强化学习笔记5-Python/OpenAI/TensorFlow/ROS-阶段复习

【摘要】 到目前为止,已经完成了4节课程的学习,侧重OpenAI,分别如下:
基础知识:https://blog.csdn.net/zhangrelay/article/details/91361113程序指令:https://blog.csdn.net/zhangrelay/article/details/91414600规划博弈:https://blog.csdn.net/zha...
到目前为止,已经完成了4节课程的学习,侧重OpenAI,分别如下:
- 基础知识:https://blog.csdn.net/zhangrelay/article/details/91361113
- 程序指令:https://blog.csdn.net/zhangrelay/article/details/91414600
- 规划博弈:https://blog.csdn.net/zhangrelay/article/details/91867331
- 时间差分:https://blog.csdn.net/zhangrelay/article/details/92012795
这时候,再重新看之前博文,侧重ROS,分别如下:
- 安装配置:https://blog.csdn.net/zhangrelay/article/details/89702997
- 环境构建:https://blog.csdn.net/zhangrelay/article/details/89817010
- 深度学习:https://blog.csdn.net/zhangrelay/article/details/90177162
通过上面一系列探索学习,就能够完全掌握人工智能学工具(OpenAI)和机器人学工具(ROS)。
理解如下环境中,Q学习和SARSA差异:
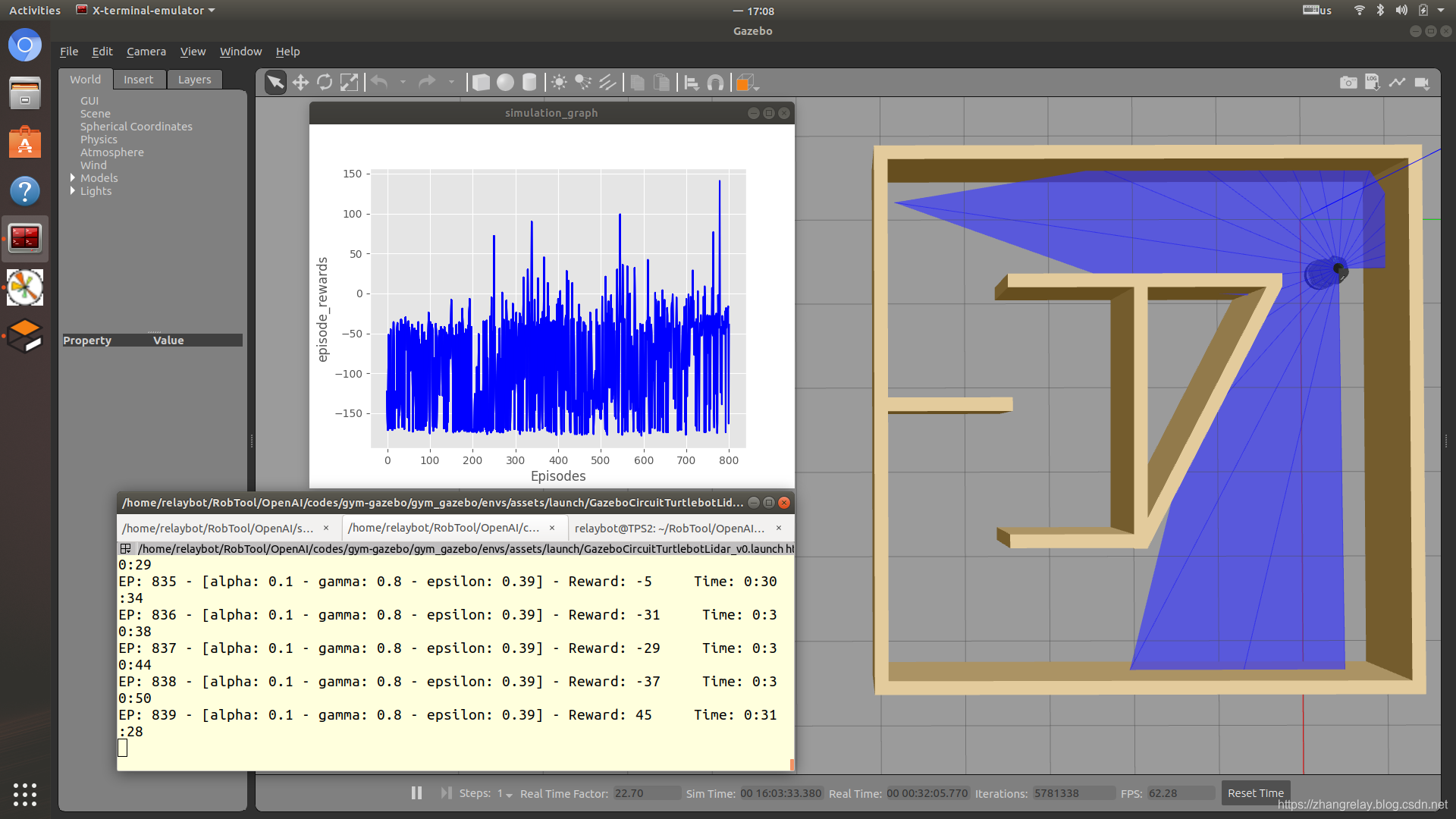
Q学习-circuit2_turtlebot_lidar_qlearn.py:
-
#!/usr/bin/env python
-
import gym
-
from gym import wrappers
-
import gym_gazebo
-
import time
-
import numpy
-
import random
-
import time
-
-
import qlearn
-
import liveplot
-
-
def render():
-
render_skip = 0 #Skip first X episodes.
-
render_interval = 50 #Show render Every Y episodes.
-
render_episodes = 10 #Show Z episodes every rendering.
-
-
if (x%render_interval == 0) and (x != 0) and (x > render_skip):
-
env.render()
-
elif ((x-render_episodes)%render_interval == 0) and (x != 0) and (x > render_skip) and (render_episodes < x):
-
env.render(close=True)
-
-
if __name__ == '__main__':
-
-
env = gym.make('GazeboCircuit2TurtlebotLidar-v0')
-
-
outdir = '/tmp/gazebo_gym_experiments'
-
env = gym.wrappers.Monitor(env, outdir, force=True)
-
plotter = liveplot.LivePlot(outdir)
-
-
last_time_steps = numpy.ndarray(0)
-
-
qlearn = qlearn.QLearn(actions=range(env.action_space.n),
-
alpha=0.2, gamma=0.8, epsilon=0.9)
-
-
initial_epsilon = qlearn.epsilon
-
-
epsilon_discount = 0.9986
-
-
start_time = time.time()
-
total_episodes = 10000
-
highest_reward = 0
-
-
for x in range(total_episodes):
-
done = False
-
-
cumulated_reward = 0 #Should going forward give more reward then L/R ?
-
-
