ROS 2 Crystal Clemmys版机器人操作系统补充说明

古月大神更新ROS2的相关教程,推荐推荐。
之前,ROS 2 Crystal Clemmys版机器人操作系统安装说明链接如下:
https://blog.csdn.net/ZhangRelay/article/details/85019662
ROS2Go全面支持ROS 1 Melodic和ROS 2 Crystal,并配套对应教程:-)---:-)
口袋机器人Cozmo/Vector,空中机器人Tello,Python,C++以及ROS1和ROS2教程开发完成。
很多小伙伴会有困惑,现在如何选择ROS1和ROS2?如何多快好省的飞速入门ROS这款机器人开发工具?
This 14th of December of 2018, ROS2 Crystal Clemmys was released officially. It’s a very important step due to the fact that it adds enough new functionality versus its prior older brother ROS2 Bouncy Bolson to be a real option to consider to make the jump from ROS1 to ROS2.
So here are some of my findings and facts about ROS2 versus ROS1. Just bear in mind that crystal is evolving really fast and it wouldn’t be a surprise that more improvements appear in the near future.
2018年12月14日,ROS2 Crystal Clemmys正式发布。这是一个非常重要的节点,因为它增加了足够的新功能,而不是之前的ROS2 Bouncy Bolson,ROS2 Crystal Clemmys是一个真正的选择,可以考虑从ROS1跳转到ROS2。
所以这里有一些关于ROS2与ROS1的研究结果和事实。请记住,ROS2 Crystal Clemmys的发展速度非常快,在不久的将来会出现更多改进并不奇怪。
更多内容参考如下链接:
www.theconstructsim.com/ros2-vs-ros1/
当然,ros1和ros2都有官方版本的Official Docker Images,更多内容参考OSRF项目官方映像的Dockerfiles,包括Docker Hub上的存储库:
github.com/osrf/docker_images
对比学习,对于充分掌握ROS非常重要!
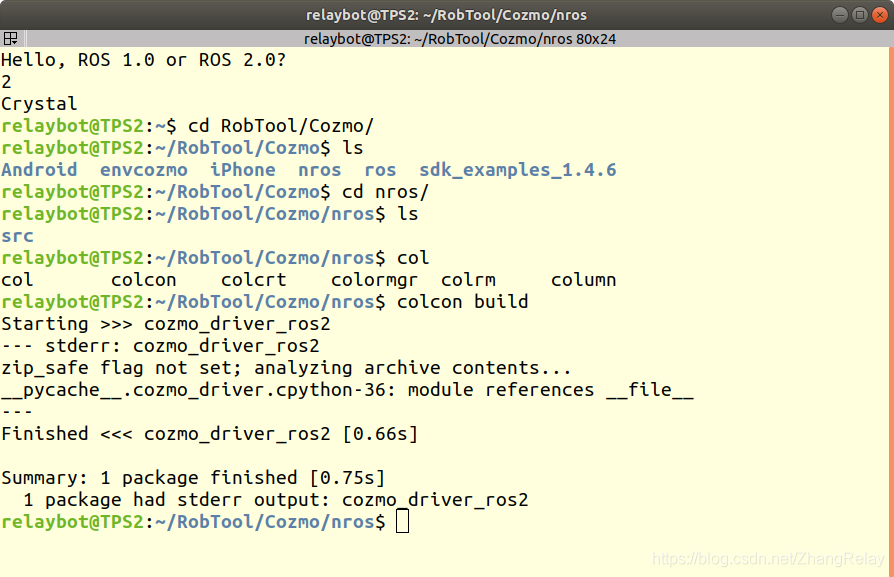
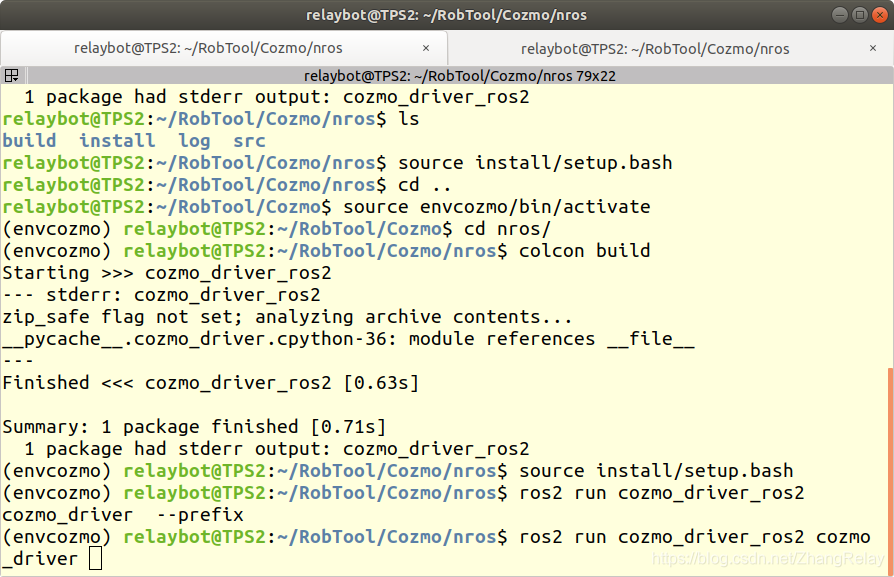
如rosrun和ros2 run???
