ROS之MoveIt!运动规划框架

结合运动规划,操纵,3D感知,运动学,控制和导航方面的最新进展
海报如下 入门
最新消息:Melodic / Ubuntu 18.04
版本:0.10.0

-
运动规划
- 在杂乱的环境中生成高度自由的轨迹,避免局部最小化
-
操纵
- 通过掌握生成来分析您的环境并与之互动
-
反向运动学
- 解决特定姿势的关节位置,即使在过度致动的手臂中也是如此
-
控制
- 通过通用接口向低级硬件控制器执行时间参数化的关节轨迹
-
3D感知
- 使用Octomaps连接到深度传感器和点云
-
碰撞检查
使用几何图元,网格或点云数据避开障碍物
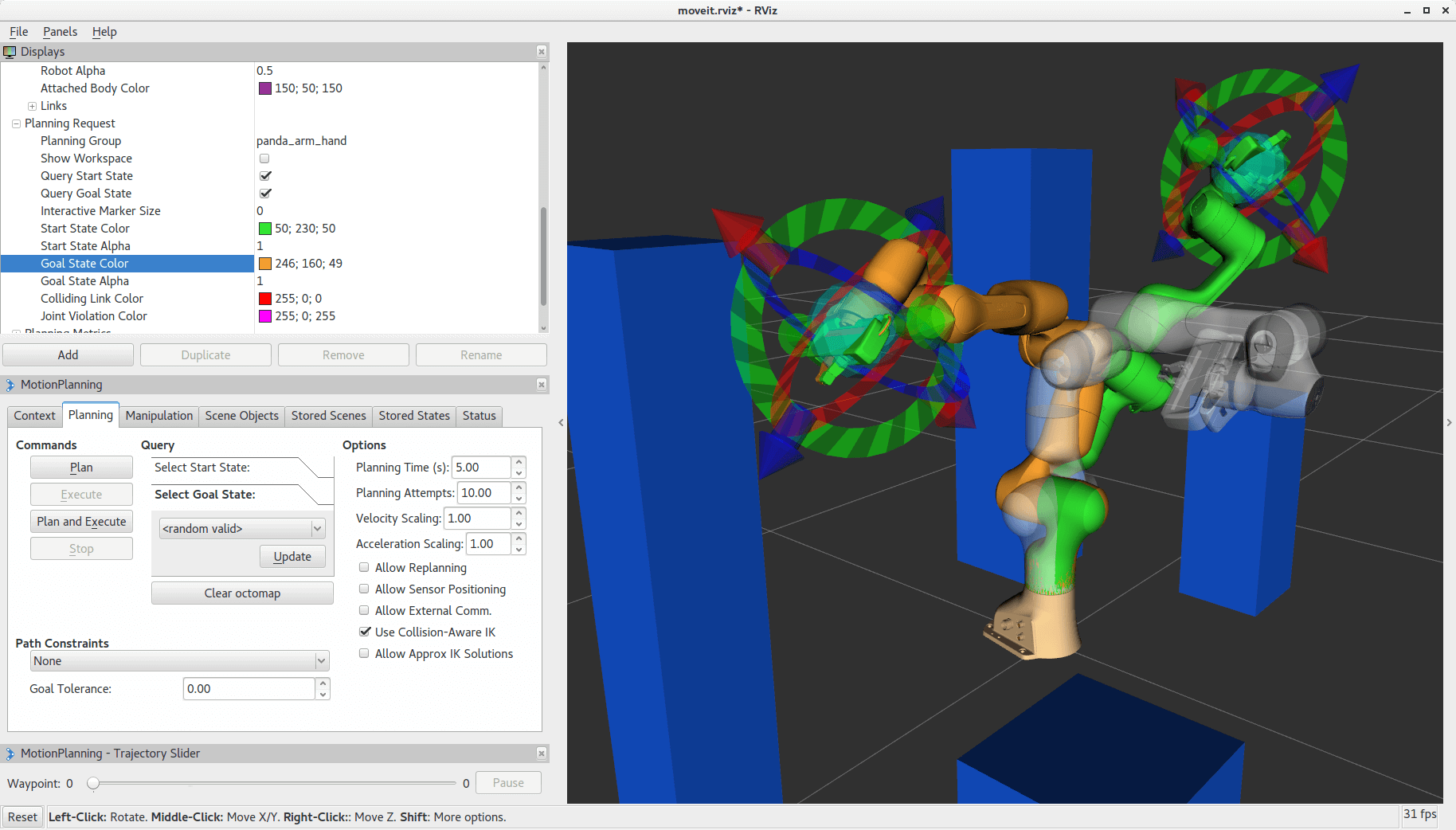
Rviz运动规划插件
开箱即用的视觉演示允许新用户围绕障碍物进行各种规划算法的交互式实验。然后只需点击一下即可在物理硬件上执行。
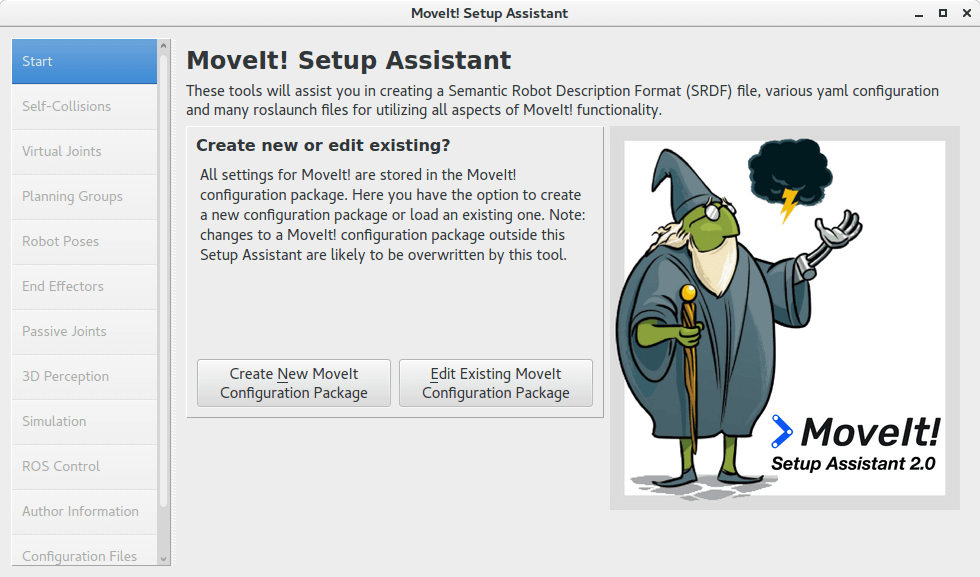
MoveIt!设置助手
快速设置任何机器人与MoveIt一起使用!使用逐步配置向导,或使用流行的预配置设置。还包括Gazebo和ROS Control的配置!