observation = env.reset()
-
-
if qlearn.epsilon > 0.05:
-
qlearn.epsilon *= epsilon_discount
-
-
#render() #defined above, not env.render()
-
-
state = ''.join(map(str, observation))
-
-
for i in range(1500):
-
-
# Pick an action based on the current state
-
action = qlearn.chooseAction(state)
-
-
# Execute the action and get feedback
-
observation, reward, done, info = env.step(action)
-
cumulated_reward += reward
-
-
if highest_reward < cumulated_reward:
-
highest_reward = cumulated_reward
-
-
nextState = ''.join(map(str, observation))
-
-
qlearn.learn(state, action, reward, nextState)
-
-
env._flush(force=True)
-
-
if not(done):
-
state = nextState
-
else:
-
last_time_steps = numpy.append(last_time_steps, [int(i + 1)])
-
break
-
-
if x%100==0:
-
plotter.plot(env)
-
-
m, s = divmod(int(time.time() - start_time), 60)
-
h, m = divmod(m, 60)
-
print ("EP: "+str(x+1)+" - [alpha: "+str(round(qlearn.alpha,2))+" - gamma: "+str(round(qlearn.gamma,2))+" - epsilon: "+str(round(qlearn.epsilon,2))+"] - Reward: "+str(cumulated_reward)+" Time: %d:%02d:%02d" % (h, m, s))
-
-
#Github table content
-
print ("\n|"+str(total_episodes)+"|"+str(qlearn.alpha)+"|"+str(qlearn.gamma)+"|"+str(initial_epsilon)+"*"+str(epsilon_discount)+"|"+str(highest_reward)+"| PICTURE |")
-
-
l = last_time_steps.tolist()
-
l.sort()
-
-
#print("Parameters: a="+str)
-
print("Overall score: {:0.2f}".format(last_time_steps.mean()))
-
print("Best 100 score: {:0.2f}".format(reduce(lambda x, y: x + y, l[-100:]) / len(l[-100:])))
-
-
env.close()
SARSA-circuit2_turtlebot_lidar_sarsa.py:
-
#!/usr/bin/env python
-
import gym
-
from gym import wrappers
-
import gym_gazebo
-
import time
-
import numpy
-
import random
-
import time
-
-
import liveplot
-
import sarsa
-
-
-
if __name__ == '__main__':
-
-
env = gym.make('GazeboCircuit2TurtlebotLidar-v0')
-
-
outdir = '/tmp/gazebo_gym_experiments'
-
env = gym.wrappers.Monitor(env, outdir, force=True)
-
plotter = liveplot.LivePlot(outdir)
-
-
last_time_steps = numpy.ndarray(0)
-
-
sarsa = sarsa.Sarsa(actions=range(env.action_space.n),
-
epsilon=0.9, alpha=0.2, gamma=0.9)
-
-
