ROS2使用OpenCV基础

【摘要】 这个案例需要Ubuntu Bionic, OpenCV 3.2, ROS2 Dashing and ros-dashing-camera-calibration-parsers。
安装和编译:
mkdir ~/ros2/opencv_cam_ws/src cd ~/ros2/opencv_cam_ws/src git clone https://github.com/...
这个案例需要Ubuntu Bionic, OpenCV 3.2, ROS2 Dashing and ros-dashing-camera-calibration-parsers。
安装和编译:
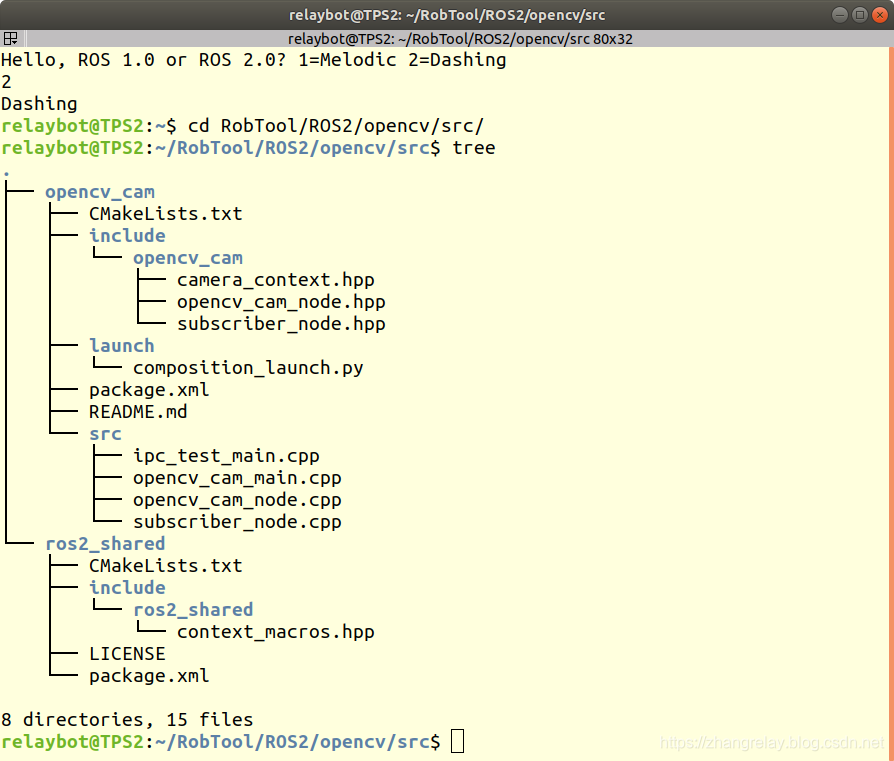
mkdir ~/ros2/opencv_cam_ws/src
cd ~/ros2/opencv_cam_ws/src
git clone https://github.com/clydemcqueen/opencv_cam.git
git clone https://github.com/ptrmu/ros2_shared.git
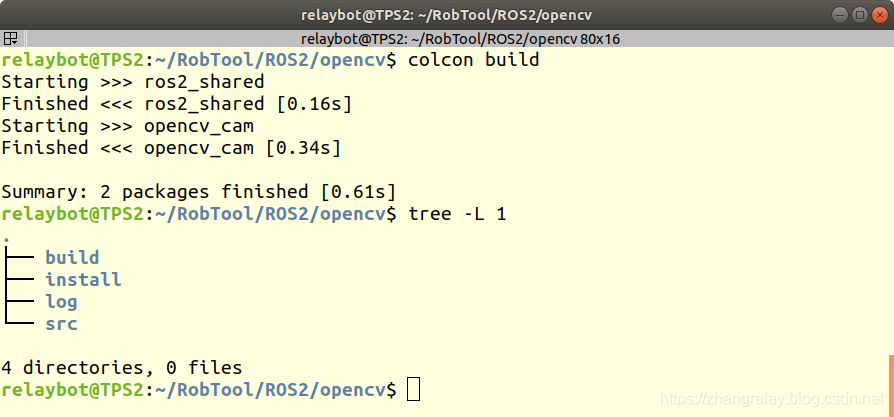
cd ~/ros2/opencv_cam_ws/
source /opt/ros/dashing/setup.bash
colcon build
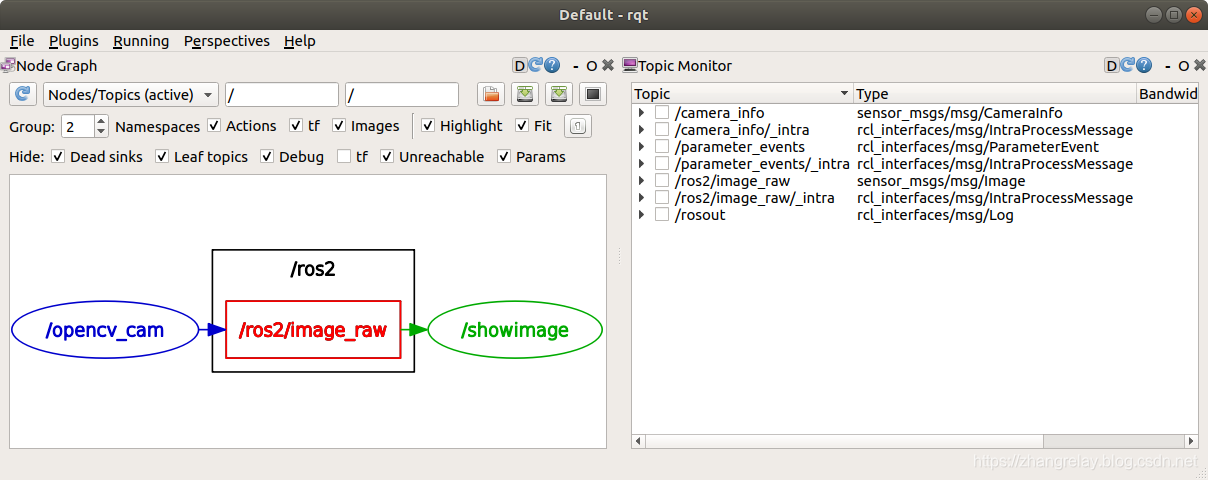
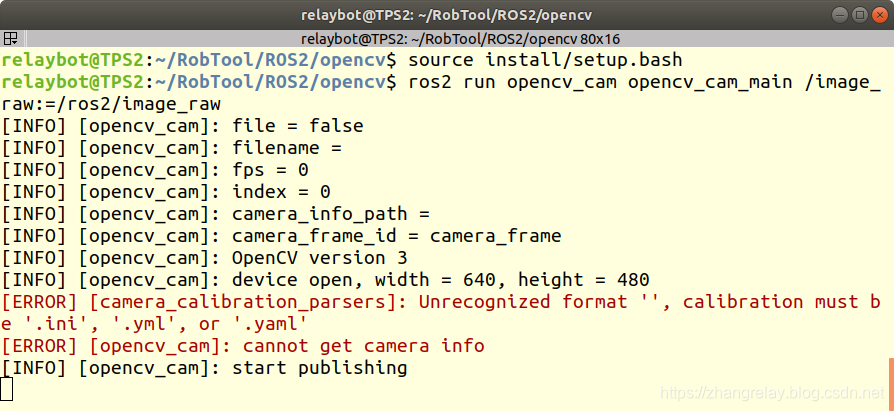
使用:
ros2 run opencv_cam opencv_cam_main

文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/100122944

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)