移动机器人中的现代控制理论之状态方程的解

【摘要】 大部分现代控制理论习题都可以通过计算机辅助解决,如Matlab或Octave Online。
这里,重点推荐Octave Online,如下图所示,无需安装,直接打开网页使用:
在上一篇中讲述了最常见的地面差动机器人的状态方程,那么其解是什么形式呢?
https://blog.csdn.net/ZhangRelay/article/details/88...
大部分现代控制理论习题都可以通过计算机辅助解决,如Matlab或Octave Online。
这里,重点推荐Octave Online,如下图所示,无需安装,直接打开网页使用:

在上一篇中讲述了最常见的地面差动机器人的状态方程,那么其解是什么形式呢?
https://blog.csdn.net/ZhangRelay/article/details/88033016
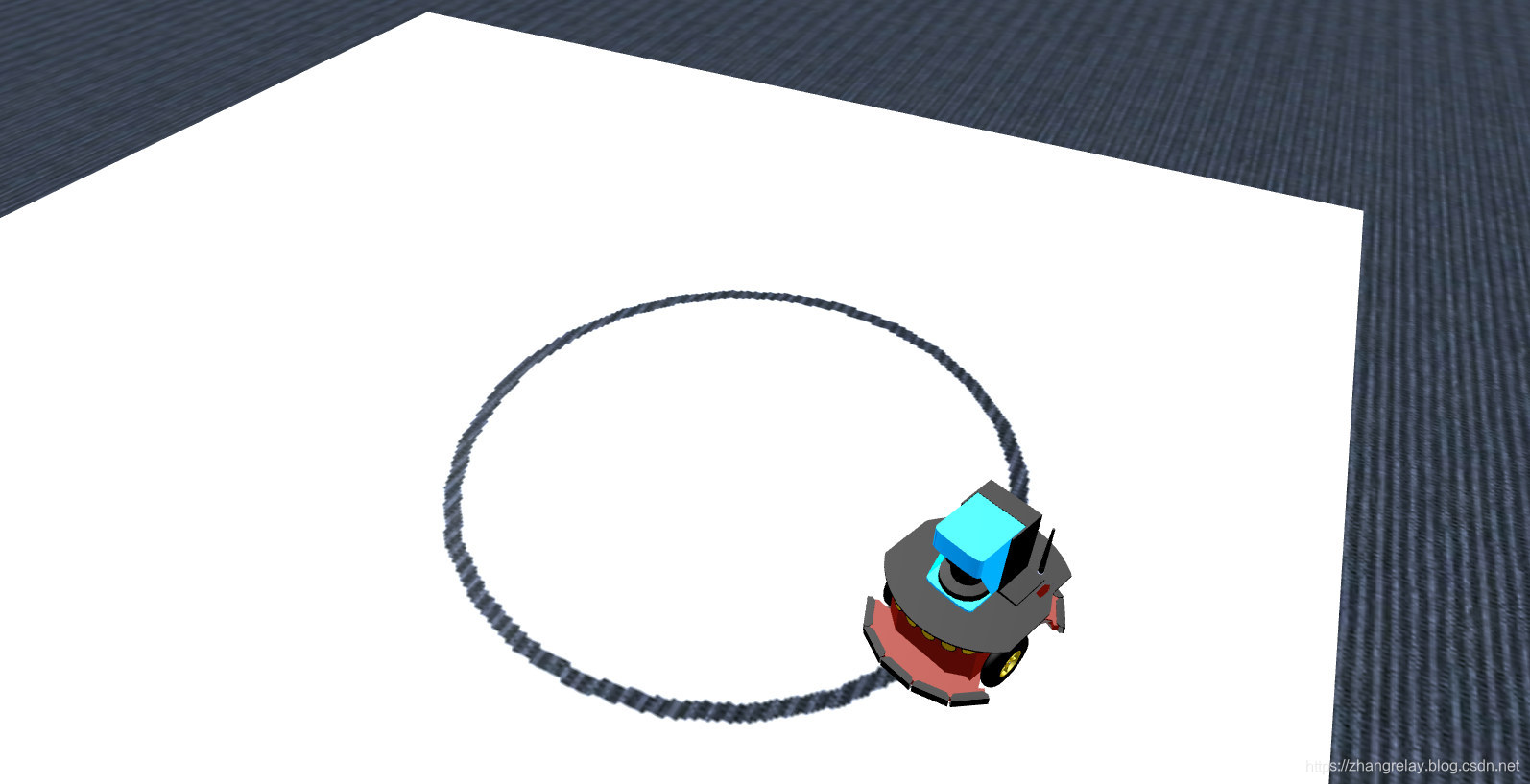
给定初始位置和左右轮的速度,机器人就可以绘制出在二维平面空间运动轨迹。
