最火爆的ROS教程-机器人操作系统入门-Melodic-

适合计算机专业学习的国内最好ROS课程,已经推出Melodic版本适用于Ubuntu18.04。
| 2018 | 2019 |
| 机器人操作系统入门 第1次开课 开课时间: 2018年03月12日 ~ 2018年05月12日 当前开课已结束 学时安排: 每周约2小时 已有27602人参加 |
机器人操作系统入门 第2次开课 开课时间: 2018年11月20日 ~ 2019年02月12日 当前开课已结束 学时安排: 1-3小时每周 已有12611人参加 |
两次开课超过4万人学习~
B站火爆:ROS机器人操作系统入门-中国大学MOOC 12.9万 还在持续上涨!霸榜第一!
Kinetic版本ros2go配置:https://blog.csdn.net/ZhangRelay/article/details/84234234
新版本Melodic已经发布了。
- 代码更新链接:https://github.com/DroidAITech/ROS-Academy-for-Beginners/tree/melodic
- 讲义源码链接:https://github.com/anchuanxu/ROS-Academy-for-Beginners-Book-Melodic
更新时间:2019/7
示例介绍
ROS入门教程的代码示例,包括以下ROS软件包:
| 软件包 | 内容 |
|---|---|
| robot_sim_demo | 机器人仿真程序,大部分示例会用到这个软件包 |
| topic_demo | topic通信,自定义msg,包括C++和python两个版本实现 |
| service_demo | service通信,自定义srv,分别以C++和python两种语言实现 |
| action_demo | action通信,自定义action,C++语言实现 |
| param_demo | param操作,分别以C++和python两种语言实现 |
| msgs_demo | 演示msg、srv、action文件的格式规范 |
| tf_demo | tf相关API操作演示,tf示例包括C++和python两个版本 |
| name_demo | 演示全局命名空间和局部命名空间下参数的提取 |
| tf_follower | 制作mybot机器人 实现mybot跟随xbot的功能 |
| urdf_demo | 创建机器人urdf模型,在RViz中显示 |
| navigation_sim_demo | 导航演示工具包,包括AMCL, Odometry Navigation等演示 |
| slam_sim_demo | 同步定位与建图演示,包括Gmapping, Karto, Hector等SLAM演示 |
| orbslam2_demo | ORB_SLAM2的演示 |
| rtabmap_demo | rtabmap的演示 |
| cartographer_demo | cartographer安装演示包 |
| dependlib | ubuntu18所依赖的包(melodic不自带) |
| ros_academy_for_beginners | Metapacakge示例,依赖了本仓库所有的pacakge |
