Ubuntu安装ROS和Gazebo之发行版对应关系(Ubuntu ROS Gazebo Distribution)

Ubuntu安装ROS之发行版对应关系(2018 LTS)
Ubuntu发行版:
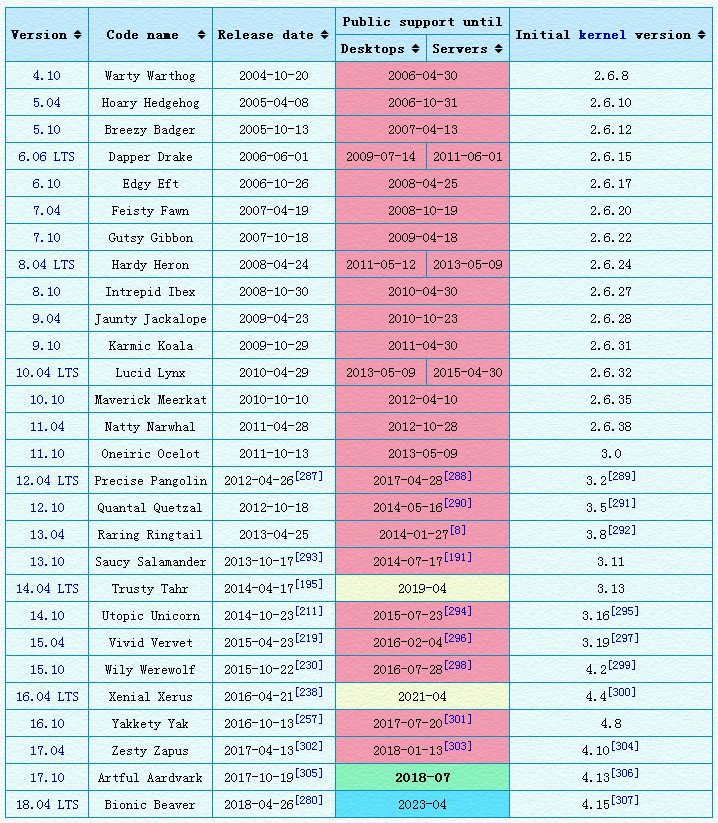
https://en.wikipedia.org/wiki/Linux_distribution

