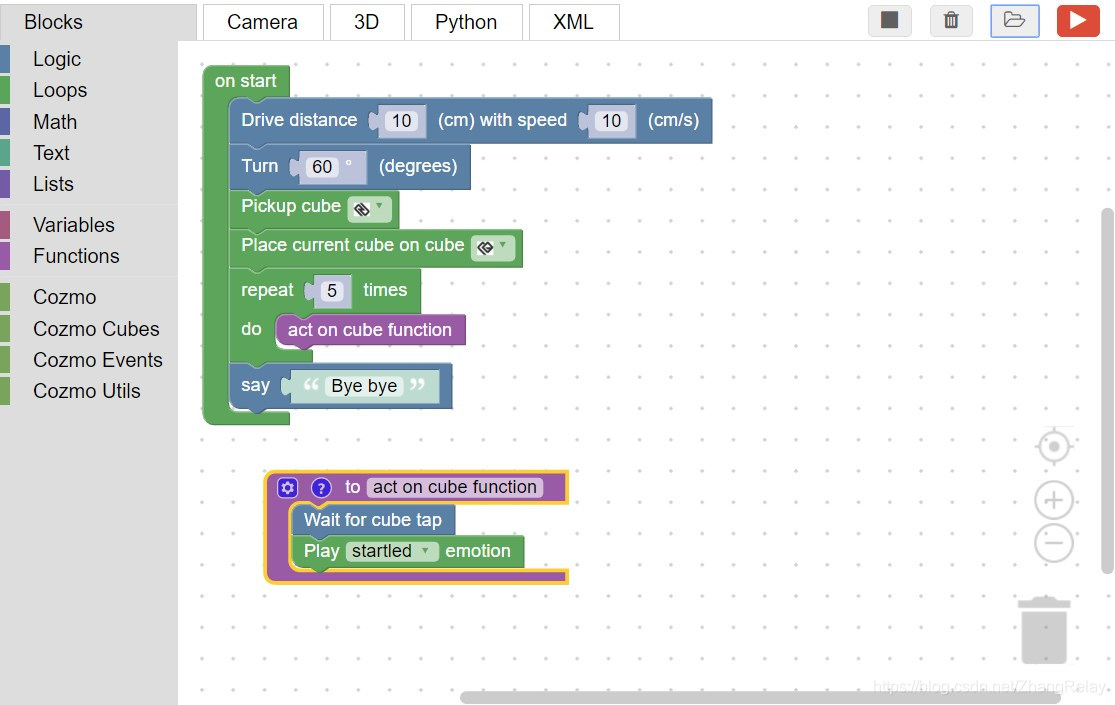
1. 支持Scartch这个和手机APP功能重复了(Blockly)。
https://github.com/maxosprojects/cozmo-blockly
2. 语音控制:
https://github.com/rizal72/Cozmo-Voice-Commands
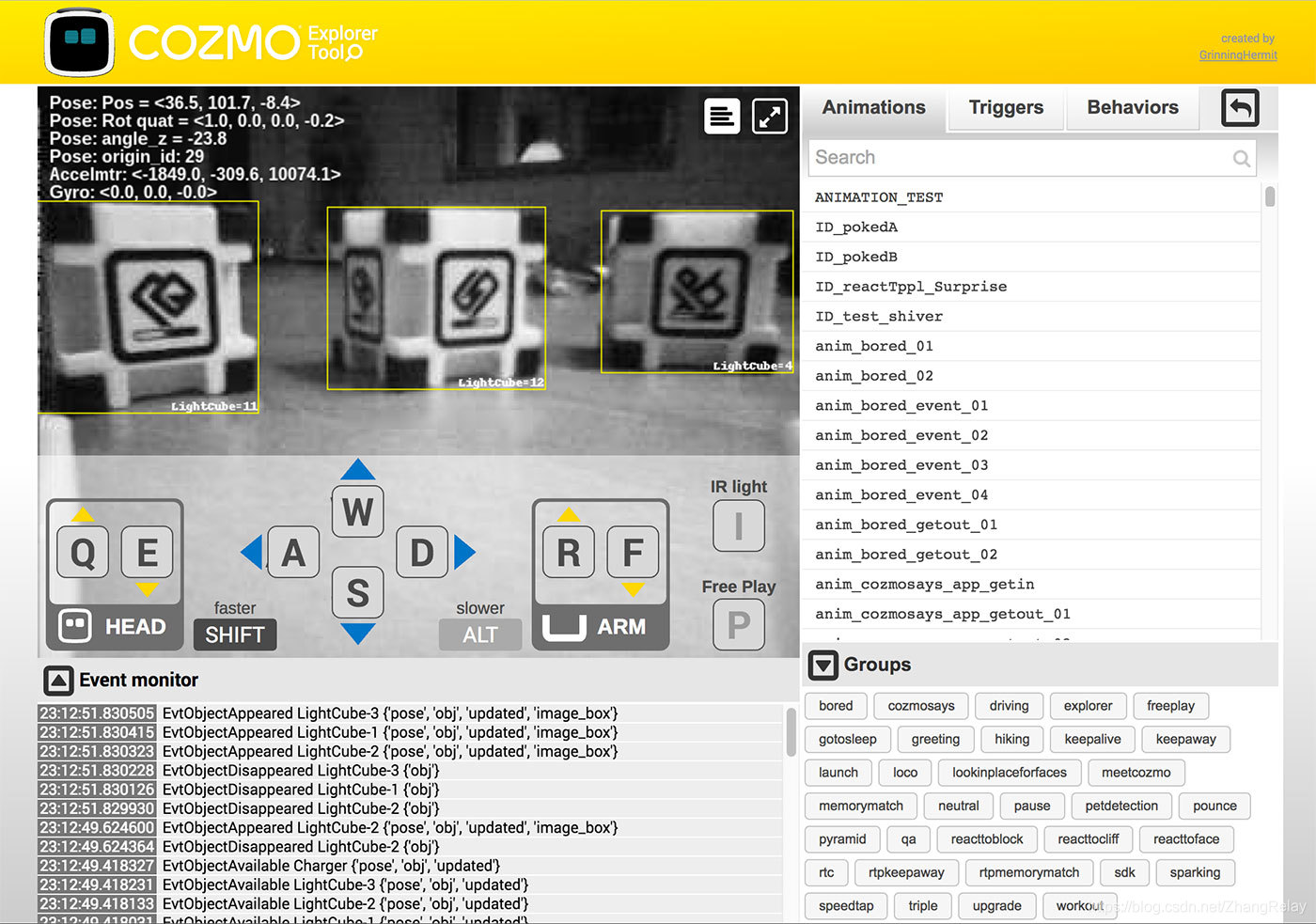
3. Cozmo浏览工具:
https://github.com/GrinningHermit/Cozmo-Explorer-Tool
4. 完全版教程
欢迎来到Cozmopedia维基!
Cozmopedia是卡内基梅隆大学David S. Touretzky教授的一个课程项目。
Cozmopedia与Anki没有任何关联或授权。Anki的官方Cozmo网站包括邂逅Cozmo,Cozmo SDK和Cozmo SDK论坛。
对于为初学者设计的Cozmo编程完全不同的方法,请在https://Calypso.software上尝试Calypso。

教学资源
机器人技术的十大理念 ; 大学课程 ; K-12和Anki的大学论坛
Cozmo硬件和SDK概念
adb(Android Debug Bridge)、Fire tablet 、 摄像头 、 充电器 、 颜色和灯光 、 轻巧立方体
cozmo-tools系列
在cozmo-tools GitHub库中。
simple_cli工具 ; world_viewer工具 ; event_monitor工具 ; genfsm工具
粒子滤波(Particle filter)
有限状态机
关键类:StateNode,Transition,Event, StateMachineProgram
OpenCV视觉
图像
语音控制
多机器人操作
其他资源
Cozmo编程框架(ROS,Scratch等)
数学基础
-----
Fin
-----
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/83789116

- 点赞
- 收藏
- 关注作者
评论(0)