initial_epsilon = sarsa.epsilon
-
-
epsilon_discount = 0.9986
-
-
start_time = time.time()
-
total_episodes = 10000
-
highest_reward = 0
-
-
for x in range(total_episodes):
-
done = False
-
-
cumulated_reward = 0 #Should going forward give more reward then L/R ?
-
-
observation = env.reset()
-
-
if sarsa.epsilon > 0.05:
-
sarsa.epsilon *= epsilon_discount
-
-
#render() #defined above, not env.render()
-
-
state = ''.join(map(str, observation))
-
-
for i in range(1500):
-
-
# Pick an action based on the current state
-
action = sarsa.chooseAction(state)
-
-
# Execute the action and get feedback
-
observation, reward, done, info = env.step(action)
-
cumulated_reward += reward
-
-
if highest_reward < cumulated_reward:
-
highest_reward = cumulated_reward
-
-
nextState = ''.join(map(str, observation))
-
nextAction = sarsa.chooseAction(nextState)
-
-
#sarsa.learn(state, action, reward, nextState)
-
sarsa.learn(state, action, reward, nextState, nextAction)
-
-
env._flush(force=True)
-
-
if not(done):
-
state = nextState
-
else:
-
last_time_steps = numpy.append(last_time_steps, [int(i + 1)])
-
break
-
-
if x%100==0:
-
plotter.plot(env)
-
-
m, s = divmod(int(time.time() - start_time), 60)
-
h, m = divmod(m, 60)
-
print ("EP: "+str(x+1)+" - [alpha: "+str(round(sarsa.alpha,2))+" - gamma: "+str(round(sarsa.gamma,2))+" - epsilon: "+str(round(sarsa.epsilon,2))+"] - Reward: "+str(cumulated_reward)+" Time: %d:%02d:%02d" % (h, m, s))
-
-
#Github table content
-
print ("\n|"+str(total_episodes)+"|"+str(sarsa.alpha)+"|"+str(sarsa.gamma)+"|"+str(initial_epsilon)+"*"+str(epsilon_discount)+"|"+str(highest_reward)+"| PICTURE |")
-
-
l = last_time_steps.tolist()
-
l.sort()
-
-
#print("Parameters: a="+str)
-
print("Overall score: {:0.2f}".format(last_time_steps.mean()))
-
print("Best 100 score: {:0.2f}".format(reduce(lambda x, y: x + y, l[-100:]) / len(l[-100:])))
-
-
env.close()
复习:时间差分https://blog.csdn.net/zhangrelay/article/details/92012795
其中案例出租车demo与上面turtlebot-demo,理解并掌握ROS和OpenAI这两大工具最基本的应用。
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/92050001

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)