-
relaybot@TPS2:~/RobTool/Cozmo/nros$ ros2 -h
-
usage: ros2 [-h] Call `ros2 <command> -h` for more detailed usage. ...
-
-
ros2 is an extensible command-line tool for ROS 2.
-
-
optional arguments:
-
-h, --help show this help message and exit
-
-
Commands:
-
daemon Various daemon related sub-commands
-
launch Run a launch file
-
lifecycle Various lifecycle related sub-commands
-
msg Various msg related sub-commands
-
multicast Various multicast related sub-commands
-
node Various node related sub-commands
-
param Various param related sub-commands
-
pkg Various package related sub-commands
-
run Run a package specific executable
-
security Various security related sub-commands
-
service Various service related sub-commands
-
srv Various srv related sub-commands
-
topic Various topic related sub-commands
-
-
Call `ros2 <command> -h` for more detailed usage.
Melodic-ros1(rviz1):
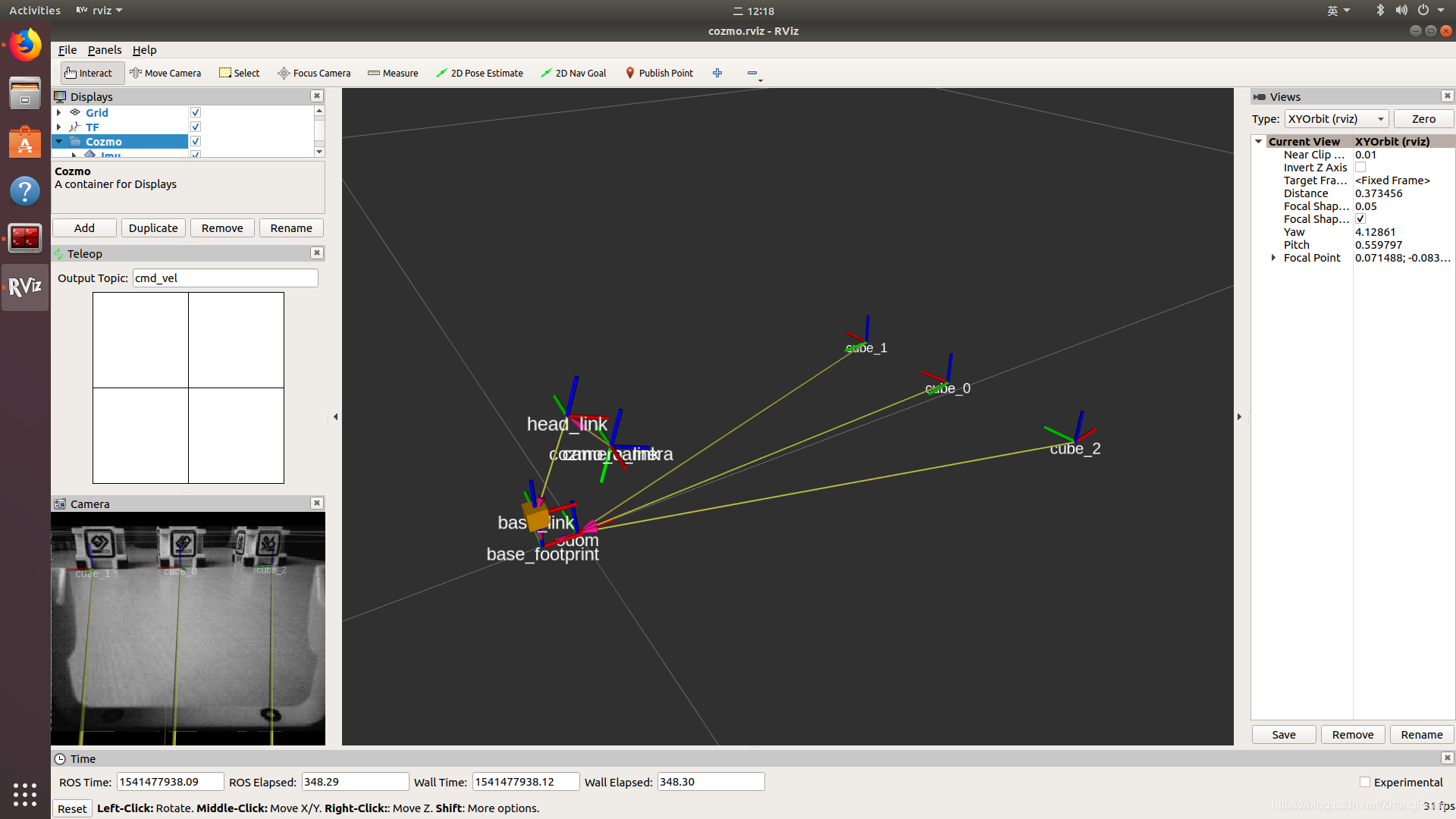
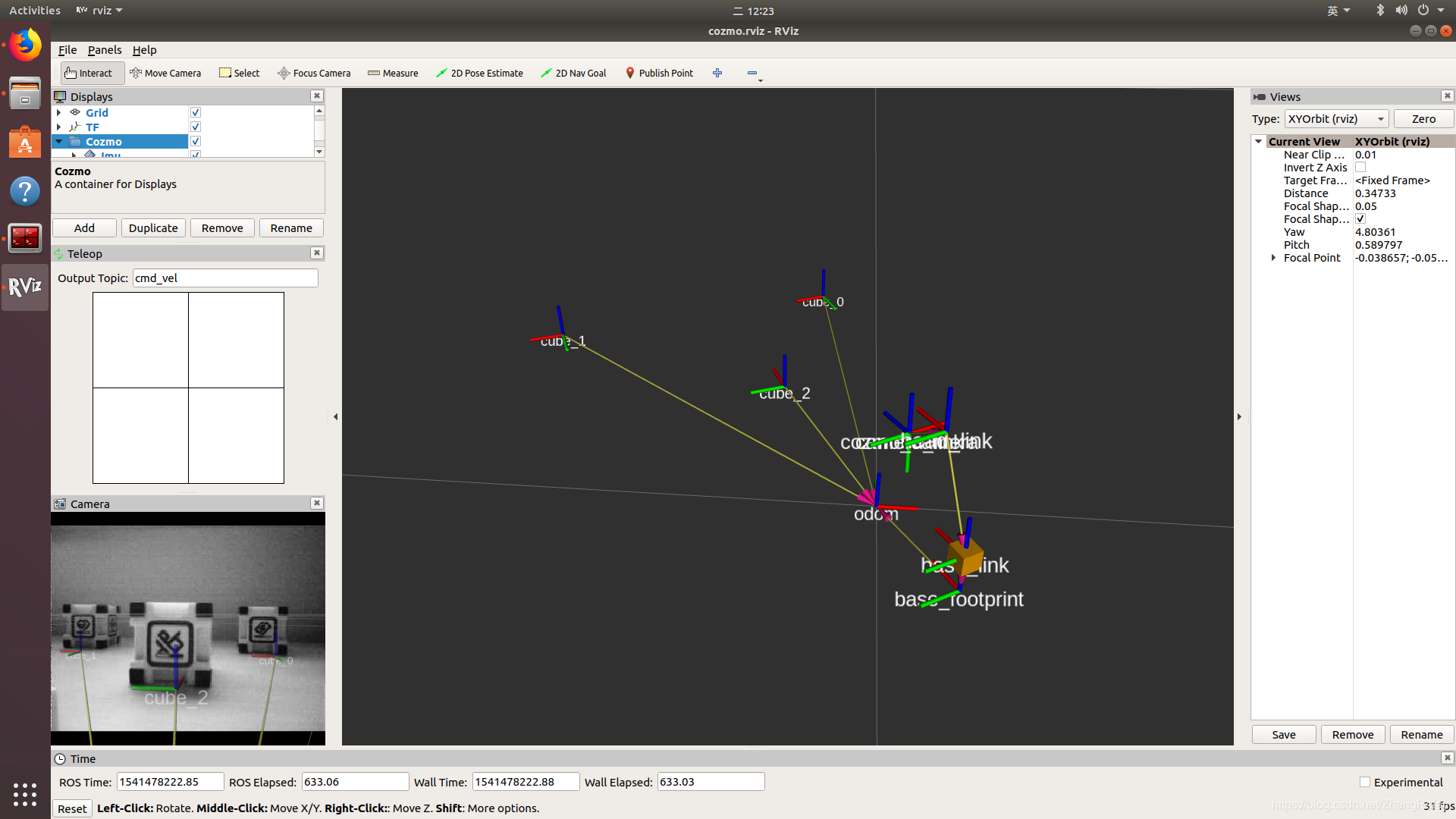
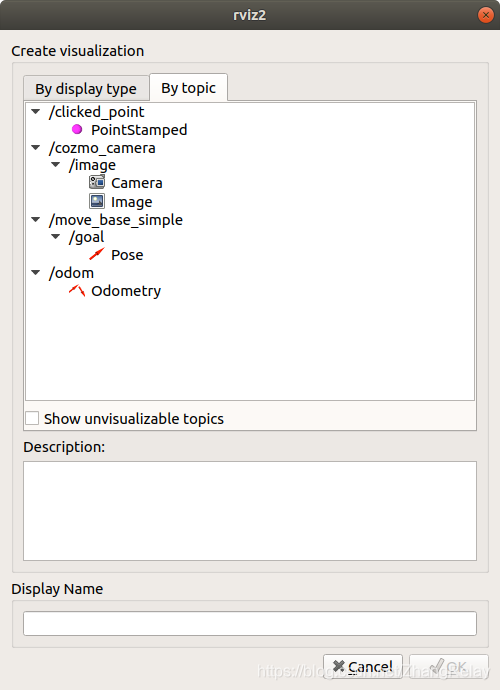
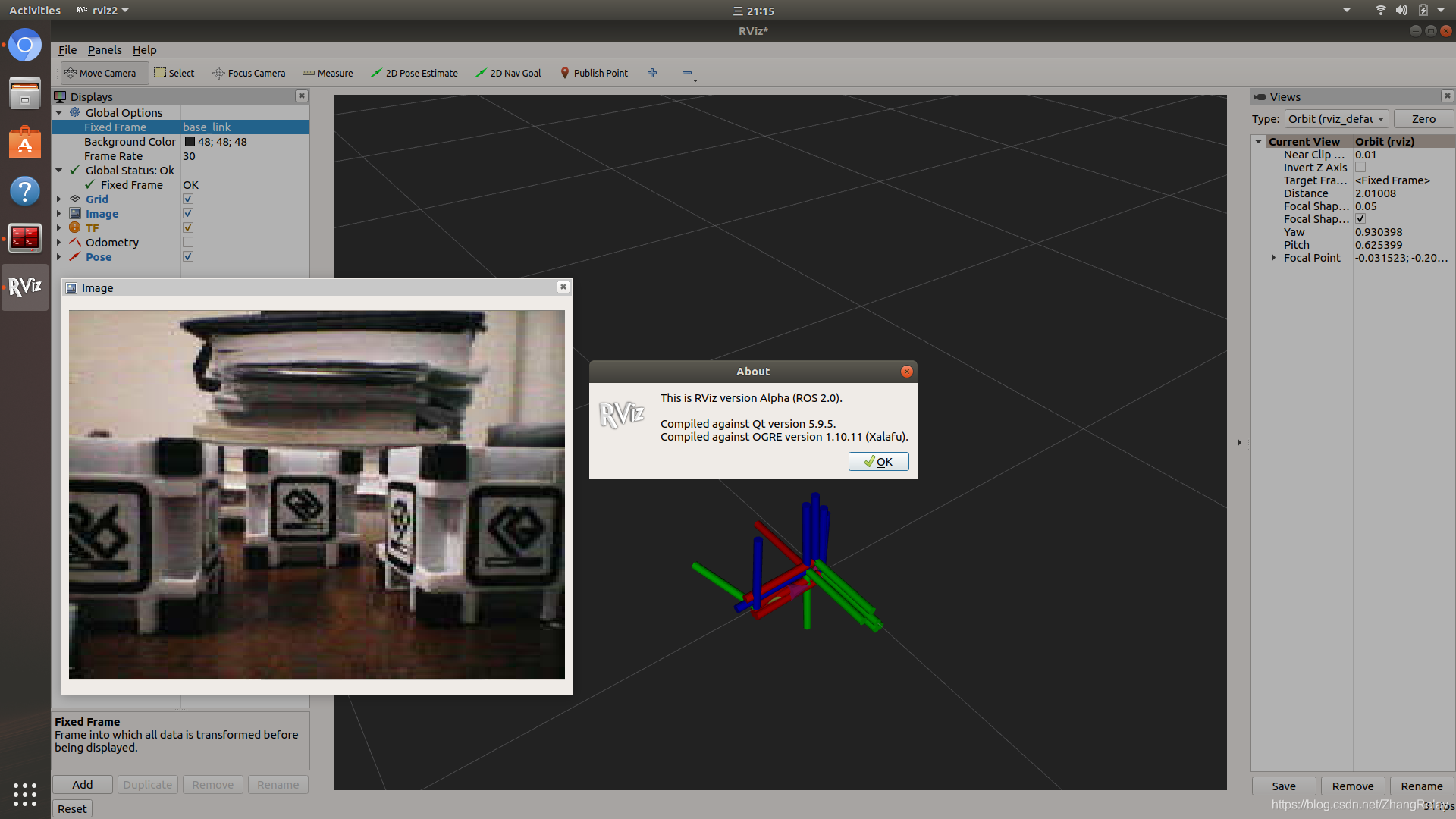
Crystal-ros2(rviz2):
Fin
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/86180415

- 点赞
- 收藏
- 关注作者
评论(0)