下载和编译
-
克隆或下载ROS-Academy-for-Beginners教学包到工作空间的
/src目录下,例如~/catkin_ws/src
-
$ cd ~/catkin_ws/src
-
$ git clone https://github.com/DroidAITech/ROS-Academy-for-Beginners.git
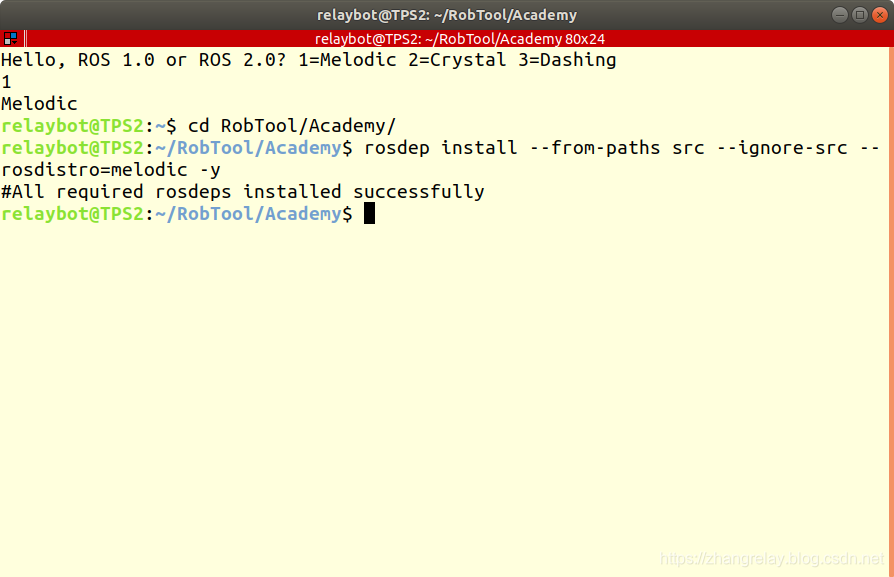
- 安装教学包所需的依赖
-
$ cd ~/catkin_ws
-
$ rosdep install --from-paths src --ignore-src --rosdistro=melodic -y
-
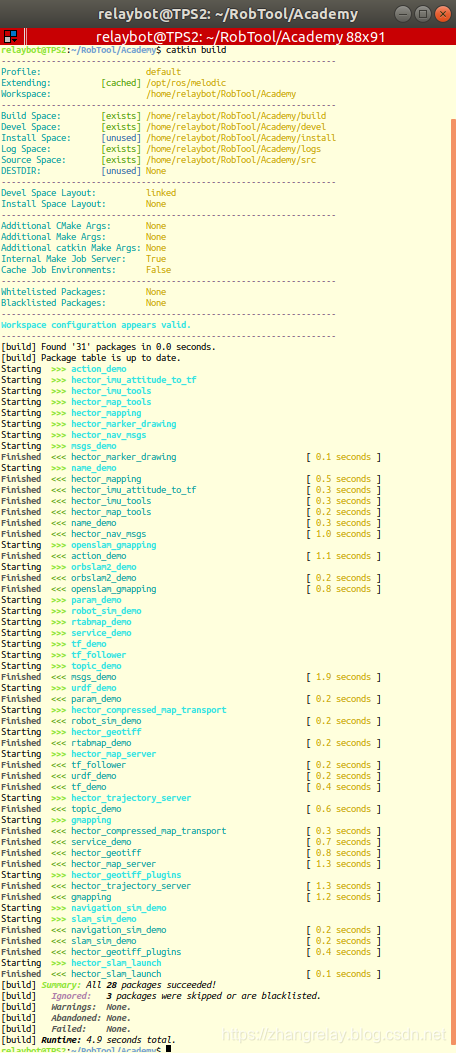
编译并刷新环境
-
$ catkin build
-
$ source ~/catkin_ws/devel/setup.bash
-
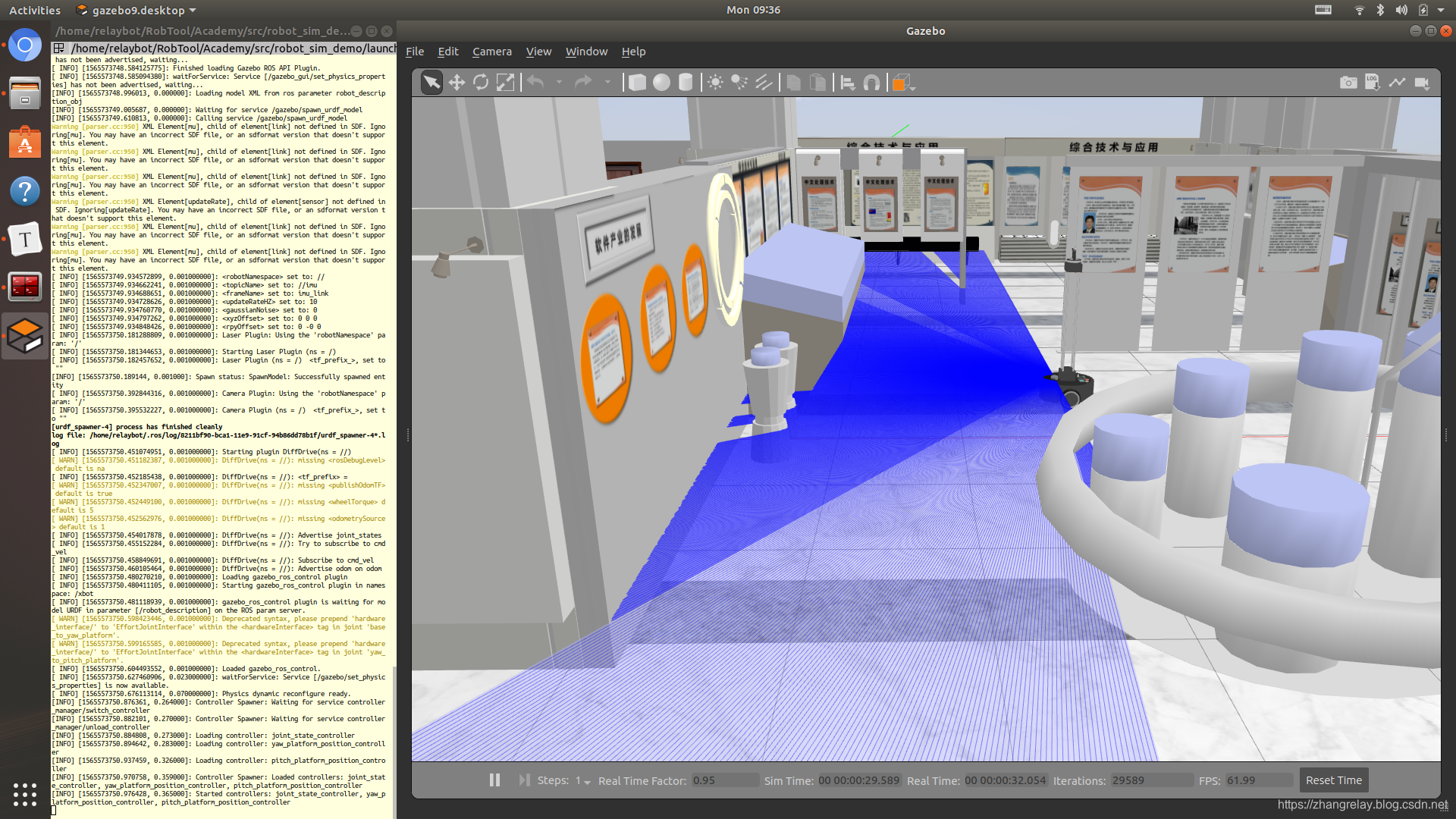
运行示例
$ roslaunch robot_sim_demo robot_spawn.launch
运行须知
-
如果本地是Ubuntu18.04,那么建议升级gazebo版本到9.10.方法类似下步骤.修改对应版本号为gazebo9.
查看Gazebo版本方法
$ gazebo -v #确认9.0以上,推荐9.10
Gazebo multi-robot simulator, version 9.10.0
Copyright (C) 2012 Open Source Robotics Foundation.
Released under the Apache 2 License.
http://gazebosim.org
Gazebo multi-robot simulator, version 9.10.0
Copyright (C) 2012 Open Source Robotics Foundation.
Released under the Apache 2 License.
http://gazebosim.org
升级方法
-
$ sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu-stable `lsb_release -cs` main" > /etc/apt/sources.list.d/gazebo-stable.list'
-
$ wget http://packages.osrfoundation.org/gazebo.key -O - | sudo apt-key add -
-
$ sudo apt-get update
-
$ sudo apt-get install gazebo9
-
确保所有依赖都已安装,如
gazebo_ros,gmapping,slam_karto,amcl。
补充阅读:
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/99286571

- 点赞
- 收藏
- 关注作者
评论(0)