依据左右轮速度得到轨迹为正解,依据轨迹求左右轮速度为逆解。
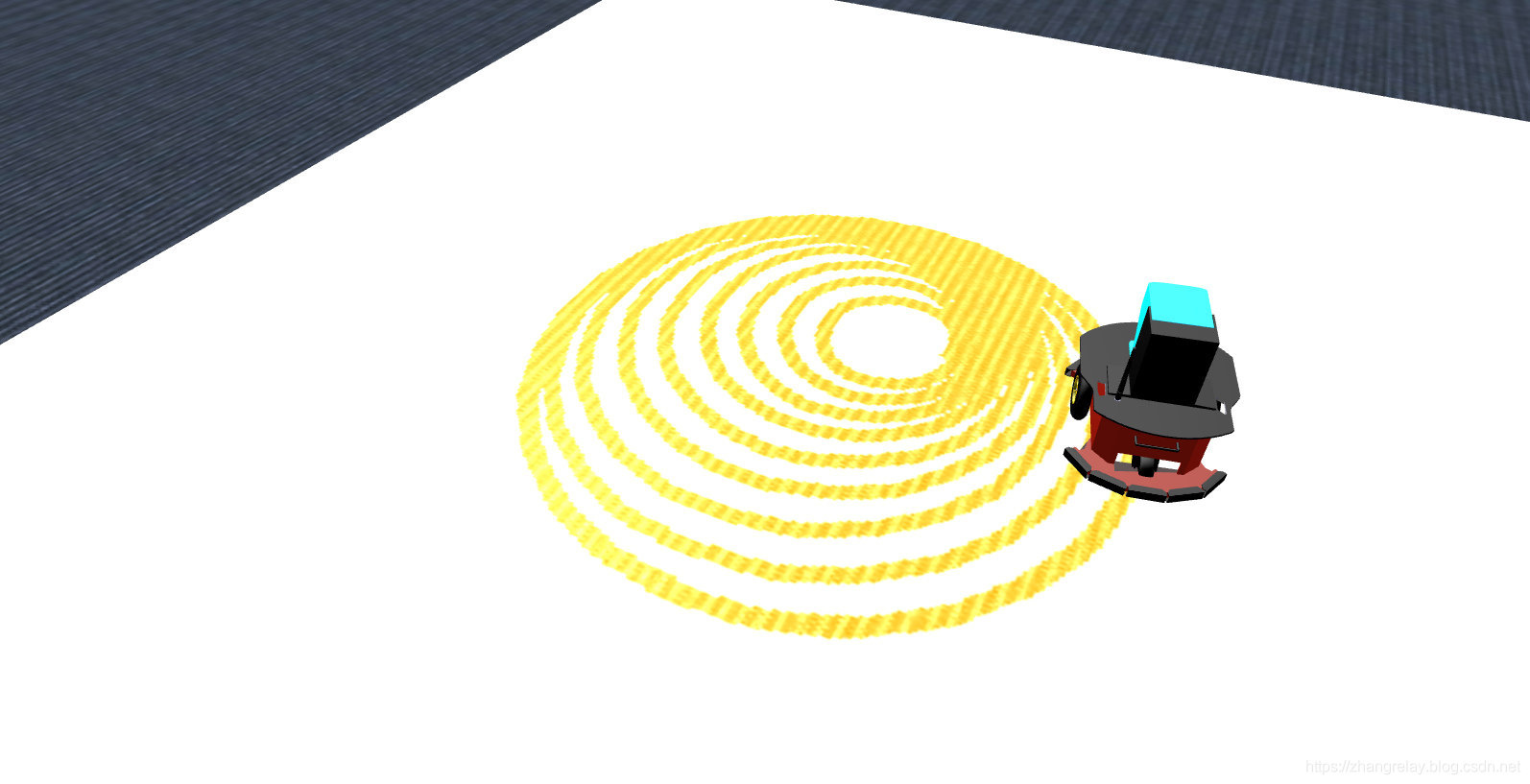
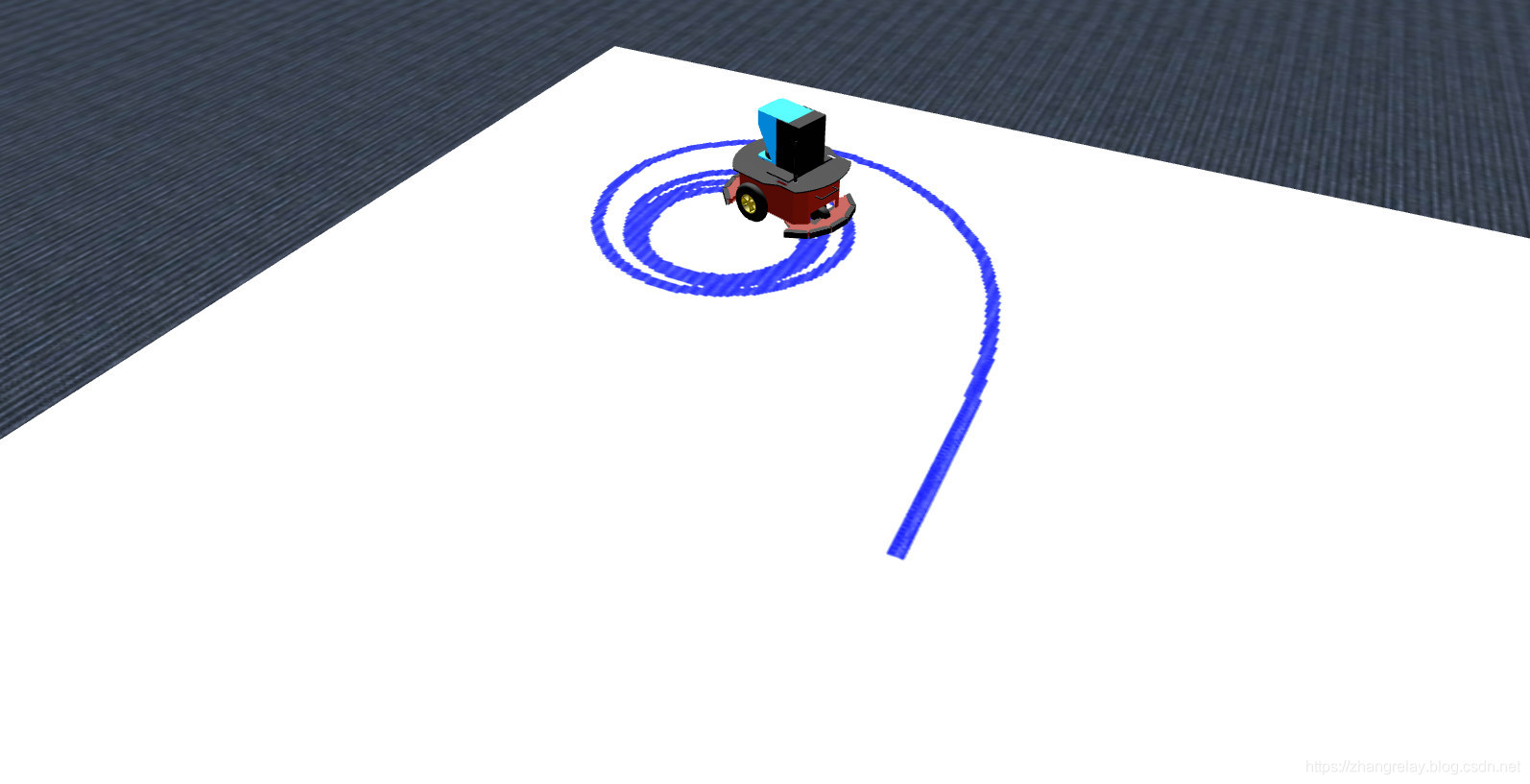
观察下面图示,并编写程序控制机器人左右轮速度实现如下二维空间运动轨迹,直线,圆,曲线等。

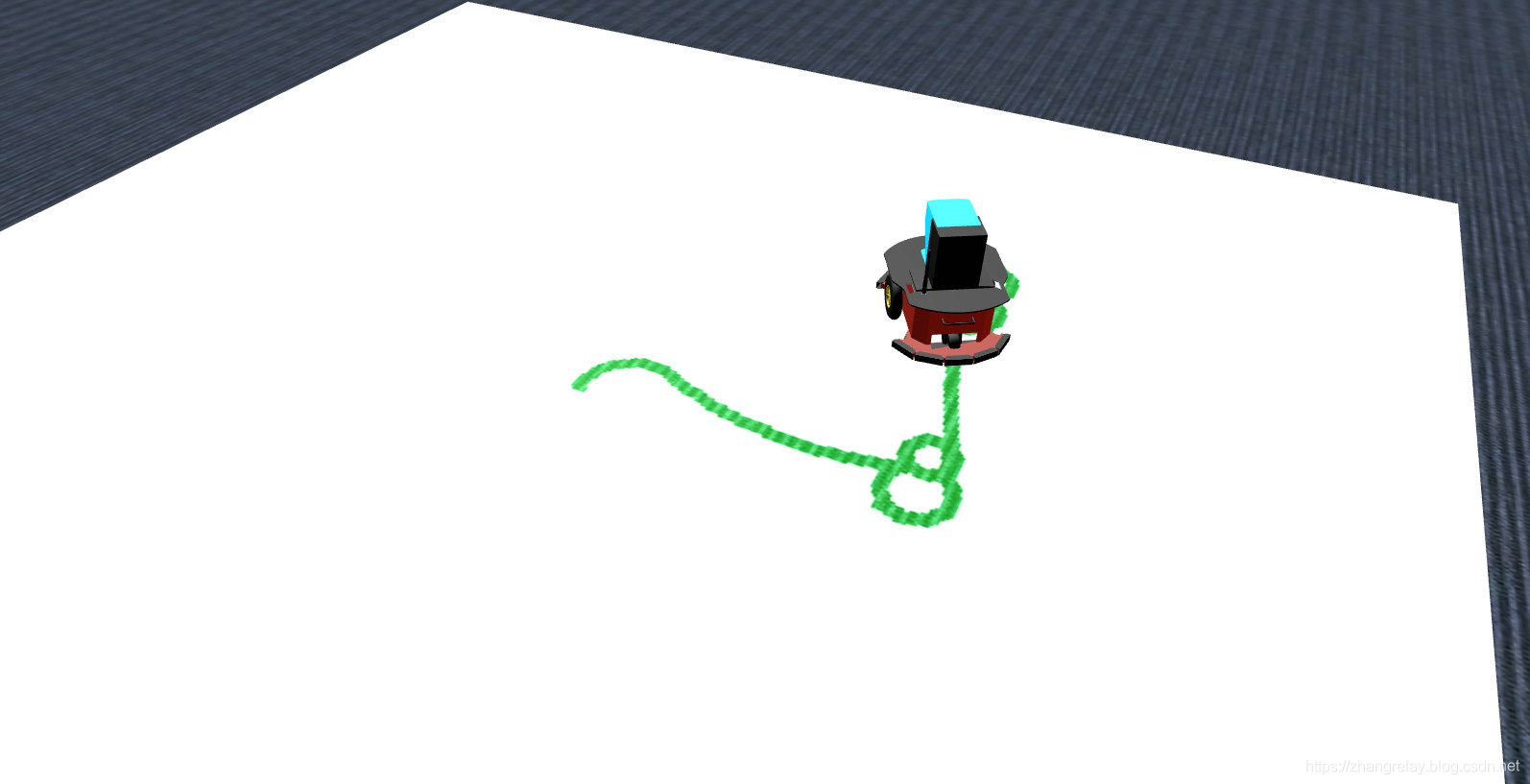
思考题:机器人轨迹为正弦曲线,如何实现?(此部分为移动机器人运动控制路径规划方向的基础)
烧脑题(无需完全一致的路径图案,相似即可):


需给出数学推导公式和对应实现的代码,思考高等数学中,连续,一致连续与上述路径曲线的关系?
扩展阅读:系统稳定性之barbalat引理
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/88200899

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)