https://www.ubuntu.com/info/release-end-of-life
ROS发行版:
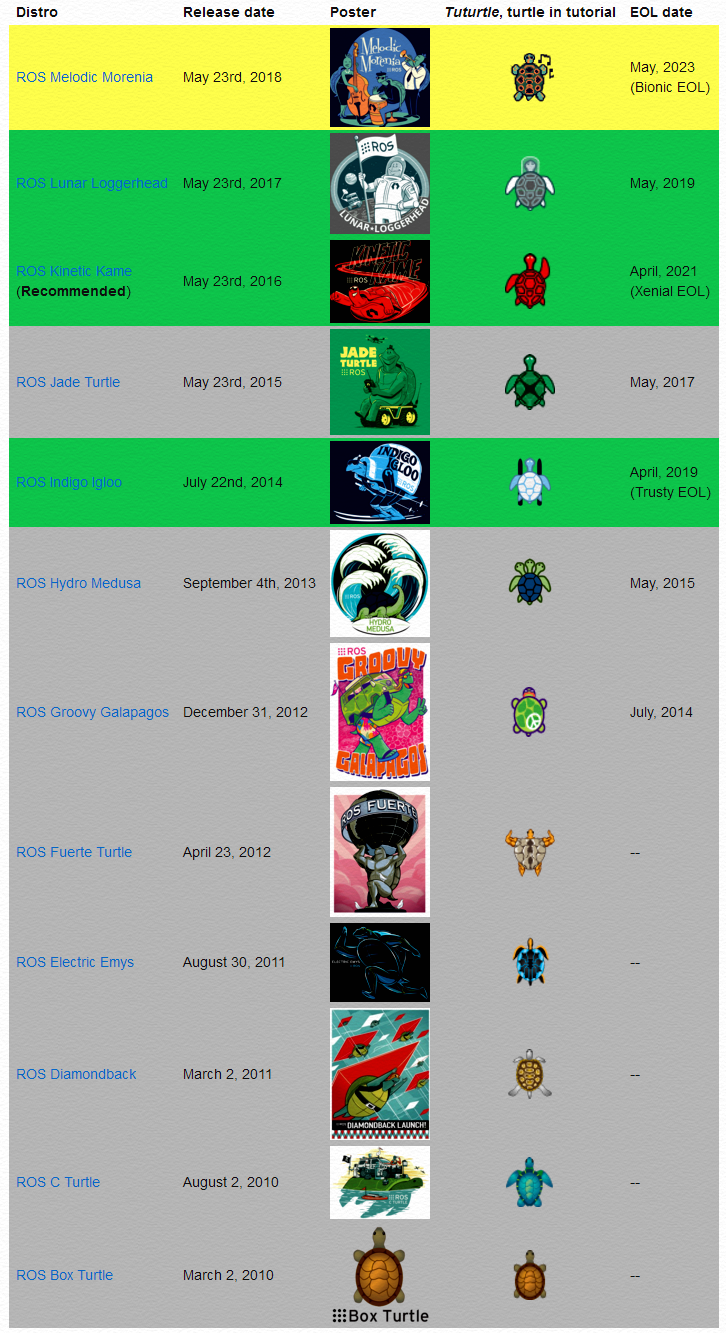
http://wiki.ros.org/Distributions
这里,我们还是需要重点推荐长期支持版本(LTS),当然不同版本的ROS对应Gazebo版本也不同哦。
链接:-ROS Melodic Morenia- -ROS Kinetic Kame - -ROS Indigo Igloo-
我们先看官网一段话(以Kinetic 为例):
ROS Kinetic ONLY supports Wily (Ubuntu 15.10), Xenial (Ubuntu 16.04) and Jessie (Debian 8) for debian packages. 摘自:http://wiki.ros.org/kinetic/Installation/Ubuntu
如果有对应中文版本wiki的安装介绍,请注意网址:http://wiki.ros.org/cn/kinetic/Installation/Ubuntu
虽然可以在15.10和16.04上都安装ROS Kinetic,但是这里只推荐在长期支持版本的Ubuntu安装长期支持版本的ROS。
Gazebo: http://www.gazebosim.org
Gazebo 1.9 2013-07-24EOL 2015-07-27
Gazebo 2.2 2013-11-07EOL 2016-01-25
Gazebo 3.0 2014-04-11EOL 2015-07-27
Gazebo 4.0 2014-07-28EOL 2016-01-25
Gazebo 5.0 2015-01-26EOL 2017-01-25
Gazebo 6.0 2015-07-27EOL 2017-01-25
Gazebo 7.1 2016-01-25EOL 2021-01-25
Gazebo 8.2 2017-12-10EOL 2019-01-25
Gazebo 9.0 2018-01-25EOL 2023-01-25
Gazebo 10.0 2019-01-24EOL 2021-01-24
- Physics abstraction through Ignition Physics
- Rendering abstraction, with OGRE and Optix, through Ignition Rendering
- Plugin-based graphical user interface through Ignition GUI
- Data logging in Ignition Transport
- Support for encryption in Ignition Transport
- First version of the new Ignition Gazebo
- SDF C++ model
- Scripting interfaces
- Support for FBX meshes
- Update to Cloudsim and simulation asset hosting
Gazebo 11.0 2020-01-29
所以,给出对应版本的推荐(LTS)(各种小动物对应各种小乌龟):
Ubuntu 14.04 Trusty Tahr - ROS Indigo Igloo - Gazebo 2.X 2014-2019
Ubuntu 16.04 Xenial Xerus - ROS Kinetic Kame - Gazebo 7.X 2016-2021
Ubuntu 18.04 Bionic Beaver - ROS Melodic Morenia - Gazebo 9.X 2018-2023
 +
+  +
+ 
如上只是默认配置,通过源码编译可适用更多版本。
参考链接:
1. Ubuntu:https://en.wikipedia.org/wiki/Ubuntu_version_history
2. ROS:http://wiki.ros.org/Distributions
3. Gazebo:http://gazebosim.org/tutorials?tut=ros_wrapper_versions&cat=connect_ros
推荐一本免费中英书(对照快速掌握ROS词汇):https://blog.csdn.net/zhangrelay/article/details/79302460
网上免费实验课程:https://www.shiyanlou.com/courses/854
ETH的ROS课程资料:https://blog.csdn.net/zhangrelay/article/details/69382096
备份或启动镜像示例:https://blog.csdn.net/ZhangRelay/article/details/54632130
~End~
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/79982187

- 点赞
- 收藏
- 关注作者
评论(0)