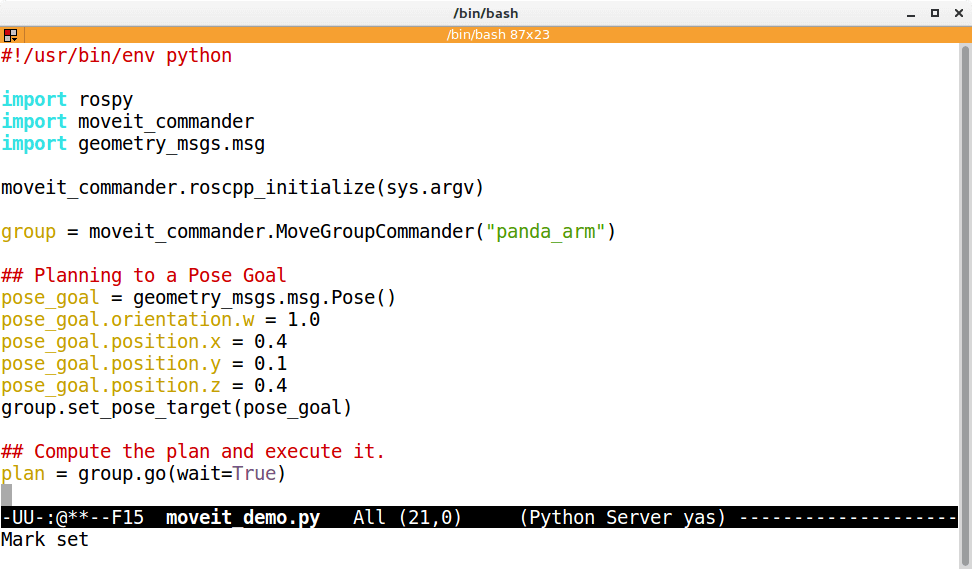
Python脚本和解释器
使用高级Python脚本来协调复杂的运动规划,在后台利用高性能C++库。或者直接使用C++接口。
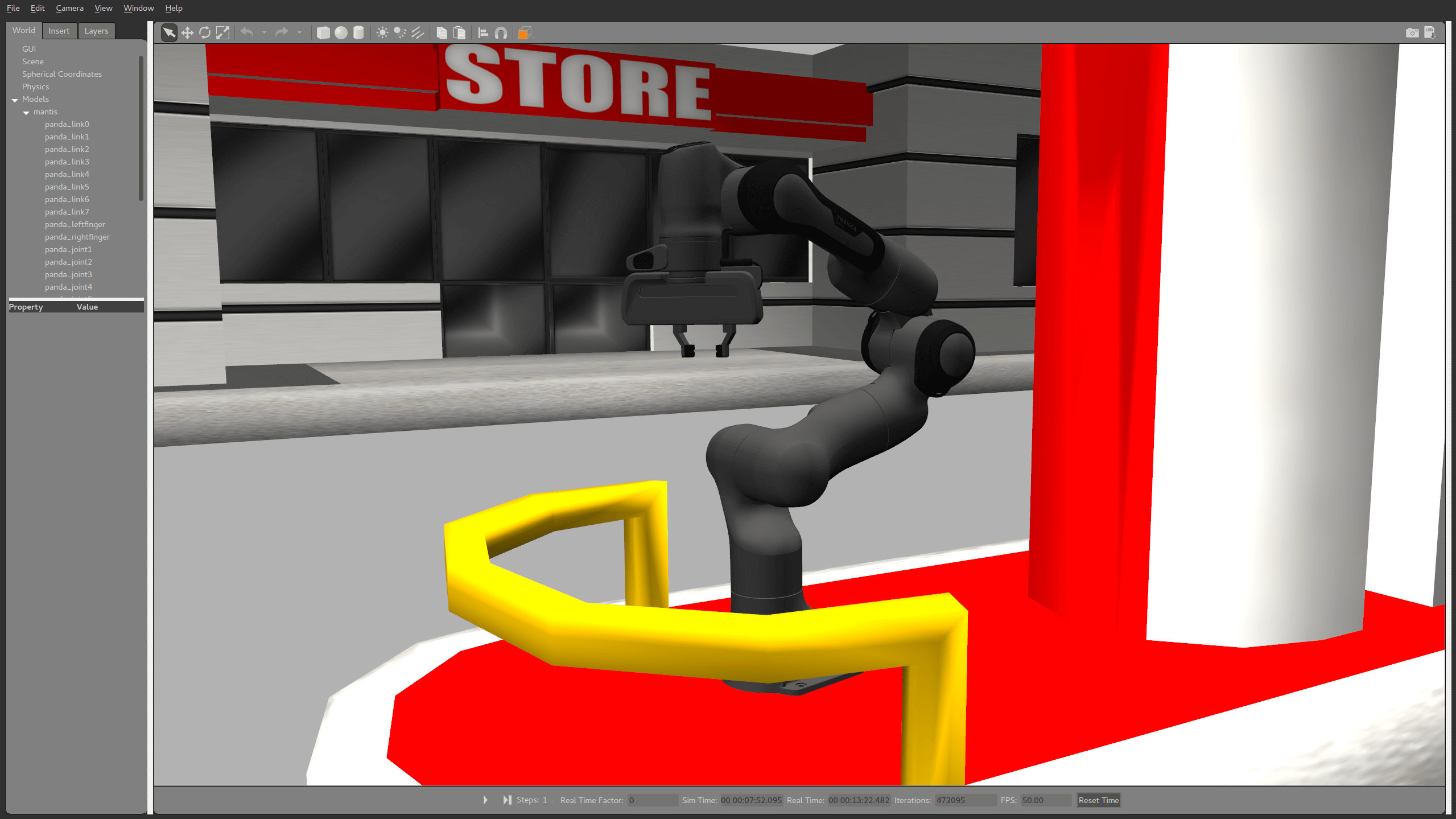
Gazebo模拟仿真平台
通过MoveIt!利用完整的基于物理的模拟器,加快开发和测试周期。结合Gazebo,ROS控制和MoveIt!用于强大的机器人开发平台。
为什么选择MoveIt!???
MoveIt!是最先进的移动操作软件,融合了运动规划,操控,3D感知,运动学,控制和导航方面的最新进展。它提供了一个易于使用的平台,用于开发先进的机器人应用,评估新的机器人设计,以及为工业,商业,研发和其他领域构建集成机器人产品。
MoveIt!是最广泛使用的开源操作软件,已被用于100多个机器人。请参阅机器人页面,查看MoveIt的一些机器人列表!正在使用。
当前和未来版本
Melodic LTS
2018年5月23日
MoveIt!2.0
寻求资金
平台: Ubuntu 18.04
发布日期:待定
寿命结束:待定
发行说明
PickNik正在积极寻求资金,以开发ROS2生态系统中的这一关键组件。
Melodic LTS
推荐的
平台: Ubuntu 17.10,18.04
发布日期: 2018年5月23日
寿命结束: 2023年5月
发行说明
这个LTS建立在最新版本的ROS1上,也可以在Ubuntu 16.04上构建。建议使用此LTS,但它仍在开发中,并且接受了更改API更改。
Kinetic LTS
保持
平台: Ubuntu 15.10,16.04
发布日期: 2016年5月23日
寿命结束:待定
发行说明
这个LTS仍然有所改进,但我们鼓励Melodic版本的所有开发。API应该是稳定的,但不是ABI。
Indigo LTS
保持
平台: Ubuntu 14.04
发布日期: 2014年7月22日
寿命结束: 2019年4月
发行说明
某些用户仍然使用此LTS,但只接受重要的错误修复。API很稳定。
安装
DOCS
关于
帮助
博客
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/84135902

- 点赞
- 收藏
- 关注作者
评论(0)