强化学习笔记3-Python/OpenAI/TensorFlow/ROS-规划博弈

规划:主要涉及马尔科夫决策(MDP),常用于已知环境求解;
博弈:主要涉及蒙特卡罗方法,常用于未知状态求解。
- 基础知识点:
- Markov Decision Processes-MIT
- https://ocw.mit.edu/courses/electrical-engineering-and-computer-science/6-825-techniques-in-artificial-intelligence-sma-5504-fall-2002/lecture-notes/Lecture20FinalPart1.pdf
- Markov Decision Processes-Harvard
- http://am121.seas.harvard.edu/site/wp-content/uploads/2011/03/MarkovDecisionProcesses-HillierLieberman.pdf
- Markov Decision Processes-Purdue&Duke
- https://www.cs.rice.edu/~vardi/dag01/givan1.pdf
- Monte Carlo Method-MIT
- http://web.mit.edu/course/16/16.90/BackUp/www/pdfs/Chapter17.pdf
- http://www0.cs.ucl.ac.uk/staff/d.silver/web/Teaching_files
案例分析:
利用价值迭代解决冻湖问题
目标:
想象一下,从你家到办公室有一个冰冻的湖泊,你应该在冰冻的湖面上走到你的办公室。 但是哎呀! 在它们之间的冰冻湖中会有一个洞,因此在冰冻的湖中行走时要小心,以免被困在洞中。 看下图,其中:

S是起始位置(家)
F是可以步行的冰湖
H是必须非常小心的洞
G是目标(办公室)
好的,现在让我们使用我们的智能体而不是您来找到到达办公室的正确方法。 智能体的目标是找到从S到G的最佳路径,而不会被困在H.如何代理可以实现这一目标? 如果它正确地在冰冻的湖面上行走,我们给予代理+1点作为奖励,如果它落入洞中则给0点。 因此,智能体可以确定哪个是正确的操作。 智能体现在将尝试找到最优策略。 最优政策意味着采取最大化智能体奖励的正确途径。 如果智能体正在最大化奖励,显然智能体正在学习跳过洞并到达目的地。
具体实现代码如下:
-
import gym
-
import numpy as np
-
env = gym.make('FrozenLake-v0')
-
env.render()
-
def value_iteration(env, gamma = 1.0):
-
-
# initialize value table with zeros
-
value_table = np.zeros(env.observation_space.n)
-
-
# set number of iterations and threshold
-
no_of_iterations = 100000
-
threshold = 1e-20
-
-
for i in range(no_of_iterations):
-
-
# On each iteration, copy the value table to the updated_value_table
-
updated_value_table = np.copy(value_table)
-
-
# Now we calculate Q Value for each actions in the state
-
# and update the value of a state with maximum Q value
-
-
for state in range(env.observation_space.n):
-
Q_value = []
-
for action in range(env.action_space.n):
-
next_states_rewards = []
-
for next_sr in env.env.P[state][action]:
-
trans_prob, next_state, reward_prob, _ = next_sr
-
next_states_rewards.append((trans_prob * (reward_prob + gamma * updated_value_table[next_state])))
-
-
Q_value.append(np.sum(next_states_rewards))
-
-
value_table[state] = max(Q_value)
-
-
# we will check whether we have reached the convergence i.e whether the difference
-
# between our value table and updated value table is very small. But how do we know it is very
-
# small? We set some threshold and then we will see if the difference is less
-
# than our threshold, if it is less, we break the loop and return the value function as optimal
-
# value function
-
-
if (np.sum(np.fabs(updated_value_table - value_table)) <= threshold):
-
print ('Value-iteration converged at iteration# %d.' %(i+1))
-
break
-
-
return value_table
-
-
def extract_policy(value_table, gamma = 1.0):
-
-
# initialize the policy with zeros
-
policy = np.zeros(env.observation_space.n)
-
-
-
for state in range(env.observation_space.n):
-
-
# initialize the Q table for a state
-
Q_table = np.zeros(env.action_space.n)
-
-
# compute Q value for all ations in the state
-
for action in range(env.action_space.n):
-
for next_sr in env.env.P[state][action]:
-
trans_prob, next_state, reward_prob, _ = next_sr
-
Q_table[action] += (trans_prob * (reward_prob + gamma * value_table[next_state]))
-
-
# select the action which has maximum Q value as an optimal action of the state
-
policy[state] = np.argmax(Q_table)
-
-
return policy
-
-
optimal_value_function = value_iteration(env=env,gamma=1.0)
-
-
optimal_policy = extract_policy(optimal_value_function, gamma=1.0)
-
-
print(optimal_value_function)
-
print(optimal_policy)
-
-
-
显示结果如下:
SFFF
FHFH
FFFH
HFFG
Value-iteration converged at iteration# 1373.
[0.82352941 0.82352941 0.82352941 0.82352941
0.82352941 0. 0.52941176 0.
0.82352941 0.82352941 0.76470588 0.
0. 0.88235294 0.94117647 0. ]
[0. 3. 3. 3. 0. 0. 0. 0. 3. 1. 0. 0. 0. 2. 1. 0.]
使用策略迭代解决冻湖问题
具体实现代码如下:
-
import gym
-
import numpy as np
-
env = gym.make('FrozenLake-v0')
-
env.render()
-
def compute_value_function(policy, gamma=1.0):
-
-
# initialize value table with zeros
-
value_table = np.zeros(env.env.nS)
-
-
# set the threshold
-
threshold = 1e-10
-
-
while True:
-
-
# copy the value table to the updated_value_table
-
updated_value_table = np.copy(value_table)
-
-
# for each state in the environment, select the action according to the policy and compute the value table
-
for state in range(env.env.nS):
-
action = policy[state]
-
-
# build the value table with the selected action
-
value_table[state] = sum([trans_prob * (reward_prob + gamma * updated_value_table[next_state])
-
for trans_prob, next_state, reward_prob, _ in env.env.P[state][action]])
-
-
if (np.sum((np.fabs(updated_value_table - value_table))) <= threshold):
-
break
-
-
return value_table
-
-
def extract_policy(value_table, gamma = 1.0):
-
-
# Initialize the policy with zeros
-
policy = np.zeros(env.observation_space.n)
-
-
-
for state in range(env.observation_space.n):
-
-
# initialize the Q table for a state
-
Q_table = np.zeros(env.action_space.n)
-
-
# compute Q value for all ations in the state
-
for action in range(env.action_space.n):
-
for next_sr in env.env.P[state][action]:
-
trans_prob, next_state, reward_prob, _ = next_sr
-
Q_table[action] += (trans_prob * (reward_prob + gamma * value_table[next_state]))
-
-
# Select the action which has maximum Q value as an optimal action of the state
-
policy[state] = np.argmax(Q_table)
-
-
return policy
-
-
def policy_iteration(env,gamma = 1.0):
-
-
# Initialize policy with zeros
-
old_policy = np.zeros(env.observation_space.n)
-
no_of_iterations = 200000
-
-
for i in range(no_of_iterations):
-
-
# compute the value function
-
new_value_function = compute_value_function(old_policy, gamma)
-
-
# Extract new policy from the computed value function
-
new_policy = extract_policy(new_value_function, gamma)
-
-
# Then we check whether we have reached convergence i.e whether we found the optimal
-
# policy by comparing old_policy and new policy if it same we will break the iteration
-
# else we update old_policy with new_policy
-
-
if (np.all(old_policy == new_policy)):
-
print ('Policy-Iteration converged at step %d.' %(i+1))
-
break
-
old_policy = new_policy
-
-
return new_policy
-
-
print (policy_iteration(env))
显示结果如下:
SFFF
FHFH
FFFH
HFFG
Policy-Iteration converged at step 7.
[0. 3. 3. 3. 0. 0. 0. 0. 3. 1. 0. 0. 0. 2. 1. 0.]
思考:比较价值迭代和策略迭代的差异?
掌握:马尔科夫特征和应用,即时奖励和折扣系数,贝尔曼方程的作用,推导Q函数贝尔曼方程,值函数与Q函数关联性。
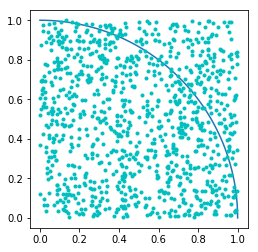
用蒙特卡罗估计 的值
的值
代码如下:
-
import numpy as np
-
import math
-
import random
-
import matplotlib.pyplot as plt
-
#%matplotlib inline
-
-
square_size = 1
-
points_inside_circle = 0
-
points_inside_square = 0
-
sample_size = 1000
-
arc = np.linspace(0, np.pi/2, 100)
-
-
def generate_points(size):
-
x = random.random()*size
-
y = random.random()*size
-
return (x, y)
-
-
def is_in_circle(point, size):
-
return math.sqrt(point[0]**2 + point[1]**2) <= size
-
-
def compute_pi(points_inside_circle, points_inside_square):
-
return 4 * (points_inside_circle / points_inside_square)
-
-
plt.axes().set_aspect('equal')
-
plt.plot(1*np.cos(arc), 1*np.sin(arc))
-
-
-
for i in range(sample_size):
-
point = generate_points(square_size)
-
plt.plot(point[0], point[1], 'c.')
-
points_inside_square += 1
-
-
if is_in_circle(point, square_size):
-
points_inside_circle += 1
-
-
print("Approximate value of pi is {}"
-
.format(compute_pi(points_inside_circle, points_inside_square)))
样本2000:

第一次
Approximate value of pi is 3.148
第二次
Approximate value of pi is 3.132
第三次
Approximate value of pi is 3.184
样本10000:

Approximate value of pi is 3.1444
BlackJack游戏
-
import gym
-
import numpy as np
-
from matplotlib import pyplot
-
import matplotlib.pyplot as plt
-
from mpl_toolkits.mplot3d import Axes3D
-
from collections import defaultdict
-
from functools import partial
-
%matplotlib inline
-
plt.style.use('ggplot')
-
-
env = gym.make('Blackjack-v0')
-
-
def sample_policy(observation):
-
score, dealer_score, usable_ace = observation
-
return 0 if score >= 20 else 1
-
-
def generate_episode(policy, env):
-
-
# we initialize the list for storing states, actions, and rewards
-
states, actions, rewards = [], [], []
-
-
# Initialize the gym environment
-
observation = env.reset()
-
-
while True:
-
-
# append the states to the states list
-
states.append(observation)
-
-
# now, we select an action using our sample_policy function and append the action to actions list
-
-
action = sample_policy(observation)
-
actions.append(action)
-
-
# We perform the action in the environment according to our sample_policy, move to the next state
-
# and receive reward
-
observation, reward, done, info = env.step(action)
-
rewards.append(reward)
-
-
# Break if the state is a terminal state
-
if done:
-
break
-
-
return states, actions, rewards
-
-
def first_visit_mc_prediction(policy, env, n_episodes):
-
-
# First, we initialize the empty value table as a dictionary for storing the values of each state
-
value_table = defaultdict(float)
-
N = defaultdict(int)
-
-
-
for _ in range(n_episodes):
-
-
# Next, we generate the epsiode and store the states and rewards
-
states, _, rewards = generate_episode(policy, env)
-
returns = 0
-
-
# Then for each step, we store the rewards to a variable R and states to S, and we calculate
-
# returns as a sum of rewards
-
-
for t in range(len(states) - 1, -1, -1):
-
R = rewards[t]
-
S = states[t]
-
-
returns += R
-
-
# Now to perform first visit MC, we check if the episode is visited for the first time, if yes,
-
# we simply take the average of returns and assign the value of the state as an average of returns
-
-
if S not in states[:t]:
-
N[S] += 1
-
value_table[S] += (returns - value_table[S]) / N[S]
-
-
return value_table
-
-
value = first_visit_mc_prediction(sample_policy, env, n_episodes=500000)
-
-
for i in range(10):
-
print(value.popitem())
-
-
def plot_blackjack(V, ax1, ax2):
-
player_sum = np.arange(12, 21 + 1)
-
dealer_show = np.arange(1, 10 + 1)
-
usable_ace = np.array([False, True])
-
state_values = np.zeros((len(player_sum), len(dealer_show), len(usable_ace)))
-
-
for i, player in enumerate(player_sum):
-
for j, dealer in enumerate(dealer_show):
-
for k, ace in enumerate(usable_ace):
-
state_values[i, j, k] = V[player, dealer, ace]
-
-
X, Y = np.meshgrid(player_sum, dealer_show)
-
-
ax1.plot_wireframe(X, Y, state_values[:, :, 0])
-
ax2.plot_wireframe(X, Y, state_values[:, :, 1])
-
-
for ax in ax1, ax2:
-
ax.set_zlim(-1, 1)
-
ax.set_ylabel('player sum')
-
ax.set_xlabel('dealer showing')
-
ax.set_zlabel('state-value')
-
-
fig, axes = pyplot.subplots(nrows=2, figsize=(5, 8),
-
subplot_kw={'projection': '3d'})
-
axes[0].set_title('value function without usable ace')
-
axes[1].set_title('value function with usable ace')
-
plot_blackjack(value, axes[0], axes[1])
((7, 1, False), -0.6560846560846558) ((4, 7, False), -0.4481132075471699) ((18, 6, False), -0.6899690515201155) ((6, 7, False), -0.5341246290801197) ((17, 8, True), -0.3760445682451254) ((20, 6, False), 0.7093462992976795) ((8, 9, False), -0.5497553017944529) ((4, 4, False), -0.5536480686695283) ((13, 1, False), -0.6560495938435249) ((12, 10, True), -0.20648648648648643)

文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/91867331

- 点赞
- 收藏
- 关注作者
评论(0)